1.Määramispiirkond = katkevuskohad 2.Nullkohad X 0 : y=0 murru korral mõlemad osad 0-ga võrduma -¿ <0 murru korral korrutiseks ¿ 3.Pos/neg piirkond +¿ : y >0 X + joonis X¿ 4.Ekstr.kohad X e : y ´ =0 , murru korral ülemine osa nulliga võrduma 5.Ekst.punktid- asendad ekstr. kohad alg v-sse 6.Kasvamine/kahanemine X : y ´ > 0 X : y ´ < 0 murru korral korrutiseks+ joonis ,max,min ekstr. 7. Käänukoht X K = y ´ ´ =0 murru korral ülemine osa 0-ga võrduma 8.Käänup. asendad käänukohad algv-sse 9.Kumerus/nõgusus X : y ´ ´ < 0 X : y ´ ´ > 0 murru korral korrutiseks + joonis pos-nõgus, neg- kumer 10.Asümptoodid: PA-katkevuskohad f (x ) b1,2 = lim [ f ( x )-kx ] KA- y=kx+b k =xlim ± x x ± Määramisp...
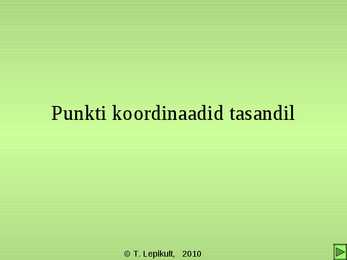
Punkti koordinaadid tasandil © T. Lepikult, 2010 Ristkoordinaatteljestik Punkti asukoha määramiseks tasandil kasutatakse kõige sagedamini kaht ristuvat arvtelge, mille nullpunktid ühtivad. Neid telgi nimetatakse sealjuures koordinaattelgedeks ning nad jagavad tasandi neljaks veerandiks. Koordinaattelgedega varustatud tasandit nimetatakse koordinaattasandiks. y II I 1 0 1 x abstsisstelg IV (x-telg) III ordinaattelg (y-telg)
38. juhtsüsteemi liigitus: Töömehhanismi liikumise järgi, Interpolaatori tüübi järgi, Programmi võimaluste järgi, Programmi lause kuju järgi, Informatsiooni kodeerimise koodi järgi, Juhtprogrammi infokandja järg, Korrektsioonide andmise võimaluste järgi, Tööreziimide järgi, Juhtsüsteemi mälumahu järgi . 39. töömehhanismide järgi liigitus: Täisnurkne juhtimine, Positsioonjuhtimine, Lineaarne juhtimine, Kontuurjuhtimine. 40. Liikumine toimub paralleelselt või risti koordinaattelgedega (Töömehhanism liigub ettenihkel korraga ühe telje suunas). 41. silindriliste pindade treimine, freesimine paralleelselt telgedega. 42. Liikumine toimub tasapinnal või ruumis positsioneerimisega igas punktis, lõikeriista liikumise trajektoori ei kontrollita. 43. puurimine, punkkeevitus, lehtmaterjali töötlemiskeskused augustamisel. 44. Liikumine toimub mööda sirget (Töömehhanism liigub ettenihkel korraga kahe telje suunaliselt). 45
14. - 2 : 2 y - 4 y - 16 y - 3 y - 4 15. Kolmnurga tippudeks on punktid (-6; 3); (2; -3) ja (4; 6). Joonesta antud kolmnurk koordinaatteljestikus. Joonesta mediaanid ja leia jooniselt mediaanide lõikepunkti koordinaadid. 16. Joonesta funktsioon y = -2x + 4 graafik. Kirjuta välja graafiku ning koordinaattelgede lõikepunktide koordinaadid. Leia punkt, mille ordinaat on 6. 17. Joonesta funktsiooni y = x 2 -1 graafik. Leia lõikepunktid koordinaattelgedega ja punk, mille abstsiss on -2. 18. Joonesta ühes ja samas teljestikus lineaarfunktsiooni y = x + 2 ja ruutfunktsiooni y = -x 2 + 4 graafikud. Tähista lõikepunktid tähtedega ning leia jooniselt nende punktide koordinaadid. 19. Joonesta ühes ja samas teljestikus lineaarfunktsiooni y = - x - 2 ja ruutfunktsiooni y = x 2 - 4 graafikud. Tähista lõikepunktid tähtedega ning leia jooniselt nende punktide koordinaadid. 20
