Eksoskelett Referaat
Egert Pärna
2011
Sisukord
Mis on eksoskelett?
Olemasolevad eksoskeletid
Robot ülikonna HAL kontrollimise
meetodid
BLEEX-i mehhaaniline
disain .
BLEEXi
DISAIN .
Kokkuvõte
Mis on eksoskelett?
Loomariigis – väliskest või
välisskelett
Inimesele kantavat robootikat või
toitega töötavat proteesi
Nii ala kui ka ülakehale
Tehnoloogi mis:
laiendab , täiendab, asendab,
täiustab inimvõimeid ja funktisoone
Vähi eksoskelett ehk kest
Võimendab jäsemete tegevust
Kasutamine:
Ohtlikes töökeskkondades
Taastusravis
Füüsiliste puudega ja
Vanureid abistava seadmena
Rahastav: sõjavägi, meditsiini- ja
tööstusettevõtted.
Eksoskelett HAL 5
Olemasolevad eksoskeletid
UC
Berkeley /Lockheed Martin HULC jalad.
Human
Universal Load Carrier Militaar
rakendus , vähendab hapniku tarvet ja väsimust,
Kaal 24kg +akud, Kasutab Hüdraulikat
Cyberdyne's HAL 5 käed/jalad.
Human
Aitab operaatoril
jalgadega suruda 180kg ja kätega
Universal
pidevalt hoida 40kg.
Load Carrier
5x kehakaalu. Tunnetab elektroodidega nahalt lihastesse
tulevaid impulsse
Peale
parda arvuti akiveeriv vastava mootori, matkides
operaatri li gutust.
Kaal 23kg ülakeha/15kg
alakeha
Tööaeg ühe laadimisega 2h 40min
Kasutab elektrilisi mootoreid
Liisitav
Jaapanis Hybrid Assistive
Limb 5
Olemasolevad eksoskeletid
Honda Exoskeleton
Legs .
Kaal 6.5 kg, Tööaeg 2h
Vanuritela ja ka autotehases
pikkaaega püsti olevatele
inimestele.
Honda
M.I.T. Media Lab's Biomechatronics Group jalad.
Exoskeleton jalad
+ 2W võimsust
+ Vähendab raskust 80%
+ Töötab vedrude ja amortidega
-Tekitas 10% haknikutabe, mida põhjustas
kõnnaku mõjutamine
Edasiarendamisel
M.I.T
ekso . jalad
Olemasolevad eksoskeletid
Sarcos/Raytheon XOS
Exoskeleton käed/jalad.
Üks uuemaid (militaar)
alumiiniumist, hüdrauliline
Suurte raskuste tõstmiseks ja hoidmiseks
-
Toide ja hüdrauliline surve välisest allikast
Kasutamiseks logistikutele
Rex Bionics Rex, Robotic
Exoskeleton Legs.
XOS 2
robootiliste jalgade paar ratastooli
omanikele
Juhitav puldi abil
Aku kestab 2 aktiivset tundi (seismine ja
istumine ei tarbi energiat)
Toetab 60% operaatori raskusest
Müügist saadaval Rex
Center in
Albany-s Uusmeremaal
REX
Robot ülikonna HAL 3 kontrollimise
meetodid
Kasutab müoelektrilisi signaale operaatori
lihase pööramis kavatsuse kohta.
Konfiguratsioon koosneb eksoskeletoni
raamist koos ajamitega põlve- ja
puusa liigeste jaoks
Iga liigese nurk mõõdetakse
liigesele kinnitatud potensiomeetriga.
Vältimaks liigset paindumist ja venitamist on
iga
ajam varustatud
mehhaaniliste piirajatega.
HAL 5
Üm
Ü b
m er
e põlve
lv
e a
su
a va
v te
a
mu
m skli
sk te gru
g pi m
i u
m del.
e
Robot ülikonna HAL
kontrollimise meetodid
Nahale pannakse kaks sensorit, mille abil
juhitakse liigest nagu on näha joonisel.
Sensor koosneb kahest elektroodist ja
instrumentaalsest võimendist.
Kaks painutaja- ja sirutajalihasest tulevat
müoelektrilist signaali filtreeritakse ja
võimendatakse.
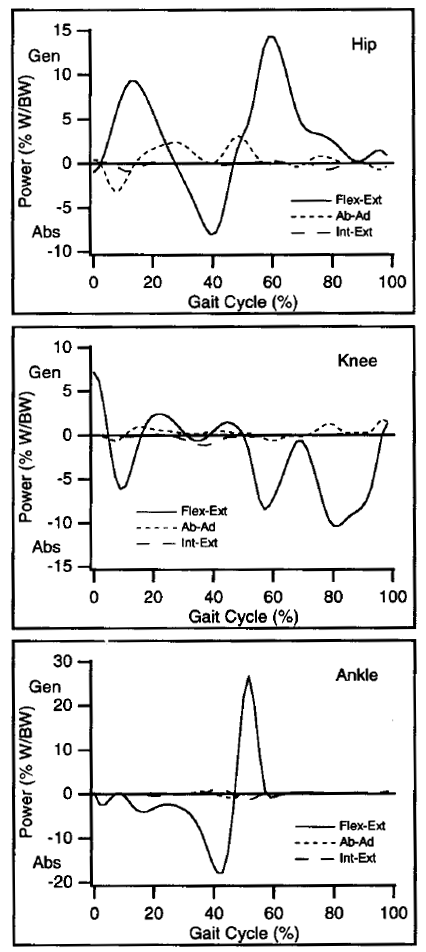
Müoelektri mõõtmine ja töötlemine
Joonisel on näha põlve ümber olev lihasegrupp.
võivad vastavalt tekitada pöördeid ülesse
tõmmete poole, kuid ei suuda neid tekitada
venimis suunas. Sellepärast vajab lihasgrupp
mõlemasse suunda pööretegeneraatorit.
