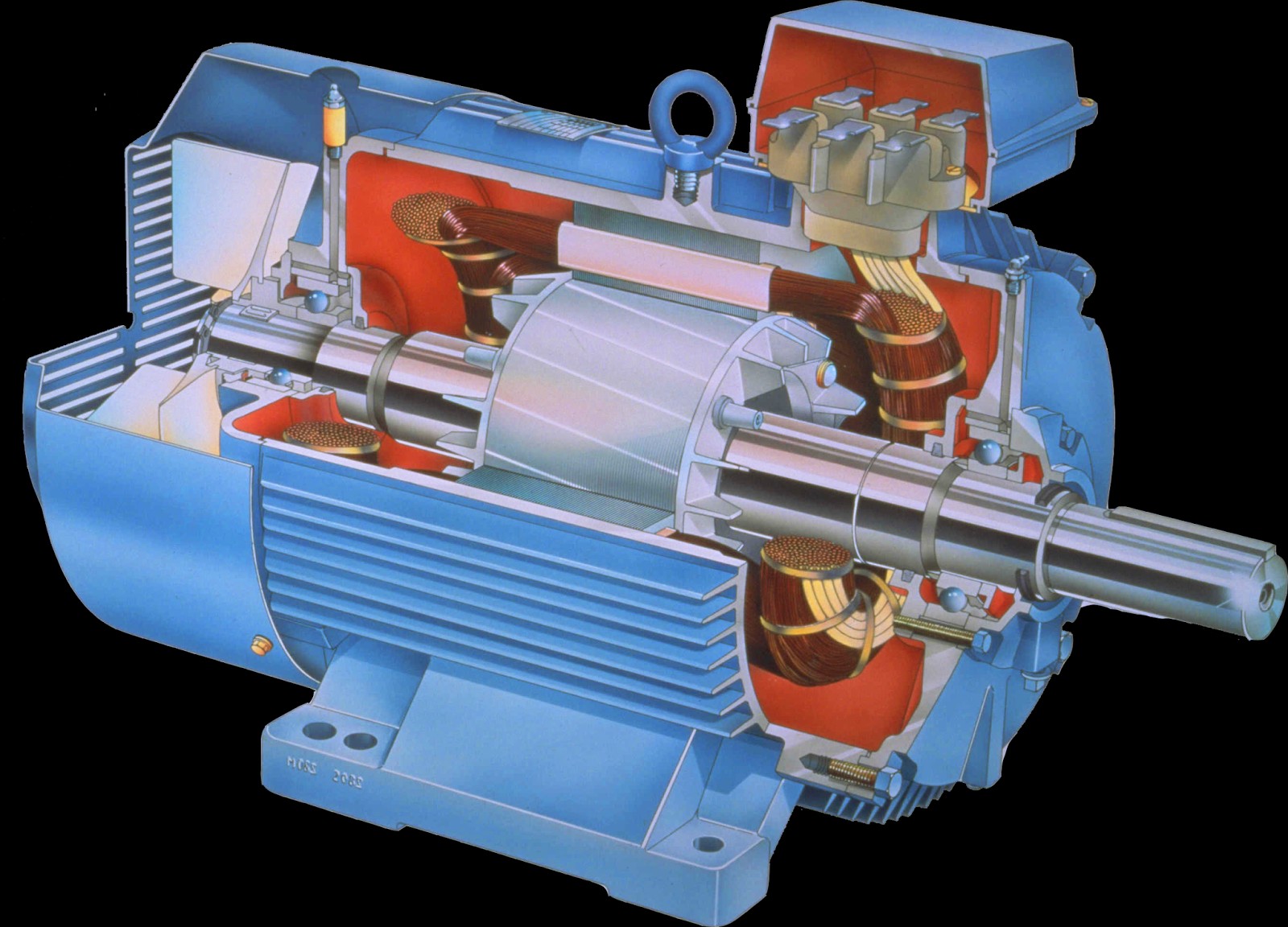
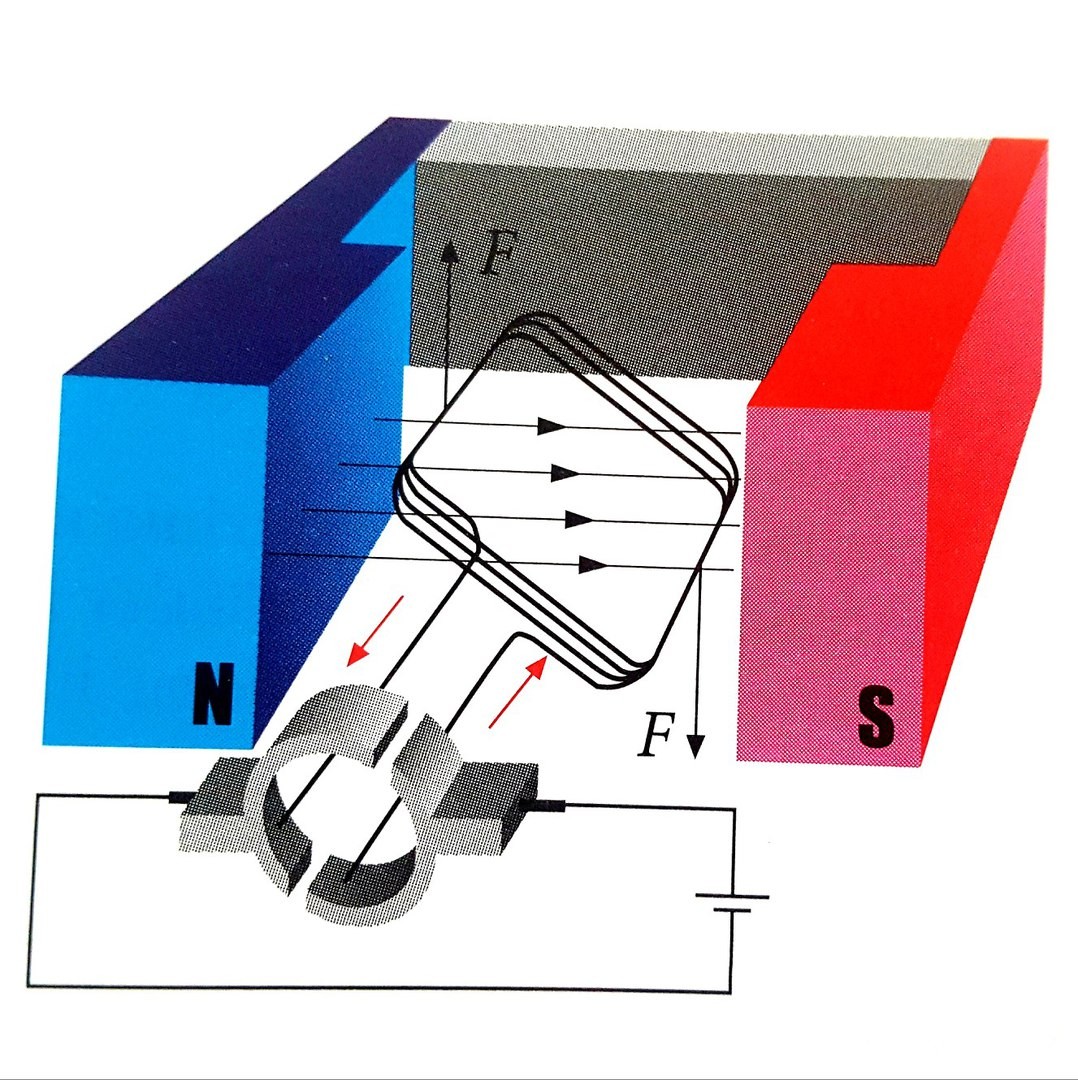
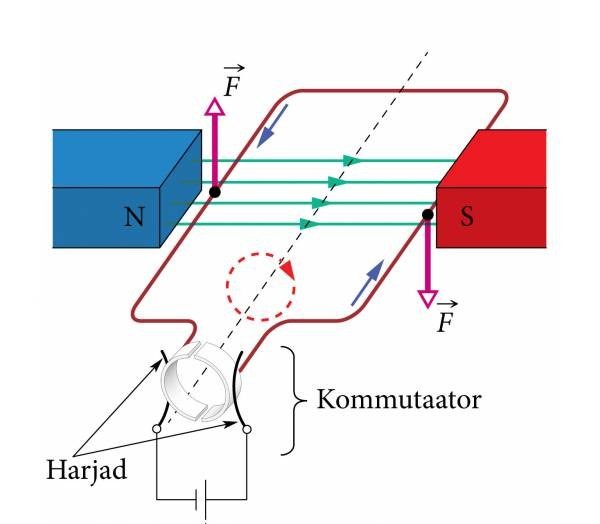
Elektrimootor ja elektrivoolugeneraator Koostanud: Geneli Sonija Elektrimootor Click to edit Master text styles Second level Third level Fourth level Fifth level v Töö põhineb vooluga juhtme ja magnetvälja vastastikmõjul v Magneti pooluste vahele on paigutatud mähisega raam. v Kui tekitada raami mähises elektrivool siis raam pöördub. v Mootoris pannakse mähisega raam pöörlema. v Raam hakkab pöörlema ainult siis kui muuta voolu suunda mähises just sel hetkel , mil raami tasapind on risti magnetvälja jõujoontega v Alalisvoolu elektrimootoris muudetakse voolu suunda mähises kahe poolrõnga abil. v Elektrivool juhitakse mähisesse läbi poolrõngaste vastu surutud grafiitvarraste (m
