Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Reverssiivse nihkeregistri loogikaskeem paralleellaadimisega nihkeregistri loogikaskeem JK trigerite baasil.". Need materjalid aitavad sul teemat sügavamalt mõista.
loogikaskeem, nihe, infotehnoloogia, arvutitehnika, arvutidTallinna Tehnikaülikool INFOTEHNOLOOGIA TEADUSKOND Arvutitehnika instituut Kontrolltöö aines ,,Arvutid I" x Tallinn 2012 Ülesanne Koostage reverssiivse paralleel laadimisega vasakule nihutava nihkeregistri loogikaskeem T trigerite baasil. Lahendus Reversiivne vasakule nihutav kui M=1 nihutab vasakule. Paralleel laadimisega kui PL=1 siis Di=>qi, kus Di on algväärtus
Reverssiivne paraleellaadimisega nihkeregister T trigerite baasil. Kui M=1, on nihe paremale, kui M=0, on nihe vasakule. Kui PL=1, toimub parallleellaadimine välisest sisendist (Di) qi+1 qi qi qi-1 qi+1 qi-1
Tallinna Tehnikaülikool Arvutid I KAUGÕPE 1.kodutöö Jelizaveta Vavilkina Mat.nr. 124226 Rühm: IASB Ülesanne: Koostada vasakule nihutava paralleel laadimidega nihkeregistri loogikaskeem JK trigerite baasil. Esmane skeem näeb välja: Funktsiooni sõltuvus: J(i)=f(PL, di, qi-1, Ki ) Tõeväärtustabel J(i) väärus sõltub q(i) nihest ja K(i) väärtusest Karnaugh kaart vastavalt tõeväärtustabelile: J(i) = PL q(i-1) K(i) + PL d(i) q(i-1) + PL d(i) q(i) q(i-1) + + PL d(i) q(i) + PL q(i) q(i-1) + PL q(i) q(i-1) K(i) = = PL q(i-1) ( K(i) + d(i) + q(i) ) + PL q(i) (d(i) + K(i) + q(i-1) ) Skeem vastavalt valemile:
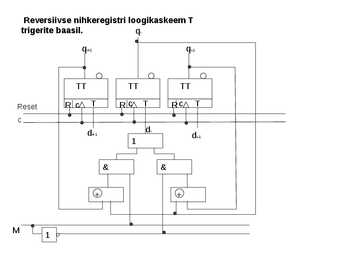
Reversiivse nihkeregistri loogikaskeem T trigerite baasil. qi qi+1 qi-1 TT TT TT Reset R c T Rc T Rc T c di+1 di di-1 1 & & + + M 1
Tallinna Tehnikaülikool Arvutid I (IAF 0041) Reversiivne parallel ladimisega nihkeregister T triggerite baasil Kontroll töö nr.1 Juhendaja: dotsent Teet Evartson Tallinn 2014 · Ülesande püstitus · Elementide kirjeldus · Loogika skeem Ülesande püstitus
Tallinna Tehnikaülikool Arvuti I kontrolltöö reversiivse nihkeregistri loogikaskeem T trigerite baasil Tallinn 2009 Reversiivne nihkerigister T-trigeri(ehk loendustriger) baasil. Juht sisend M määrab nihke suuna. M=1 nihe paremale ja M=0 nihe vasakule. C on sünkroniseerimis sisend.
