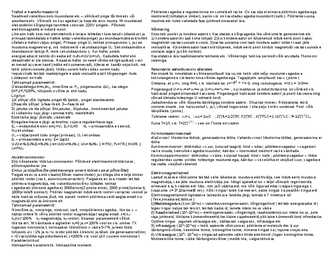
erinevates tööreziimides Sünkroongeneraatori faasordiagrammid erinevates tööreziimides Sünkroongeneraatori faasordiagrammid erinevates tööreziimides Sünkroonmasina (generaatori) faasordiagrammid erinevates tööreziimides a, b töötamine reaktiivvõimsuste kompensaatorina (induktiivne, mahtuvuslik) c - töötamine generaatorina (kui on suurem kui 0, siis on SM generaatorreziimis) d töötamine mootorina nurk nurk EMJ (elektromotoorjõud) ja pinge vahel. nurk nurk voolu ja pinge vahel nurk nurk EMJ ja voolu vahel E elektromotoorjõud U- pinge I vool xd sünkroonmasina mähise takistus Sünkroongeneraatorite paralleeltöö tingimused · Generaatorite pinged on võrdsed · Pinged on samas faasis · Generaatorite sagedused on võrdsed · Faaside järjestus on sama (piltlikult öeldes mõlemate masinate EMJ-d pöörlevad kas vastu või päripäeva)
kaasneb magnetvood, kui staatori mähised on 120 kraadi nihutatud siis megnetvoog on pöörlev. Pöördmagnetväli indutseerib staatori ja rootori mähises EMJ. Kui rootori mähised on suletud tekib nendes vool. Rootori voolu ja pöörleva magnetvooga tekib pöördmoment. Kui arendatav pöördmoment on suurem kui pidurdusmoment hakkab rootor tööle. Asünkroonmootorid on enamkasutatav jõuallikas maailmas, eelkõige mootorina, kus elektrienergia muundatakse mehaaniliseks energiaks pöördemomendi näol. Konkreetsetel tingimustel võib asünkroonmasin töötada ka generaatorina, muundades mehaanilise energia elektrienergiaks. Asünkroonmootor koosneb staatorist, mis on terasplekkidest koostatud õõnessilinder ja mille sisepind on uurestatud. Uuretes paikneb kolmefaasiline staatorimähis pöördmagnetvälja tekitamiseks. Teiseks põhi komponendiks on pöörlev rootor, mis asub võllil, on
Rootori ergutamiseks elektromagnetite abil tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril asuvate kontaktrõngaste. Püsimagnetite kasutamisel sellist vajadust pole. Sünkroonmootori tööpõhimõte: Sünkroonmootori käivitamise eesmärgil on poolusekingades käivitusmähis, mis võimaldab nn.asünkroonset käivitust. **Asünkroonmootorid** Asünkroonmootorid on enamkasutatav jõuallikas maailmas, eelkõige mootorina, kus elektrienergia muundatakse mehaaniliseks energiaks pöördemomendi näol. Konkreetsetel tingimustel võib asünkroonmasin töötada ka generaatorina, muundades mehaanilise energia elektrienergiaks või pidurina, mil mehaaniline ja elektrienergia muunduvad soojuseks masinas. Asünkroonmootor koosneb staatorist, mis on terasplekkidest koostatud õõnessilinder ja mille sisepind on uurestatud. Uuretes paikneb kolmefaasiline staatorimähis pöördmagnetvälja tekitamiseks
Sünkroonmasinad Põhimõisted Sünkroonseks nim. kommutaatorita vahelduvvoolumasinat, mille rootori pöörlemiskiirus on kindlas vahekorras võrgu sagedusega Kuna meie võrgu sagedus on on 50Hz, siis rootori sagedus on rangelt määratud pooluspaaride arvuga (p=1, n=3000, p=2, n=1500, n=3, p=1000 jne.) Sünkroonmasin võib töötada nii generaatori kui mootorina Sünkroongeneraator on põhiline seadeldis elektrienergia tootmisel Sõltuvalt jõuallikast liigitatakse sünkroongeneraatorid hüdro-, turbo- ja diiselgeneraatoriteks a) Hüdro- ja tuuleturbiinid (50 ... 750 p/min, p = 60 ... 4), valmistatakse üksik- ehk väljepoolustega (salient pole) b) Auru- ja gaasiturbiinide pöörlemissagedus n = 3000 p/min, seega p = 1 c) Diiselgeneraatorid (600 ... 1500 p/min)