Põlve ümber asuvate
muskligrupide mudel
Berkeley Lower Extremity
Exoskeleton (BLEEX)-i
mehhaaniline disain.
Pseudo-
antropomorfne arhidektuur – See
tähendab, et BLEEX-jalg on kinamaatiliselt pärisjala
sarnane, kuid ei oma kõiki inimese jala DOF
(degrees of freedom )( liikumisvabadus ). 3 vabadusastet puusal
1 aste põlevel
3 astet pahkluul
BLEEX kasutav põhiliselt lineaarseid hüdraulilisi
ajameid nende kompaktse suuruse, kerguse ja
suurte jõudude võimekuse pärast
BLEEX puusa disain
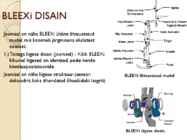
BLEEXi DISAIN
Joonisel on näha BLEEXi üldine lihtsustatud
mudel, mis koosneb järgmisena olulistest
osadest.:
1.) Toitega liigese disain (joonisel) - Kõik BLEEXi
liikuvad
liigesed on identsed, peale nende
kinnituspositsioonide.
Joonisel on näha liigese struktuur. (sensor,
BLEEXi lihtsustatud mudel.
dekoodrit, kaks tihendatud õhusõiduki laagrit)
BLEEXi liigese disain.
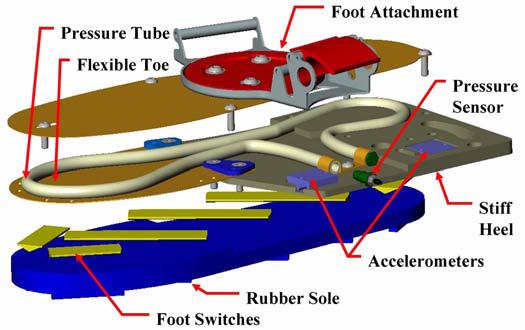
BLEEXi DISAIN
2.)
Jalalaba disain
mõõdab jalalaba kesksurve
asukohta ,
mõõdab inimese raskuse
jaotumist jalgade vahel.
Joonisel on ka näha koormuse jaotumis
andur , hüdraulilist õli täis
olev kummi rõhu toru ja põhiline eksoskeletoni jalalaba
BLEEXi jalalaba disain.
struktuur.
3.)
Sääre ja and reie disain.
Sääre ja reie põhifunktsioonideks on struktuuriline tugi ja
venivuse/painduvuse liigeste ühendamine.
Säär kui ka reis on disainitud nii, et seda saaks
erinevas pikkuses olevatele inimestele
kohandada .
4.) Torso disain
Torso tagumisele küljele on ühendatud toiteplokk, juht arvuti
ja raskuse kinnitused.
Torsole on kinnitatud kaldemõõtur
Kõikide sensorite info kogumiseks ja juht arvutiga (supervisor
I/O moodul ehk SIOM) suhtlemiseks kasutatakse remote I/O
mooduleid ehk RIOMe. Ühendatud torsole
BLEEX torso disain
Kokkuvõte
Videod:
XOS 2 (2:36min)
HAL 5 (1:36)
REX (2:24)
METAL MUSCLES: Carlos Owens of Wasilla
Kasutatud kirjandus
[1] SIM
University , Ng Sze Tat, Design of a lower-limb Exoskeleton for Assistive Mobility
Application , 2010
[2] IEEE spectrum, Erico Guizzo,
Harry Goldstein, „The
Rise of the
Body Bots”
http://spectrum.ieee.org/biomedical/bionics/the-rise-of-the-body-bots/0, 2005
[3]
http://en.wikipedia.org/wiki/Powered_exoskeleton, 2011
[4]
Berkley Robotics & Human
Engineering Laboratory ,
http://bleex.me.berkeley.edu/research/exoskeleton/, 2011
[5] Berkley Robotics & Human
Engineering Laboratory
,
http://www.lockheedmartin.com/data/assets/mfc/PC/MFC_HULC_Product_Card.pdf, 2011
[6]Cyberdyne,
http://www.cyberdyne.jp/english/robotsuithal/index.html, 2011
[7] Honda,
http://www.hondanews.com/channels/149/releases/6033eb61-eee7-5966-d49a-be004c34bc01, 2011
[8] Massachusetts Institute of
Technology , Anne Trafton,
http://web.mit.edu/newsoffice/2007/exoskeleton-0919.html, 2007
[9] Rayethon,
http://www.raytheon.com/newsroom/technology/rtn08_exoskeleton/index.html, 2011
[10] Rex Bionics,
http://www.rexbionics.com/What-is-Rex.aspx, http://www.rexbionics.com/What-is-Rex.aspx
[11] University of Tsukuba , Tomohiro Hayashi, Hiroaki Kawamoto and Yoshiyuki Sankai
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1545505, 2005
[12] University of Tsukuba,
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4108030, 2006
[13] University of Tsukuba,
http://sanlab.kz.tsukuba.ac.jp/sonota/ISSR_Sankai.pdf, 2011
[14] University of
California , Berkeley, Adam Zoss, H. Kazerooni, Andrew Chu,
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1545453&tag=, 2005








































































Kõik kommentaarid