1. Loendurid Loenduriteks nimetatakse impulsside loendamiseks ette nähtud loogikalülitust. Loendureid kasutatakse nii automaatikaseadmetes kui ka arvutustehnikas. Sisse tulevad impulsid. Väljundiks 0,1 kombinatsioonid. Erinevate väljundkombinatsioonide arvu nim. mooduliks. E- sisend, mis lubab loendamise Kaks diagrammi- üks sünkroonse, teine asünkroonse jaoks. Sünkroonne loendur - ümberlülitumine toimub samaaegselt v. paralleelselt. Ümberlülitumisaeg on kogu aeg samasugune. Kasut. arvutites andmetöötluses. Asünkroonne - ümberlülitusaeg pole samasugune. Uue kombinatsiooni ilmumine sõltub sellest, missugusele üleminek toimub. K asut. indikatsiooniseadmetes ja sagedusjagajates. Kahendloendur - on järjestikulised kahendkoodid. Kümnendloendur - järjestikuskoodid on 0-9 ja mood
registermälust, sellele lisatakse operandi mõõt ja tulemus läheb pinumälu järgmisesse aadressi autodekrementne adresseerimine registrist lühike aadress, mille järgi pinumälust operandid (aadressist lahutatakse op. mõõt) ja resultaat pinusse segmenteerimine kk + aadress segmendis, kui kõik andmed on ühes mälusegmendis, segmentidevaheline liikumine käsuloenduri abil indekseerimisega adresseerimine aadressibaas & indeks + nihe > kui palju peab edasi liikuma, leidmaks operande, indeksiregister (selles pikk aadress) baseerimisega adresseerimine käsukoodiga antakse ainult nihe, aadressibaas asub baasiregistris baseerimise ning indekseerimisega adresseerimine nii indeksi kui baasiregistrid suhteline adresseerimine käsukoodiga antakse nihe KUVARID CRT (Cathode Ray Tube) Kuvar, mille pilt tekitatakse kineskoobi ekraanile samuti nagu tavalises televiisoris. Kineskoop
..................................... 8 3. LCD, LED, OLED ja plasma kuvarid....................................................................................8 III............................................................................................................................................ 10 1. Dekooder......................................................................................................................... 10 2.Käsuformaadid - 0, 1, 2, 3 ja 1,5 aadressiga arvutid........................................................10 3. RAID ja SSD (pooljuht) kettad.......................................................................................... 11 IV............................................................................................................................................ 11 1. Summaator: järjestik, paralleel ja kiire ülekanne.............................................................12 2.Optilised mäluseadmed...................
nim. nihkeregistriteks. Nihkeregistri koostamiseks kasut. nii RS-, D- kui ka JK- trigereid. Nihkeregistris ühendatakse otsene ja inverteeritud väljund järgmise trigeri seadesisenditega S ja R. Seega toimub iga taktiga infosõna nihutamine ühe biti võrra. Sõltuvalt sellest kuidas trigerid omavahel ühendatakse, nihkub infosõna kas paremale või vasakule . Iga takti keskel nihutab sünkrosignaal info trigerite esimesest astmest teise. Reversiivne register- selle puhul toimub kahesuunaline nihe. 6. SUMMAATORID. Summaatoriks nim.arvuti loogikalülitust, mis on ette nähtud arvkoodide aritmeetiliseks summeerimiseks. Mitmejärgulise kahendarvu summaator koosneb mitmest ühejärgulisest summaatorist. Arvu summeerimisel tuleb lisaks kahe summeeritava arvu vastavatele järkudele liita nendega ka nooremate järkude summeerimisel tekkinud ülekanne. Seega on ühejärgulisel summaatoril kolm sisendit ning 2 väljundit. · Poolsummaator- ei arvesta liitmisel eelmisest järgust tulenevat
Pinumälu osutis säilib viimasena kirjutatud sõna aadress. Autoinkrementne adresseerimine on seotud pinumälust lugemisega. Alguses loetakse sõna, millele osutab pinumälu osuti ja siis suurendatakse pinumälu osuti nii, et see näitaks järgmisele sõnele pinumälu piirkonnas. Baseerimisega adresseerimine - selle korral aruvatatakse aadress summana baasregistri väärtustest ja nihkest, mis antakse koos käsukoodiga. Baasregistris on pikk mäluaadress, aga indeks võib olla lühem. Nihe võib olla märgiga arv. Baseerimisega adresseerimine võimaldab teatud elemendile andmestruktuurist juurdepääsu andmebaasi alguse suhtes. Baas otsustab tavaliselt andmestruktuuri algusele ja indeksiga valitakse teatud kirje. Indekseerimisega adresseerimine – selle korral leitakse aadress summana käsukoodiga koosolevast baasaadressist ja kuskil registris säiltatavast indeksist. Käsukoodiga kaasas olev aadress on pikk aadress. (anal baseerimisega)
