190,4 Teine tõmme templi, matriitsi eskiis: 156,7 1,65 1,5 Tallinn 2017 20 130 Ivo Hein ÜLESANNE NR. 5 Määrata lõikestantsi survekeskme asukoht. Stantsi eskiis (skeem) teha ise, kusjuures templite arvuks valida vähemalt 4 erimõõtmelist ja erikujulist templit. Matriitsi minimaalsed mõõtmed on 80x100mm. Panna skeemile mõõtmed. Stantsi survekeskme asukoht määrata: a) analüütilisel meetodil; b) graafilisel meetodil. Mõlema meetodi korral märkida skeemile survekeskme asukoht koos määratud mõõtmetega. Graafilisel meetodil graafilise lahenduse osa täidab kogu lehe formaat A4 pinna. Valin stantsi mõõtudega:
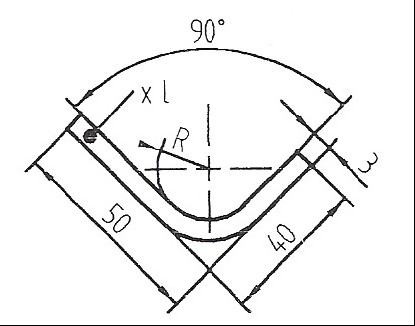
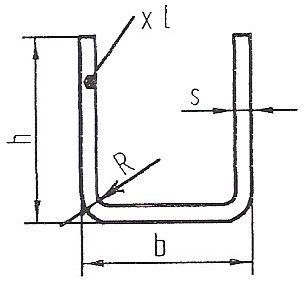
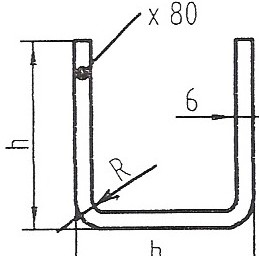
tan β - elastse vedrutuse ühepoolne suurus, º; k – tegur, mis määrab materjali neutraalkihi asukoha painutamisel sõltuvalt suhtest r/s, sealjuures k=1-x l – tugedevaheline kaugus matriitsil, mm; σs- materjalivoolavuspiir tõmbel, MPa; E – elastsusmoodul tõmbel, MPa (terasel E = 2,1·105 MPa). B – painutatava lindi laius piki painutusjoont, mm; k2 – kahenurgalise painde tegur, milline sõltub stantsi konstruktiivsetest elementidest, suhetest rm/s ja rt/s l1 – painutusõlg, mm; n - tegur, milline sõltub painutatava materjali paksusest ja haara pikkusest Arvutamine Detail A Joonis 1. Detaili painutus [1] Andmed r = 2 mm L1 = 50 mm L2 = 40 mm α = 90º s = 3 mm σ s=370 MPa B= 50mm Arvutuskäik Määran teguri x r 2 = ≈ 0,7 s 3 Valin x väärtuse tabelist 9 x=0,4 Tooriku kogupikkuse leidmine
−0,120 lma, lmb – sisemise ava matriitsi mõõt (mm), LmA, LmB – välimise kontuuri matriitsi mõõt (mm), Rm – sisemise ava matriitsi raadius (mm), Rt – välimise kontuuri matriitsi raadius (mm), Lt A, Lt B – välimise kontuuri templi mõõt (mm) Välimise kontuuri stantsi eskiis: Sisemise kontuuri stantsi eskiis: Sele 6.