Elektrivoolu töö on füüsikaline suurus, mis arvuliselt on võrdne juhi otstele rakendatud pinge, voolutugevuse ja töö tegemiseks kulunud aja korrutisega ning sellega iseloomustatakse nii energia suuruse muutumist kui ka energia muundumist ühest liigist teise (A=UIt, A=I²Rt, A=U²/R*t, kus A=elektrivoolu töö (1J), U=pinge (1V), I=voolutugevus (1A), t=aeg (1s), R=elektritakistus (1)). Mõõdetakse kaudsel teel, kasutades voltmeetrit, ampermeetrit ja kella. Elektrivoolu võimsus on füüsikaline suurus, mis on võrdne elektrivoolu tööga ajaühikus ning arvuliselt võrdne pinge ja voolutugevuse korrutisega (N=UI, N=I²R, N=U²/R, kus N=elektrivoolu võimsus (1W)). Mõõdetakse kaudselt voltmeetri ja ampermeetri ning otseselt vattmeetriga. Elektrienergia tarbimises ja müügis kasutatakse voolu töö mõõtmiseks ühikut 1 kilovatt-tund (1 kW * h=1 000 W * 3600 s=3 600 000 J=3,6 * 10²'³ J), mis on mugav, kuna arvestades kasutatavate elektritarvitite nimivõimsust on lihtne pla
Seade, mis moodustab juhttoime u nimetatakse kas juhtseadmeks või ka regulaatoriks. Süsteemile avaldavad mõju sisendid, mis pärinevad väljast poolt süsteemi. Nendeks sisenditeks on seadesuurus s, mis määratleb mida süsteemilt soovitakse ning häiringud nx, mis segavad süsteemi talitlust. Seega alustades kirjeldamist juhtimisobjektist ehk seadmest või protsessist, mida juhtida soovitakse, siis nagu nimigi ütleb on üks komponentidest juhitav seade, näiteks elektrimootor. Sellele seadmele mõjuvad nii juhttoimed kui ka häiringud, mille tulemusena muutub juhtimisobjekti väljund ehk protsessi tulemus. Selleks, et tulemust kontrollida, peab seda mõõtma, mistõttu kuulub juhtimisobjekti koosseisu ka mõõteaparatuur ehk sensor, millele mõjuvad sõltuvalt ehituslikest omapäradest kas juhuslikud või süsteemsed vead. Juhuslikuks veaks võib olla temperatuuri mõju, väliste väljade olemasolu vms. Süsteemsed vead on tingitud aga mõõteriista täpsusest.