Digitaalelektroonika 1.Miks digitaalelektroonikas kasutatakse kahendarvude süsteemi? Sest 2nd süsteemis on ainult kaks väärtust 0 ja 1 (FALSE ja TRUE). Nendega on kõige lihtsam teha vajalikke arvutusi. Teine võimalus, et on oluliselt lihtsam teha kahte olekut omavaid elemente (näiteks: juhib ja ei juhi elektrit). 2.Negatiivne ja positiivne loogika. Positiivse loogika puhul edastatakse 1 suurema pingega kui 0. Negatiivse loogika puhul vastupidi. 3.Maa mõiste elektronlülitustes. Negatiivne ja positiivne toitepinge. Maa on sisuliselt kõikidele komponentidele ühine jupp juhet, mis garanteerib vooluringi olemasolu elektronlülituses. 4.Loogika baaselemendid NING, VÕI, EI. Lihtsaim seadis, mis sooritab sisendsignaalidega mingit loogikatehet. Neil on ainult kaks olekut 0 ja 1. Tähtsamad on invertor (EI), konjunktor (NING), disjunktor (VÕI), Pierce'i element (EI-EGA) ja Shefferi element (NING-EI). 5.Baaselemendid NING-EI, VÕI-EI. 6.HiZ otstarve, kasutusnäide, HiZ realise
Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut SISSEJUHATUS DIGITAALTEHNIKASSE Jadaloendur Juhendaja: Madis Lehtla Üliõpilane: Rainer Sild 118421 AAAB Tallinn 2012 Loendamine. Koostada jadaloenduri loogikaskeem koos 7-segmendilise indikaatoriga ning kontrollida selle tööd MultiSimi tarkvaraga. Digitaaltehnikas kasutame signaali, millel on kaks olekut ,,0" (väljas) ja ,,1" (sees), nende kahe olekuga saame moodustada erinevaid arvsüsteeme ning arvnumbreid. Antud ülesandel kasutame kahendkoodi, mille valem on: X ...a3 23 a2 22 a1 21 a0 20 Sümbol ,,X" tähistab süsteemi summat, sümbolid ai tähistavad signaali olekut 0 ja 1. Meie jadaloendur loendab kuni 16 (0..
. aadress saadakse registermälust, sellele lisatakse operandi mõõt & tulemus läheb pinumälu järgmisesse aadressi 5. autodekrementne adresseerimine registrist lühike aadress, mille järgi pinumälust operandid (aadressist lahutatakse op. mõõt) & resultaat pinusse 6. segmenteerimine kk + aadress segmendis .. kui kõik andmed on ühes mälusegmendis, segmentidevaheline liikumine käsuloenduri abil 7. indekseerimisega adresseerimine aadressibaas & indeks + nihe -> kui palju peab edasi liikuma, leidmaks operande, indeksiregister (selles pikk aadress) 8. baseerimisega adresseerimine käsukoodiga antakse ainult nihe, aadressibaas asub baasiregistris 9. baseerimise ning indekseerimisega adresseerimine nii indeksi- kui baasiregistrid 10. suhteline adresseerimine käsukoodiga antakse nihe Kuvarid CRT kuvar: Cathode Ray Tube: kasutatakse metallide omadust termoemiteerida elektrone
Digitaaltehnika konspekt 1 Sissejuhatus......................................................................................................................... 3 2 Arvusüsteemid..................................................................................................................... 4 2.1 Kahend-, kaheksand-, kuueteistkümnendarvude teisendamine kümnendarvudeks.......4 2.2 Teiste arvsüsteemide arvude murdosa teisendamine kümnendarvu murdosaks...........5 2.3 Ülesanne 1.................................................................................................................... 5 2.4 Ülesanne 1a.................................................................................................................. 6 2.5 Ülesanne 1b.................................................................................................................. 6 Kümnendarvu teisendamine kahend-, kaheksand-, kuueteistkümnendarvudeks............6 2.6 K�
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Arvutitehnika instituut Oleg Toming 083905 IAPB28 Labor nr. 2 2 «Arvutid I» Õppejõud: Marina Brik Tallinn 2009 Variandikood: 160-4701/14303 Järjestikülekandega loendur mooduliga 15, +1 : HEX Q3 Q2 Q1 Q0 DEC
Digitaaltehnika Loengukonspekt Sisukord Sisukord............................................................................................................................... 2 1. Arvusüsteemid................................................................................................................. 4 1.1. Kümnendsüsteem......................................................................................................4 1.2. Kahendsüsteem.........................................................................................................4 1.3. Kaheksandsüsteem....................................................................................................4 1.4. Kuueteistkümnend süsteem...................................................................................... 4 1.5. Kahendkodeeritud kümnendsüsteem 8421...............................................................5 1.6. Kahendkodeeritud kümnendsüsteemid 2421 ja liiaga 3......
