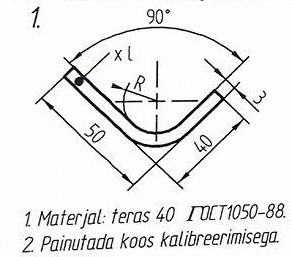
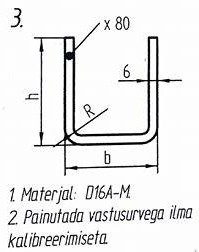
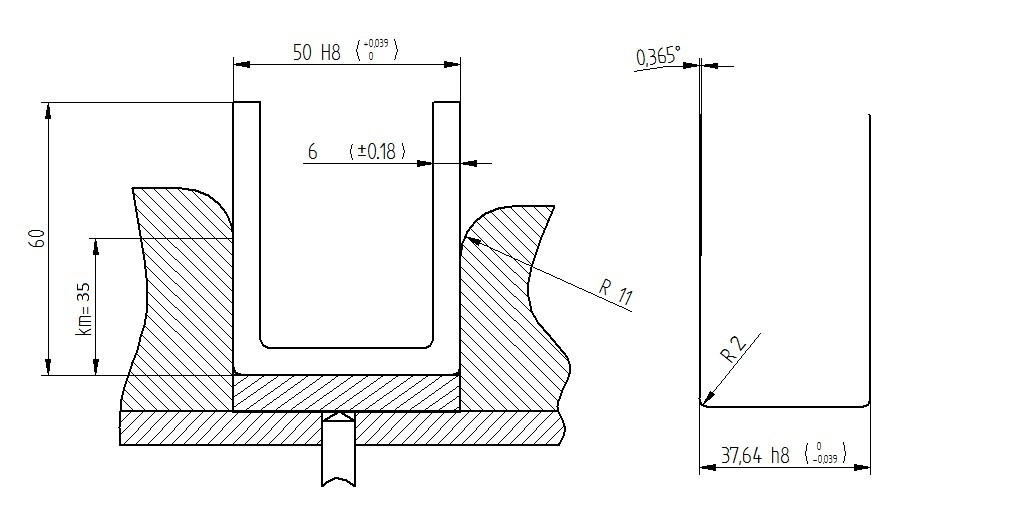
ÜLESANNE NR.3 Variant 1. Teha detailide painutamiseks vajalikud konstruktiivsed arvutused: a) arvutada toorikute pikkused; b) leida painutusjõud või kalibreerimisjõud; c) arvutada templite ja matriitside mõõdud. Teha templite ja matriitside eskiisid. 1) Lähteandmed: R = 3mm l = 50mm s= 3mm - Painutada koos kalibreerimisega Sele 7. Materjal: teras 40, ГОСТ 1050-88 σ b =Rm= 580 MPa Painutatud osa pikkus neutraalkihis: r 3 Tegur x on määratud sõltuvalt suhtest s = 3 =1 x = 0,42 Võtan tabelist 9 [1:38] π∗φ π∗90 ln = 180 (r + x*s ) = 180 (3 + 0,42 * 3) = 6,69 mm φ - painutatud osa nurga suurus, °; ln – detaili painutusraadiuse osas neutraalkihi pikkus (mm), r – detaili sisemine
KODUSED ÜLESANDED Õppeaines: STANTSID JA PRESSVORMID Mehaanikateaduskond Esitamiskuupäev: Üliõpilase allkiri:…………….. Õppejõu allkiri: ……………… Tallinn Ivo Hein SISUKORD ÜLESANNE NR. 1 ......................................................................................................................2 ÜLESANNE NR. 2 ......................................................................................................................3 ÜLESANNE NR. 3 ......................................................................................................................8 ÜLESANNE NR. 4 ....................................................................................................................17 ÜLESANNE NR. 5 ........................................................................................................