Surveplaadi survejõud: d 1 t−( d 2 t +2∗r m2 ¿ 2 ]∗q Q2= π ¿ =0,785*[187,62-(140+2*10)2]*2,5= 4 =18827N/mm2 =1,9 T q= 0,25…0,30 kg/mm2 ≈ 2,5…3 N/mm2 [2:129] Pressi tõmbejõud: Ppr2=P2+Q2= 13,9+1,9= 15,8 T Eskiis: Sele 4.2 Viidatud allikad: 1. Särak, J. Lehtmaterjali külmstantsimine, stantsid ja pressvormid 2. Koost. Elvak, U., Kaasik, P. jt. (1962). Instrumendikonstruktori käsiraamat. Külmstantsimine. Tln: Valgus. 3. Loengukonspekt
-1 Sele 4. R-tüübi silindriline mootorreduktor. u K 1,5 ja tegelik ringkiirus nT D 3,14 12,0 0,16 v = = 0,1005 m/s 60 60 Üldjuhul erinevus nõudva ja tegeliku kiiruste vahel võib olla kuni 3 %. Praegu see on 0,1005 - 0,1 100%= 0,5% < [3%] . 0,1 Juhul, kui kiiruste erinevus on üle 3 %, võib selle parandada kettülekanne ülekandearvu uK muutmisega. Kontrollime vajalik võimsus trumlil P = PM 1 2 3 = 1,1 0,94 0,92 0,99 0,94 kW > = 0,67 kW PT Järelikult valitud mootorreduktor rahuldab nõudvaid tingimusi. 5. Kettülekanne arvutus Vedava ketiratta maksimaalne pöördemoment T 534 TK = = 391 Nm. uK 2 3 1,5 0,92 0,99
ülekandearv uR = 103. Reduktori väljundvõlli nurkkiirus R = *nR/30 = 3,14*13/30=1,36 Trumli tegelik pöörlemissagedus nT = nR / uK =13/1,8=7,2 1/min ja tegelik ringkiirus v= *nT*D/60=3,14*7,2*0,16/60=0,603 m/s Üldjuhul erinevus nõudva ja tegeliku kiiruste vahel võib olla kuni 3 %. Praegu see on (0,0603-0,06/0,11)*100%=0,5%<[3%] Juhul, kui kiiruste erinevus on üle 3 %, võib selle parandada kettülekanne ülekandearvu uK muutmisega. Kontrollime vajalikku võimsust trumlil: P = PM*1*2*3 = 0,55* 0,94 * 0,92 * 0,99 0,47 kW > PT = 0,353 kW Järelikult valitud mootorreduktor rahuldab nõutavaid tingimusi. 5. Kettülekanne arvutus Vedava ketiratta maksimaalne pöördemoment TK=T/(uK* 2* 3)=470/(1,8*0,92*0,99)=287 Nm Ülekandearv uK = 1,8 Vedava ketiratta minimaalne hammaste arv sõltub ratta pöörlemissagedusest: suurte
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHE0050 PÕHIÕPPE PROJEKT ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: IGOR PENKOV TALLINN 2015 Üliõpilane Mattias Liht Üliõpilaskood 134578 MHE0050 – PÕHIÕPPE PROJEKT PROJEKTÜLESANNE 1. Projekteerida elektriajamiga vints. 2. Prototüüp: Vints koosneb järgnevatest põhielementidest: - mootorreduktor - raam - trummel - laagerdus - reduktori ja trumli ühenduselemendid - lüliti ja juhtimispult 3. Tehnilised karakteristikud Trossi kandevõime (kg) valida vastavalt üliõpilaskoodi viimasele numbrile A m = 1100 kg Trossi liikumiskiirus (m/s) valida vastavalt üliõpilaskoodi eelviimasele numbrile B v = 0,15 m/s - lasti käiguulatus, m valida -
Liikumatud liited võivad omakorda olla lahtivõetavad ja mittelahtivõetavad. MASINA STRUKTUURIOSAD KUJU- JA VORMI- LIITED AJAMID ELEMENDID DETAILID ÜLEKANDED 3 Ülekannete all mõistetakse seadmeid, mis võimaldavad mehaanilist energiat üle kanda vahemaa taha ning seejuures muuta pöördemomente, jõude, kiirusi või liikumise iseloomu. Ajam on töömasinat või -mehhanismi käivitav seade, mis koosneb jõuallikast, ülekandeseadmest ja juhtimisaparatuurist. Eristatakse mehaanilist, elektrilist, hüdraulilist, pneumaatilist ajamit, vedruajamit, sisepõlemismootorit jt. Mehhanismi kinemaatikaskeem koostatakse mehhanismi liikumise uurimiseks. Skeem tehakse mõõtkavas, millest peetakse rangelt kinni


























Kõik kommentaarid