EESTI
MAAÜLIKOOLTehnikainstituut
Kiirendus-
ja vibratsioonisensorid
Õppeaines
„Autod- Traktorid II“
TE.0260
Tootmistehnika eriala
TA
BAK 3
Üliõpilane: “…..“………………2015.a …………………………
Juhendaja : “…..“………………2015.a.
…………………...........
Arne Küüt
Tartu
2015Kiirendus-ja
vibratsiooni sensorid
Kui
sõitjal on vaja teada kui kiiresti auto punktist A punkti B liigub,
vaatab ta lihtsalt spidomeetrit. Samas kiirendus on palju huvitavam
ja kasulikum kui
hetkekiirus , sest see näitab ka muud lisaks
kiirusele.
Otseloomulikult on kiirenduse mõõtmine on natuke
keerulisem, kui mõõta kiirust, sest see näitab aja jooksul kiiruse
muutust. Selle mõõtmiseks kasutataksegi
autodes kiirendusmõõturit, mis töötab kiirendusanduriga.
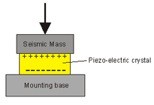
Joonis
1. KiirendusanduridKiirendusandur on laialdaselt kasutatatud inertsiaalsetes
navigatsiooni- ja
juhtimissüsteemides, meie teemal autodes, samuti lennukites ja ka
laevades. Väga levinud kasutamiseks transport on auto
turvapatjadel: kui
kiirendusmõõtur tuvastab äkilise auto kiiruse
muutuse, vahetu kokkupõrge, käivitab see
vooluahela , mis avab
turvapadjad.
Kui
minna natuke lihtsamaks küsimusel kuidas, siis võib öelda, et
arvutatakse Newtoni teise seaduse alusel seotud jõud, mass ja
kiirendus väga lihtsa võrrandi kaudu F=m*a ehk jõud=mass*kiirendus.
Seega mõõdab kiirendusandur kiirendust arvutades kiiruse muudu
jooksul, mõõtes jõudu.
Piesoelektrilised muundurid mõjuvadki otse jõu võrrandist
Piesomuundureid
saab kasutada dünaamiliste (ajas
muutuvate ) jõudude mõõtmiseks
(kuni 104N) ja kiirenduste (kuni 1000 g) mõõtmiseks
vahemikus 0,5 kuni 100 Hz. Kui kasutatakse täiendavalt ühte või
kahte integreerivat elementi, siis võib mõõta
liikumisparameetreid: kiirused või аmplituute.
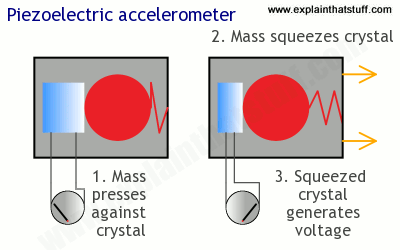
Lihtsamalt
öeldes kui
kiirendusmõõtur liigub, siis mass pigistab
kristall ja tekitab
väikse elektrilise pinge.
Joonis
2. Joonisel on kujutatud Piesoelektriline kiirenduandurPiesoelektriline
kiirendusmõõtur: hall kiirendusmõõturi korpus liigub vasakule,
mass pigistab sininst piesoelektrilist kristalli (pildil
suurendatud ), mis tekitab pinge. Mida
suurem on kiirendus, seda suurem jõud, ja seda suurem on vool, mis
voolab (joonisel nooled)
Kõige
populaarsemad on potentsiomeetrilised
andurid , mis jagunevad omakorda
kaheks, mehaaniliste kontaktidega ja ilms mehaaniliste kontaktideta
potentsiomeetrilised anduri. Esimestel neist on otentsiomeeter
takisti konstantse takistuse väärtusega R p , millel libiseb
liugur , mis moodustab elektrilise kontakti. Liugur on mehaaniliselt
ühendatud uuritava objektiga, mille liikumist tuleb üle
kanda.Takistus R liuguri ja takisti ühe otsa vahel moodustab liuguri
asend ja takisti ehitus. Potentsiomeetriliste andurite takisti võib
olla kas
elektrijuht või voolujuhtiv riba. Kui nendes andurites on
kasutatud õhukest kalibreeritud voolujuhti koos liuguriga, neid
nimetatakse ka reohordmuunduriteks (reohordideks). Kui
voolujuht on
mähitud karkassile, neid nimetatakse reostaatanduriteks.