Digitaaltehnika Loengukonspekt Sisukord Sisukord...............................................................................................................................2 1. Arvusüsteemid..................................................................................................................4 1.1. Kümnendsüsteem......................................................................................................4 1.2. Kahendsüsteem.........................................................................................................4 1.3. Kaheksandsüsteem....................................................................................................4 1.4. Kuueteistkümnend süsteem......................................................................................4 1.5. Kahendkodeeritud kümnendsüsteem 8421...............................................................5 1.6. Kahendkodeeritud kümnendsüsteemid 2421 ja liiaga 3........
Boole'i funktsiooni. Laiendamiseks nimetatakse multipleksorite hierarhia tekitamist, milles iga järk multipleksoreid (2x vähem, kui nooremas) realiseerib juhtsisendite teatavat järku. 10. Komparaator: ... on võrdlusskeem, mis sisendisse tulevaid operande võrdleb ning teeb kindlaks, kas esimeses sisendis olev operand on suurem (Great), võrdne (Equal) või väiksem (Less) kui teises olev, aktiveerides vastava väljundi. 11. Koodimuundur: On loogikaskeem, mis teisendab sisendkoodi mingisse teise loogikasse. Näiteks positiivsest loogikast negatiivsesse loogikasse inversiooni läbi. Binary-Decimal. Igale sisendjärgule vastab loogikaskeem, mis toimetab teisenduse. 12. ALU: Aritmeetika-Loogikaseadme ülesandeks on mitmekohaliste kahendarvudega erinevate aritmeetiliste ja loogiliste tehete tegemine. Tehe, mida teha, määratakse juhtsisenditega, operandid andmesisenditega. Iga järgu jaoks arvutatakse väljundi väärtus iseseisvalt. Protsessor
Boole'i funktsiooni. Laiendamiseks nimetatakse multipleksorite hierarhia tekitamist, milles iga järk multipleksoreid (2x vähem, kui nooremas) realiseerib juhtsisendite teatavat järku. 10. Komparaator: ... on võrdlusskeem, mis sisendisse tulevaid operande võrdleb ning teeb kindlaks, kas esimeses sisendis olev operand on suurem (Great), võrdne (Equal) või väiksem (Less) kui teises olev, aktiveerides vastava väljundi. 11. Koodimuundur: On loogikaskeem, mis teisendab sisendkoodi mingisse teise loogikasse. Näiteks positiivsest loogikast negatiivsesse loogikasse inversiooni läbi. Binary-Decimal. Igale sisendjärgule vastab loogikaskeem, mis toimetab teisenduse. 12. ALU: Aritmeetika-Loogikaseadme ülesandeks on mitmekohaliste kahendarvudega erinevate aritmeetiliste ja loogiliste tehete tegemine. Tehe, mida teha, määratakse juhtsisenditega, operandid andmesisenditega. Iga järgu jaoks arvutatakse väljundi väärtus iseseisvalt. Protsessor