xC=xL ; L=1/C ; 2fL=1/2fC |*2fC ; 42f2LC=1 |:42LC ; f=1/2 CL, 6)reguleeritavuse järgi: astmeline, sujuva reguleeritavusega Kuna T=1/f, siis T=2 - see on Thomsoni valem 1 endainduktsiooni emj =U1 E1+U1=0 N1 primaarmähise keerud, N2sekundaar U1 väljastpoolt tulev pinge (primaar), U2 sekundaar Kommutaatormasinad Ei primaarmähise emj Ei= /t Alalisvool: Mootorina töötab, generaatorina tööta. Vahelduvvool:Mootorina töötab, generaatorina ei U1/U2=N1Ei/N2Ei=N1/N2 | k=U1/U2=N1/N2 | I2/I1=N1/N2 | I=P/U; Pk=I2R | I=U/R | tööta I2=P/U2 Sünkroonmootor: töökindlus suur, kuluvad laagrid; hind odav; pöörlemissagedus sagedust
on võimalik sujuvalt ning väga laias vahemikus nullist nimiväärtuseni reguleerida momenti ning pöörete arvu ajaühikus. Harjavaba alalismootori allikast juhitakse alalisvoolu mootorit Inverteriga põhiliselt luuakse tänu sellele vahelduvoolu signaal, millega seda juhitakse. Lisasensorid ja elektroonika juhivad ja suunavad inverteri väljundi amplituudi ning laine kuju ja sagedust (nagu näiteks rootorkiirust). Harjavaba alalisvoolumootorit saab kirjeldada põhiliselt samm-mootorina. Peamiselt suure võimsusega harjavabad mootorid on kasutuses elektriautodes ning hübriidautodes. Mootorid on populaarsed mudellennunduses nende võimsuse ja kaalu suhte ning suure suuruste valiku tõttu. Alates viiest grammist kuni suurte mootoriteni, mille võimsus on määratud kW-des, on nad muutnud mudellennundust ja asendanud kõik harjamootorid. Piesoelektriline mootor Seega kasutab piesomootor piesoelektrilist pöördeefekti. Kulg- või pöörlemisliikumise
Selle jõu mõjul tekib magnetväljas liikuvas juhis elektrivool. 3. Milles seisneb elektrimasinate pööratavuse printsiip? Tööd tehes tuleb energiat juurde sellepärast, et mehaaniline energia muundatakse elektrienergiaks. Puhkeolekus elektrienergia muundatakse mehaaniliseks energiaks. See on elektrimasinate (milleks on ka inimene) pööratavuse printsiip. Sõltumata konstruktsioonist ja tööpõhimõttest võib iga masin töötada nii energia generaatorina kui ka mootorina. 4. Mis on elektrimasina põhiosad? Staator on mootori paigalseisev osa. Staator paikneb mootorikeres 1, mis fikseerib kõikmasinaosad omavahel ja millega mootor kinnitatakse tööpingile. Veerelaagrid 2 paiknevad laagrikilpides 3, mis tagab masinaosade kontsentrilisuse. Keres paikneb staatori magnetsüdamik 7, mis on koostatud 0,3...0,5 mm paksustest stantsitud staatoriplekkidest, mis on omavahel isoleeritud. Staatori uuretes on pöördmagnetvälja tekitav kolmefaasiline mähis 8
Induktori poolused on kinnitatud silindrilise terasikke külge, mis on samaaegselt masina kereks kui ka magnetahela osaks. Induktori poolustele on paigutatud ergutusmähised. Ankruks on pöörlemisvõllil asetsev uurestatud silinder, mis on valmistatud elekrotehnilise terase plekkidest. Silindri uuretes on ankrumähis üks või mitu voolu juhtivat pooli. Alalisvoolumasinad on pööratavad üks ja sama seade võib töötada nii generaatori kui ka mootorina (joonised 2A ja 2B). Kui ankur panna mehhaanilise jõu mõjul pöörlema, siis indutseeritakse ankrumähises Faraday elektromagnetilise induktsiooni seaduse kohaselt induktsiooni elektromotoorjõud: dF dY e i = -w =- (1) dt dt ja saame generaatori