4. ÜLESANNE NR. 4 4.1 Ülesanne Määrata tõmbestantsi mõõdud kahe- või kolmeoperatsioonilisel stantsimisel ning detaili tõmbejõud ja surveplaadi survejõud kõigil tõmbamistel. Leida ka pressi tõmbejõud kõigil tõmmetel. Teha templite ja matriitside eskiisid igale tõmbele Lähteandmed s = 1 mm d1 = 110 mm d2 = 130 mm H = 140 mm h = 1130 mm R = 9 mm r = 10 mm Materjal = Teras 08 ГОСТ 1050-74 𝜎b = 330 MPa s= 1 h= 130 H= 140 R 10 R9 Od1= 110 Od2= 130 Joonis 1. Stantsitud detail 4.2 Lahendus Valin lisavaru tabelist 21 [1] H/d2 = 1,08 H = 140 mm Seega
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHE0050 PÕHIÕPPE PROJEKT ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: IGOR PENKOV TALLINN 2015 Üliõpilane Mattias Liht Üliõpilaskood 134578 MHE0050 – PÕHIÕPPE PROJEKT PROJEKTÜLESANNE 1. Projekteerida elektriajamiga vints. 2. Prototüüp: Vints koosneb järgnevatest põhielementidest: - mootorreduktor - raam - trummel - laagerdus - reduktori ja trumli ühenduselemendid - lüliti ja juhtimispult 3. Tehnilised karakteristikud Trossi kandevõime (kg) valida vastavalt üliõpilaskoodi viimasele numbrile A m = 1100 kg Trossi liikumiskiirus (m/s) valida vastavalt üliõpilaskoodi eelviimasele numbrile B v = 0,15 m/s - lasti käiguulatus, m valida -
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: KOOD: KAKB JUHENDAJA: IGOR PENKOV TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MASINATEHNIKA PROJEKT MHE0062 Projekteerida elektriajamiga vints. Tõstetav mass m= 800 kg Maksimaalne liikumiskiirus v = 0,1 m/s Trumli pikkus l = 320 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detailide joonised Joonis esitada formaadil A2-A4 Töö välja antud: 05.02.2010.a. Esitamise tähtpäev:
Reduktori projekteerimise näide 1. Mootori võimsuse arvutamine ja mootori valik Joon. 1. Konveieri trumli ajami kinemaatikaskeem 1 – mootor; 2 – sidur; 3 – hammasrattad (hammasülekanne) ; 4 – reduktori korpus; 5 – sidur; 6 – vedav rihmaratas; 7 – rihm; 8 – veetav rihmaratas; 9 – konveieri trummel; 10 – konveieri lint. Pöördemomendid ja pöörlemissagedused võllidel: Võll I - Т1 ja n1; Võll II - T2 ja n2; Võll III ehk töövõll T3 ja n3. Lähteandmed mootori valikuks: F = 3,3 kN, v = 2 m/s, D = 0,35 m, kus F on lintkonveieri koormus; v on lindi liikumise kiirus; D konveieri trumli läbimõõt. Pöördemoment töövõllil ehk III võllil: T3 = FD/ 2 = 3,3 ⋅ 103 ⋅ 0,35/ 2 = 578 Nm. Trumli pöörlemissagedus: n3 = 60 v /πD = 60 D = 60 ⋅ 2/πD = 60 ⋅0,35 =109,2 1/min. Trumli nurkkiirus ω3 = 2πD = 60 n / 60 = 11,43 rad/s Kasulik võimsus võllil III: P3 = T3 ⋅ ω3 = 57
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: KOOD: JUHENDAJA: TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MASINATEHNIKA PROJEKT MHE0062 l D v Projekteerida elektriajamiga vints. Tõstetav mass m = 680 kg Maksimaalne liikumiskiirus v = 0,1 m/s Trumli pikkus l = 300 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detaili joonised Joonis esitada formaadil A2 A4 Töö välja antud: 05.02.2010.a.
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: Kert Kerem KOOD: 082657 JUHENDAJA: Igor Penkov TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT PÕHIÕPPE PROJEKT MHX0020 Projekteerida elektriajamiga vints. Tõstetav mass m = 600 kg Maksimaalne liikumiskiirus v = 0,06 m/s Maksimaalne liikumiskiirus l = 400 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detaili joonised Joonis esitada formaadil A2 A4 Töö välja antud: 04.02.2010.a. Esitamise tähtpäev: 20.05.2010.a. Töö väljaandja: I.Penkov 1. Projekteerimise objekt ja lähted Projekteerimiseks on esitatud elektriajamiga vints kandevõimega 600 kg ja maksimaalse tõste

























Kõik kommentaarid