või vanemale kohale. Nihkeregister on tavaliselt universaalne register, ja ta on võimeline teostama kõik mikrooperatsioonid. Selleks on kõik tema järguskeemid omavahel seotud. Nihkeregistrites kasutakse ainult kaheastmelisi (M –S) trigereid või trigereid dünaamilise juhtimisega. Sel juhul garanteeritakse info nihkumine ühe järgu võrra ühe sünkroimpulsi puhul. Muu trigerite tüübi kasutamisel võib juhtuda mitmejärguline nihe. 13. Loendurid. Loenduriks impulsside loendamiseks ettenähtud loogikalülitust. Loendur on register, millesse salvestatud arv sisendile antud signaali mõjul suureneb ühe võrra. Loendurid jagunevad kaheks vastavalt loendamis suunale 1. Summeerivad-loendavad päripidi, 2. Lahutavad-loendavad tagurpidi Loendurid jagunevad sõltuvalt info ülekandmise viisist kaheks vastavalt 1. jada(asünkroone) loendur
TALLINNA TEHNIKAÜLIKOOL ELEKTRIAJAMITE JA JÕUELEKTROONIKA INSTITUUT ROBOTITEHNIKA ÕPPETOOL MIKROPROTSESSORTEHNIKA TÕNU LEHTLA LEMBIT KULMAR Tallinn 1995 2 T Lehtla, L Kulmar. Mikroprotsessortehnika TTÜ Elektriajamite ja jõuelektroonika instituut. Tallinn, 1995. 141 lk Toimetanud Juhan Nurme Kujundanud Ann Gornischeff Autorid tänavad TTÜ arvutitehnika instituudi lektorit Toomas Konti ja sama instituudi dotsenti Vladimir Viiest raamatu käsikirjas tehtud paranduste ja täienduste eest. T Lehtla, L Kulmar, 1995 TTÜ elektriajamite ja jõuelektroonika instituut, 1995 Kopli 82, 10412 Tallinn Tel 620 3704, 620 3700. Faks 620 3701 ISBN 9985-69-006-0 TTÜ trükikoda. Koskla 2/9, Tallinn EE0109 Tel 552 106 3 Sisukord
. aadress saadakse registermälust, sellele lisatakse operandi mõõt & tulemus läheb pinumälu järgmisesse aadressi Autodekrementne adresseerimine – registrist lühike aadress, mille järgi pinumälust operandid (aadressist lahutatakse op. mõõt) & resultaat pinusse Segmenteerimine – kk + aadress segmendis .. kui kõik andmed on ühes mälusegmendis, segmentidevaheline liikumine käsuloenduri abil Indekseerimisega adresseerimine – aadressibaas & indeks + nihe -> kui palju peab edasi liikuma, leidmaks operande, indeksiregister (selles pikk aadress) Baseerimisega adresseerimine – käsukoodiga antakse ainult nihe, aadressibaas asub baasiregistris Baseerimise ning indekseerimisega adresseerimine – nii indeksi- kui baasiregistrid Suhteline adresseerimine – käsukoodiga antakse nihe 5.LCD, LED, OLED ja plasma kuvarid. 6.Dekooder Dekooder - Lülitus, mis on ette nähtud etteantud sisendkoodi muundamiseks soovitud väljundkoodiks.