gümnaasiumisse. Sellele järgnes Polütehnikumi instituut Graz'is, Austrias ja Praha ülikool. Alguses ta kavatses pühendada ennast füüsikale ja matemaatikale, kuid peagi ta hakkas huvi tundma elektrist. Ta alustas oma karjääri elektriinsenerina telefoni firmas Budapestis aastal 1881. (teslasociety, 2012) Polütehnikumis Tesla hakkas õppima mehaanika ja elektri kunsti. Üks päev füüsika õpetaja näitas Nikolale uut Gramme dünamot, mida saab kasutada nii mootorina kui ka generaatorina. Pärast natuke aega selle jälgimist, Tesla pakkus, et võib kaotada ebavajalikud sädemetega ühendused ehk kommutaatorid. Proffesori arvates oli see hea idee ja tema arvates oleks see olnud justkui lakkamatu liikuva masina ehitamine. Isegi Tesla ei oleks suutnud loota selle läbi viimist. Järgmised aastad oli see idee Tesla igapäevaste mõtete seas. Ta soovis sellele leida lahenduse. Ta teadis, et võti on kuskil vahelduvate elektrivoolude juures. Ta ei leidnud
terasplekist, nende otste kuju tagab ergutusmähise hea kinnituse ja magnetvoo soovitava joatumise pooluuste ja ankru vahelises õhkpilus. Ergutusmähise otsad on toodud klemmplaadile. Kere otsetesse kinnitatakse poltidega laagrikilbid. Ühe laagrikilbi siseküljele on kinnitatud harjahhoidikud koos harjadega, mille küljest suunduvad painduvad vaskjuhtmed masina klemmiplaadile. Alalisvoolumasinad on pööratavad nagu sünkroonmasinadki, st neid võib kasutada generaatori ja mootorina. Ankrumähis koosneb paljudest sektsioonidest, mis on kommutaatorilestade kaudu omavahel ühendatud ja moodustavad kinnise ringmähise. 37. Alalisvoolumootorid: ehitus, tööpõhimõte, mehhaaniline karakteristik, käivitamine, reverseerimine Alalisvoolumootoreid kasutatakse elekterveonduses ja mitemesuguste tööpinkide ajamites, autodes jm. Magnetväli tekitatakse alalisvoolumasinas poolustega. Poolused on kas püsimagnetitest või tekitatakse elektrivooluga ergutusmähistes
tekitamine. Asünkroonmootor on oma nime saanud selle järgi, et rootori pöörlemiskiirus erineb magnetvälja pöörlemiskiirusest ehk sünkroonkiirusest. Staatorimahisest, tapsemini oeldes, tema poolusepaaride arvust, soltub mootori poorlemis kiirus. Magnetvalja poorlemiskiirus (seda nimetatakse ka sunkroonkiiruseks) 0 soltub nii sagedusest f kui ka poolusepaaride arvust p: 45. Alalisvoolumootorid. Alalisvoolumasin võib töötada nii mootorina kui ka generaatorina. Seega on alalisvoolumasinale iseloomulik pööratavuse omadus. Kui viimane lülitada alalisvooluvõrku, siis ergutus ja ankrumähist läbib vool ning ankur hakkab pöörlema. Ergutus ja ankrumähise poolt moodustatud magnetväljade vastastikuse mõju tulemusena hakkab mootori rootor pöörlema, kuna ankrumähisele mõjub elektromagnetiline moment M. See moment ei ole pidurdav, nagu on alalisvoolugeneraatoris, vaid on pöörav.