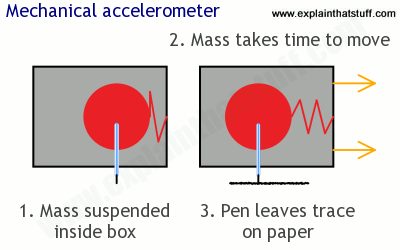
Lihtsamalt
öeldes liigub
mass maha igal kiirendusel ja venib jõuga, mille kaudu saab arvutada
täpse kiirenduse.
Joonis
3. Joonisel on kujutatud mehaaniline kiirendusandurMehaaniline
kiirendusandur: hall kiirendusmõõturi kast liigub
küljelt küljele,
mass jääb teatkud hetkelmaha ja see näitabki kiirendust.
Teised
on mehaaniliste kontaktideta potentsiomeetrilised andurid, mis võivad
põhineda erinevatel efektidel. Nende peamiseke eeliseks on
kontaktpindade hõõrdumise ja kulumise puudumine. Need on
kontaktivabad muundurid.
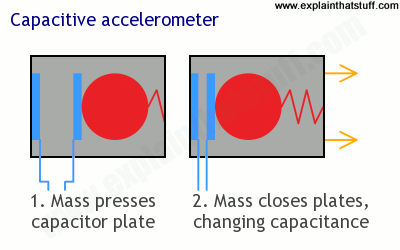
Mahtuvuslikeks
nimetatakse mõõtemuundureid, milles mõõdetav mitte-elektrilise
suuruse muutuse muundatakse mahtuvuse muutuseks.
Joonis
4. Joonisel on kujutatud mahtuvuslik kiirendusandur
Mahutvuslik
lai mõiste mahtuvuslik kiirendusmõõtur: hall kiirendusmõõturi
korupus liigub paremale, punane mass on jäänud kohale ja
surub sinised metallplaadid üksteisele lähemale, muutes oma mahtuvut,
mida saab omakorda mõõta ja sellest tulnevalt arvutada kiirenduse.
Vibratsiooni
sensoriteks kasutatakse kiirendussensoreid. On olemas mitmeid
vibratsioonisensoreid, kuid kõige enamlevinumad on Piesoelektriline
ja Knock-tüüpi vibratsioonisensorid. Piesoelektriline möödab
erinevate laengute liikumist. Kus vibratsioonis andurs olev kristall,
mille mass on teada, hoitakse kompresioonis kus ta perioodiliselt
pressitakse kokku ja lastakse taas vabaks, täpsemat illustratsiooni
on võimalik näha jooniselt 5.
Joonis
5. Joonisel on näidatud , kuidas töötab Piesoelektriline
vibratsiooni andur .Kompressiooni
ajal, laeng kristallis tõuseb ja langeb vastavalt perioodilisele
rotatsioonile. See tekitab eraldi elektrivoolu, mis mille tuvastab
vibratsiooni
sensor . Seda tüüpi sensor suudab töötada kuni 250C
ilma, et temperatuur mõjutaks tema tööd. Ehk lihtsamalt
seletades,
vibratsioon paneb massi kiirendama. Massi liikumisel
tekitab piesoelektriline kristall elektrivoolu, mis edastakse
sensorile mis omakorda tuvastab kui kui kiirelt toimub kiirendus.
Kõik see käib lihtsa valemi järgi F=ma [1]
Knock-tüüpi
vibratsiooni andur mõõdab
silindris plahvatuse jõudu. Tema
tööpõhimõte on sama mis eelnevalt kirjeldatud piesoeletrilise
vibratsiooni omal. Antud andur paigaltatakse mootoriplokki. Silindris
toimunud plahvatuse teel pannakse mass liikuma, mis vibreerides
annab märku kiirendusest piesoelektrilisele elemendile.
Piesoelektriline element tekitab eleketrivoolu, mis viidakse edasi
andurisse. Kui andur tuvastab, et on toimunud vibratsioon, siis ta
viivitab uue kontrollitud plahvatuse tekkimist silindris. Knock tüüpi
vibratsiooni andur töötab üldjuhul sagedusel 5-25 kHz.
Neid
sensoreid kasutatakse eelkõige silindris toimuva plahvatuse kiiruse
reguleerimiseks. Mida kontrollitum on plahvatus, seda täpsema ja
parema töökvaliteedi saab tagada. Samuti kasutatakse sama
põhimõttega sensoreid selleks, et tagada reisijate ohutus. Kui
peaks toimuma liiklusavarii, siis esimesena saab märguande toimunud
kokkupõrkest kiirendusandur, mis omakorda annab käsu järgmistele
anduritele. Avades
õhkpadjad jne.


















Kõik kommentaarid