Salvestatud info säilib ka pärast mälust lugemist toitepinge olemasolu korral kui tahes kaua. Dünaamilised info säilib MOSFET-transistorite lekkevoolu tõttu väga lühikest aega. Info säilitamiseks tuleb laengut perioodiliselt (nt iga 2 ms järel) uuendada. Lihtsama ehitusega. Ühe biti salvestamiseks vaja umbes kaks korda vähem elemente. Aeglasem, kuid tarvitab vähem energiat. 1. LOENDURID Impulsside loendamiseks ette nähtud loogikaskeem. Kasutatakse automaatikaseadmetes ja arvutustehnikas. Sisenditesse püütakse impulsid, väljundiks 0 1 kombinatsioonid. Erinevate väljund kombinatsioonide arvu nim. mooduliks. E-sisend ehk ,,enable" sisend lubab loendamise. Sõltuvalt signaali ülekandeviisist jaotatakse loendurid: Sünkroonsed trigerite ümberlülitumine toimub samaaegselt, ümberlülitusaeg kogu aeg sama. Kõik loenduris olevad trigerid on reguleeritud kellatakti järgi
3. Kuvarid.......................................................................................................................................7 3. PILET.............................................................................................................................................8 1. Dekooder....................................................................................................................................8 2. Käsuformaadid - 0, 1, 2, 3 ja 1,5 aadressiga arvutid. ................................................................9 3. Andmeedastuse juhtimine(bus arbitation): süsteemid katkestustega ja ilma, prioriteedid. ......9 4. PILET.............................................................................................................................................9 1. Summaator: järjestik, paralleel ja kiire ülekanne. .....................................................................9 2. Optilised mäluseadmed.....................
3) Andmete sõltuvus Konveieriga protsessoris tekitab probleeme teineteisele järgnevate käskude andmete sõltuvus. Näiteks registri tulemuse liitmisel kasutatakse vana väärtust, kui konveier ei arvesta andmete sõltuvust, mis muudab tulemuse valeks. Sõltuvus võib olla soetud ka käskude täitmise järjekorraga. 3. Siirete (hargnemiste) ennustamine (Branch Prediction). Strateegiad. Protsessorites on tihti eraldi loogikaskeem, mis tegeleb hargnemiste ennustamisega, et muuta konveier efektiivsemaks uuesti käivitamiste arvelt. Hargnemiste ennustamine toimub statistiliste kriteeriumite järgi ja ei anna alati õiget tulemust, kuid aitab vähendada konveieri uuesti käivitamise tõenäosust. Hargnemine tähendab seda, et järgmise käsu aadress ei tule käsuloenduri väärtuse suurendemisega ühe võrra, vaid käsuloendurisse laetakse täiesti uus väärtus, mis tähendab konveieri taaskäivitamist
A 10011010 B 1011 Toomas Ruuben. TTÜ Raadio ja sidetehnika 78 instituut. 39 Digitaalarvuti komponendid. ALU ALU (Aritmetic Logic Unit) Kujutab endast nn. protsessori südant milles teostatakse põhilised aritmeetika loogika tehted kahe muutuja ehk kahe operaatori vahel. Klassikalised aritmeetikatehted ALU-s: Summeerimine Nihe Korrutamine Jagamine Loogikatehted ALU-s NING (AND) VÕI (OR) Välistav VÕI (XOR) Invertor Toomas Ruuben. TTÜ Raadio ja sidetehnika 79 instituut. Digitaalarvuti komponendid. ALU ALU struktuur A ja B - andmeregistrid R - väljund F - käsukood (instruction) D - Olekusõna Toomas Ruuben. TTÜ Raadio ja sidetehnika 80