konkurentsieelise kindlustamiseks. See tähendab, et ka IT strateegia (s.o põhimõtted, arengusuunad ja strateegilised tegevuskavad, kuidas ettevõte ITd rakendab) peab olema tihedalt seotud äristrateegiaga. Paljudes ettevõtetes puudub formuleeritud IT strateegia üldse või ei ole ta seotud äristrateegiaga. endastmõistetavalt piirab see oluliselt võimalusi kasutada ITd äri edasiviiva mootorina ja viib IT-spetsialistide ja ärijuhtide võõrandumisele üksteisest. Põhiküsimus on: kuidas meil õnnestub saavutada koostöö ärijuhtide ja IT spetsialistide vahel, et luua tulevikuettevõtted, kus ühendatakse ettevõtte tegevusalane oskusteave ja tehnoloogiapotentsiaal ning kus IT investeeringute tasuvus on suurim. A.2.1.3 Seostada infotehnoloogia strateegia äriplaaniga. Relate IT strategy with business processes.
Mille poolest erineb graampos ja neg viburite basaalkeha?? Graamneg kaks paari kettaid, graampos ainult sisemine. Lisaks sisemistele ketastele esinevad graamneg. bakteritel ka välimised kettad: P (periplasma) ja L (LPS) ketas. Need välimised kettad ilmselt ei pöörle, vaid stabiliseerivad telgvarrast. Viburi basaalkeha ehitus gramnegatiivsetel bakteritel. Sisemist ketast ümbritsevad rakumembraanis paiknevad Mot valgud, mis toimivad kettaid pöörlemapaneva mootorina (moodustavad ioonkanali) ja nendega on seotud Fli valgud, mis võimaldavad muuta viburi pöörlemise suunda. 3.Kuidas saab bakter liikumissuunda muuta? Mööda kõverjoont sujuvalt liikuda ei saa, bakteri liikumine käib piki sirgjoont, liigub edasi, seiskab viburi ja pöörab ümber pannes teistpidi pöörama. Hakkab liikuma. Tambling (kukerpallitamine) - liikumise suuna iseloomustamiseks.Liikumise suunda muudetakse parema
põtkurid. Ökonoomsus - on kütuse erikulu ja kasuteguri suhe.Kütuse erikulu arvestatakse g/1kw h. Kasutegur näitab, et kui palju energiat muudetakse kasulikuk tööks 8.Diiselmootori liigitamine tööprotsessi ja kasutusotstarbe järgi. Kasutusotsarbe järgi: 1.Peadiiselmootor (peamasin) mille otstarve on leava edasi tagasi käikuvuse tagamine. 2.Abidiiselmootor(abimasin)generaatoritel. 3.Autonoomsed diiselmootorid - kasut nt kantavate pumpadekäivitamiseks,päästepaatide mootorina. Tööprotsessi järgi-jagunevad diiselmootorid nelja-ja kahetaktilisteksmootoriteks: 4.taktilises diiselmootoris toimub töötsükkel igas silindris 4 takti e väntvõlli kahe täispöörde jooksul (720kraadi) jooksul 2.taktilises diiselmootoris toimub toimub töötsükkel igas silindris 2 takti e väntvõlli ühe täispöörde (360 kraadi) jooksul.Sel põhjusel arendavad kahetaktilised mootorid muude parameetrite samasusel ligi kaks korda suuremat võimsust
5. Bifilaarne mähis. 6. Kuidas saab muuta kondensaatormootori rootori pöörlemise suunda? 7. Kas saab ühefaasilist asünkroonmootorit käivitada kui selle käivitusmähises, aktiivtakistis või kondensaatoris on rike, kuid töömähis on korras? 8. Ekraneeritud poolustega mootor. 9. Kahefaasiline asünkroonmootor. 10.Õõsrootoriga mootor. 66.Alalisvoolumootor 1. Kas üht ja sama alalisvoolu masinat võib kasutada nii generaatori kui mootorina? 2. Alalisvoolumasinad. Alalisvoolumasina ehitus ja tööpõhimõte. 3. Kuidas alalisvoolumasinad jagunevad? Teha skeemid. 4. Kuidas ühendatakse alati ankrumähise lõpp ja lisapooluste algus? Põhjenda. 5. Milleks on alalisvoolumootoril kommutaator? Kommutaatori ehitus. 5. Kuidas liigitatakse alalisvoolumootorid selle järgi, kuidas on omavahel ühendatud masina ankru- ja ergutusmähis? 6. Jadaergutusega ehk peavoolumootor, teha skeem. Millistel
ja dioodist VD2. Juhul kui mootori induktiivsus on lülituse töötamiseks liiga väike, võidakse lisada täiendab induktiivsus ML, mis toimib ühtlasi ka voolu siluva elemendina. Teise osa moodustab pinget tõstev impulsstabilisaator, mis koosneb dioodist VD1, pooljuhist PL1 ja ajami ahelast. See osa töötab tavalisega võrreldes vastupidi, st. siis kui me soovime ajami pidurdamiseks juhtida energiat tagasi võrku. Mootorina töötamisel sõltub mootori pinge ja pöörlemiskiirus pooljuht lüliti PL2 lülitamisest. Kusjuures induktiivsusesse salvestatud energia juhitakse PL2 suletud oleku korral läbi dioodi VD2 mootorile, ning ei muutu mootori reziimist ei pinge ega voolu suund. Pidurdamiseks on PL2 ja selleks et pidurdusenergia siirduks ajamist võrku peab muutuma voolu suund ja see saab juhtuda siis kui mootori pinge on sisendpingest kõrgem, ning avatakse diood VD1.