Kui omavahel juhtmetega ühendada vooluallikas, elektritarviti(d) ja lüliti, tekib vooluahel. Vooluallikas, elektritarviti, lüliti ja juhtmed on vooluahela osad. Kui vooluahelas lüliti sulgeda tekib vooluring. Vooluring on suletud vooluahel, milles saab tekkida vool. Vooluahelas võib olla mitu vooluringi. Vooluallikas tekitab ja hoiab vooluringi ühendatud juhtides elektrivälja. Tarviti on suvaline seade, mis töötab elektrivooluga. Elektritarvitiks on näiteks elektrimootor, küttekeha, lamp, taskutelefon. Tarvitis muundub elektrienergia mingiks teiseks energialiigiks: mootoris mehaa- niliseks energiaks, küttekehas soojusenergiaks, lambiks soojus- ja valgusenergiaks, telefonis elektromagnetiliseks ja/või helienergiaks. Juhtmed on vajalikud vooluringi osade ühendamiseks. Igal elektriseadmel on juhtmete ühendamiseks vähemalt kaks klemmi. Lüliti on seade vooluringi sulgemiseks ja avamiseks, nii nagu vaja on. Vooluringi avamine
Käigukastid. Astmelised käigukastid liigitatakse: · Hammasülekande tüübi järgi · Võllide arvu järgi · Hammasrataste hambumise viisi järgi · Käiguvahetusmehhanismi järgi · Võllide paiknemise järgi · Käiguvahetuse järgi · Käikude arvu järgi · Nihutatavate hammasrataste arvu järgi Käigud grupeeritakse. Traktoritel jaotatakse: 1. Põhikäigud 2. Transpordikäigud 3. Aeglased käigud Käigukastide üleehitus. Mehaanlised käiguvahetusseadised koosnevad: · Lülituskahvlitest, mis on kinnitatud liugurite külge. Liugureid hoiavad kindlas asendis vedrudega fiksaatorid. Liugurieid liigutatakse käigukangi abil. Traktori jõuülekandesse kuuluvad agregaadid ja mehhanismid, mis kannavad pöördemomendi mootorilt veoratastele (roomikutele) ning muudavad momendi ja pöörlemissageduse väärtust ja suunda. Jõuülekanne edastab seega väntvõlli pöördemomendi käiguosale ja võimaldab pöördemomenti muuta. Traktori jõuülek
1. Punktmassi kinemaatika. 1.1 Kulgliikumine 1.2 Vaba langemine 1.3 Kõverjooneline liikumine 1.4a Horisontaalselt visatud keha liikumine 1.4b Kaldu horisondiga visatud keha liikumine. 2. Pöördliikumine 2.1 Ühtlase pöördliikumisega seotud mõisted 2.2 Kiirendus ühtlasel pöördliikumisel 2.3 Mitteühtlane pöördliikumine. Nurkkiirendus 2.4 Pöördenurga, nurkkiiruse ja nurkkiirenduse vektorid. 3. Punktmassi dünaamika 3.1. Inerts. Newtoni I seadus. Mass. Tihedus. 3.2 Jõu mõiste. Newtoni II ja III seadus 3.3 Inertsijõud 4. Jõudude liigid 4.1 Gravitatsioonijõud 4.1a Esimene kosmiline kiirus. 4.2 Hõõrdejõud 4.2a Keha kaldpinnal püsimise tingimus. 4.2b Liikumine kurvidel 4.3 Elastsusjõud 4.3a Keha kaal 5 JÄÄVUSSEADUSED 5.1 Impulss 5.1a Impulsi jäävuse seadus. 5.1b Masskeskme liikumise teoreem 5.1c Reaktiivliikumine (iseseisvalt) 5.2 Töö, võimsus, kasutegur 5.3 Energia, selle liigid 5.3 Energia
Füüsikaline maailmapilt (II osa) Sissejuhatus......................................................................................................................2 3. Vastastikmõjud............................................................................................................ 2 3.1.Gravitatsiooniline vastastikmõju........................................................................... 3 3.2.Elektromagnetiline vastastikmõju..........................................................................4 3.3.Tugev ja nõrk vastastikmõju..................................................................................7 4. Jäävusseadused ja printsiibid....................................................................................... 8 4.1. Energia jäävus.......................................................................................................8 4.2. Impulsi jäävus ...............................................................
................................................................................ 142 4.3. Regulaatorite ehitus ...................................................................................................... 149 4.4. Mootorite juhtimine ........................................................................................................ 156 5. Elektriajamite juhtimine............................................................................................164 5.1. Elektrimootor ................................................................................................................. 164 5.2. Asünkroonmootorite skalaarjuhtimine ........................................................................... 169 5.3. Asünkroonmootorite vektorjuhtimine ............................................................................. 176 5.4. Sünkroonmootoriga servoajamid............................................................................... 17685 5.5










































Kõik kommentaarid