I )V I i l J D FQN- st AAglSae{r.r D t} TL0F$.,x. AALDA',JDM0(]T0)ATS6A DV o v r ( * ) d x "s ( X ) = O ( . ) t-.,-^ u(") rb st) * o,&-d {r-.-r"l.,tv'cor^- cl- . _Nt Jrct++ .i q=o JSSf a!-hl v-t As&.rpsl,$.Bt (.rfn,t")a* -!ffln,= J6q-+^s I Nodor^rr r e ("r) o,w l,) l.,o-t.,q4d^L-" = (r) ro-tq^'d a o.- t(') M x )d r + l . l ( 1 ( * ) ) d f u = _ 9=++ t "O t) ! x g'(x& (rt t' t u(,itxt)1'(u)) .tu =e
Tall i n na Teh n i kaUl i kool I nsen_erig raafi ka keskus , KUJUTAVA GEOMEETRIA tl t ,I.JLDKURSUS ., '1" ' HARJUTUSULESANDED , 4F,tZ tc,V/pl @ I i ,:' .f .,i | ;' 't , Uudpitdne lrliA lr e L- "K i uj Opper1hm -- ,t -T t 4 a E_n t I tL
SS.r-i jl i i I i I o ?We0;/^, a-- c-!--*Lo- clon'u!.*0A*n w+*n,*.*.-- " 0 o U0.+U^^- *f^r** /Lp^-,^-;* ^rE^J" U"^!rc-A^/-o- tpt^^,t t- kZzy"a- t^"M^h-r"^' G,tt- y,n**t-aoJ*t bqt'^'&o^---"^t 9 Nt"-"&a^- ".-&J t/^o'14^-^4^4y" Irrnqrlrr'ta!. 0"X^ !Ul^t- wta,Lt*ua*U,v(, g ^ ao -/" U i r/oh-{L la r#a^o!"nd;*. al--& Vou^e..^.!r}nr-),- *.b- N*tAtr"k ,/^o,fur.iaL fv[ nlto^ d, oc< cl'*r,Q'a* . -u H^r,vr;
Otsene operand on mälus kindlas kohas, väärtus võib muutuda aga koht mitte. Käsukoodis on aadress kohe antud. Kaudne käsukoodiga on antud aadressi aadress. Autodekrementne seotud pinumällu kirjutamisega. Osutit vähendatakse nii et see näitaks kõige esimest vaba pesa, kuhu kirjutatakse siis väärtus. Autoinkrementne seotud pinumälust lugemisega. Võetakse osuti esimene väärtus ning suurendatakse seda siis. Baseerimisega on antud baasregistri väärtus nihe, ning nende summast saab aadressi. Indekseerimisega on antud baasaadress ja indeks ning nende summast saab aadressi. Bas + indeks kahe registri summa (ühes baasaadress, teises indeks) Suhteline nihe + käsuloendur Käsuformaadid (0, 1, 1.5, 2, 3) 0-aadressiga: käsukoodis pole aadresse. Põhineb pinumälul: operand saadakse pinumälust ning kirjutatakse sinna. 1-aadressiga: 1 pikk aadress, mis viitab operandi või tulemuse asukohta mälus. 1
2) sünkroonsed(flip-flop) oleku reguleerimine sisendite baasil toimub vaid taktimpulsi mõjul. *Näide trigeri realisatsioonist: RS (reset-set) , R S Qt 0 0 Qt-1 ei muutu 0 1 1 Set 1 0 0 reset 1 1 - keelatu d NB! Keelatud on anda mõlemasse sisendisse signaal 1. *a-sünkroonne * sünkroonne 4. Dekooder[3] *Dekooder on loogikaskeem, mis muundab etteantud sisendkoode neile vastavateks väljundkoodideks. Sisuliselt võtab dekooder sisse kahendsõnumi, desifreerib selle, ning annab konkreetsele sõnumile vastavasse väljundisse (kõrge) signaali. * Tüüpilisel dekooderil on n sisendit ning maksimaalselt 2n väljundit võimalik on jätta mõni 2n väljundist kasutamata. *Dekooderi abil saab kahendkoodi muundada koodiks, millega aktiveerida mälupesa, juhtida segementindikaatorit jne.
Konspekt aines "Elektrotehnika alused" Loeng: Hans Korge Konspekteeris: Siim Hödemann , utrt)lr=r u^x,,q,.,$frryi . I*"tt(I"-{^l-"{" ^'t Wfl 1=ot (=o l"$aq1 ,{.nt,t4 M attY * ,, - i tl"d'& **p,ry q L: tq **; ry' [q t Fi httbq{ frqM rl { *1 $4,q c-f'..;{"{4t*- i*- {ry tir1 *, 11 { / d-1 r '[ F t,) dt,,4 ,t*r'! a,^ n t{.,