Hüdromootor on seade, mis muudab vedeliku rõhuenergia mehhaaniliseks energiaks. Hüdromootorid võimaldavad tekitada edasitagasiliikumist (hüdrosilindrid) kui ka pöörlemist (hammasratas- või kolbaksiaalhüdromootor). Hüdropumbad ja mootorid on samasuguse konstruktsiooniga, see tähendab, et kui veetakse tema võlli ringi välise jõuallika poolt töötab seade pumbana ja kui temasse juhitakse suure rõhu all olevat õli siis töötab ta mootorina. Pumbas muudetakse mehaaniline energia hüdrauliliseks. Põhiliselt kasutakse masinatel hammasratas- ja kolbpumpasid. Vähem on levinud siiber e. labapum- bad. Tööpõhimõte: Rootorpumbad on pöörlevate tööorganitega mahtpumbad. Imi- ja survepoolt lahutab tööorgan. Et klappe pole ja tööorgan pöörleb, ei ole inertsjõude, ning pöörlemissagedus võib olla suur. Pump ühendatakse otse mootoriga ning võtab vähe ruumi
voolugeneraatori elektriliste ja magnetiliste protsessid^ pöör ata vusest: ankru käitamisel kõrvalise jõuga töötab masin generaatorina; kui ankru- ja ergutusmähisesse juhi- takse voolii näiteks akust, töötab ta mootorina. Joonisel 40 on kujutatud generaatorkäiviti RC-1 peami- sed osad ja lülitusskeem. Ankru kahekihiline mähis on paigutatud mootori hooratta pöia uuretesse; pöid on teh- elektrömotoorjõud (emj.). Pööfisvoolude vältimiseks on tud trafoterase lehtedest. Ankrumähise sektsioonide otsad
ühesuunalised, teisel juhul võib muutuda koormuse pinge suund muutumatu voolu suuna korral ja kolmandal juhul võib muutuda koormusvoolu suund muutumatu pinge suuna korral. Reeglina on mootorile vajalikud kahe- ja neljakvadrandilised muundurid, mis omavad jõuahelat pidurdusenergia vastuvõtmiseks ja hajutamiseks. Kuni mootori klemmidele on rakendatud toitepinge, tekitab see võimsuse (ka voolu) läbi alaldi, mis võib olla kahesuunaline, võimaldades masinal töötada nii mootorina kui generaatorina ning pöörelda ühes või teises suunas. Siin ongi põhjus, miks nõutakse neljakvadrandilisi süsteeme, kui koormuspinge ja koormusvool on kahesuunalised. Mootori talitlus pöörlemissuunaga "edasi" kujutab endast esimest kvadranti positiivse pinge ja vooluga. Edasisuunas pööreldes võib masin aeglustuda (pidurduda), muutudes mootorist generaatoriks, kus võimsus muudab suunda positiivse pinge ja negatiivse voolu korral, nagu on näidatud kvadrandis 2