telge üheaegselt. See on oluline, et saavutada üheaegne telgede liikumine on töömehhanismide liikumiskiirused teiste telgedega/proportsionaalselt ära jaotatud. Juhtsüsteemis olev interpolaator arvutab arvuti abiga teljed nii, et lõikeinstrument liigub programmi järgi määratud positsiooni ja määratud ettenihkekiirusega. Interpolaator jagab liikumise lõigud lähtepunktist kuni lõpp-punktini paralleelselt koordinaattelgedega sammudeks või ringjoone puhul lõikudeks, luues täiendavaid tugipunkte. Interpoleerimissamm on määratud pingi juhtsüsteemi diskreetsusega (minimaalse nihutuse pikkus) ja detaili töötlemise täpsusega. Kui juhtsüsteem on ilma interpolaatorita, siis lõikeriista liikumine on võimalik ainult kas koordinaatidega kindlaks määratud positsiooni või sirgjooneliselt CNC- PINGI PLUSSID JA MIINUSED
Kordamine III(sirge, ringjoon, parabool, vektor) 1. On antud kolmnurk tippudega A(1;2), B(4;3) ja C(2;5). Leidke sirgete AB ja AC võrrandid ning lõikepunktid koordinaattelgedega; 2) Leidke läbi tipu C joonestatud küljega AB paralleelse sirge võrrand; 3) Leidke läbi tipu C joonestatud küljega AB ristuva sirge tõus. 2. Lõik otspunktidega on ringjoone diameetriks. Leidke: 1) ringjoone võrrand; 2) sellele ringjoonele punktides (2,5; 4,5) ja (0;2) joonestatud puutujate võrrandid ja nende puutujate lõikepunkt. 3. Tuletage joone võrrand, kui joone iga punkti kaugused punktidest M(0;-3) ja N(2;3) on võrdsed.
sellest lahutama? Pidage meeles, et kui suunaparand on ida pool (nagu Eestis), tuleb direktsiooninurga saamiseks suunaparand magnetasimuudile liita. 1. Sättige direktsiooninurga väärtus tuhandikes kompassi skaalal kohakuti suunanoolega. 2. Asetage kompassi alusplaadi pikem serv vastu teie vaatlusposti positsiooni kaardil. 3. Pöörake kompassi vaatlusposti suhtes, kuni paralleeljooned on paralleelsed kaardi kilomeetervõrgu põhjast lõunasse kulgevate koordinaattelgedega. 4. Vaatluspostist mööda kompassi serva tõmmatud joon näitabki vaenlase suunda. Click to edit Master text styles Second level Third level Fourth level Fifth level DIREKTSIOONINURGA MÕÕTMINE 1. Tõmmake joon vaatluspostist objektini. 2. Asetage kompassi alusplaadi pikem serv sellele joonele. Suunanool peab osutama suunas, mille
Fookuste vahelist kaugust tähistatakse F1+F2=2c. Ellipsi punkti kauguste suummat fookustest tähistatakse 2a. Kui on punkt M(x;y), siis selle kaugus fookustest MF1+MF2=2a. Ellipsi kanooniline võrrand: (F1(-c;0), F2(c,0) Ellipsi fookuste vahekauguse suhet ellipsi suure telje pikkusesse nimetatakse ellipsi eksentrilisuseks (tähistatakse e). ; 0e<1 Ellipsi omadused: · Ellips on sümmeetriline x-telje, y-telje ja koordinaatide alguspunkti suhtes. · Ellips lõikub koordinaattelgedega neljas punktis. · Ellips paikneb ristkülikus, mis on piiratud sirgetega. x=-a; y=-b; x=a; y=b. Ellipsi telgeteks on 2a (suur telg) ja 2b (väike telg). a- pikem pooltelg; b- lühem pooltelg. Hüperbool Hüperbooliks nim tasandi nende punktide hulka, mille kauguste vahe tasandi kahest antud punktist on absoluutväärtuselt konstantne. Neid kahte punkti nim fookusteks. Fookuste vahelist kaugust tähistatkse 2c. F1(-c;0), F2(c,0). Definitsioonis mainitud absoluutväärtust tähisttakse 2a
loetakse konstantseks. Integreerides saadakse argumendi x pidev funktsioon: . Seda funktsiooni integreerime x järgi rajast a kuni rajani b: . Tulemuseks saame mingi arvu. Kahekordse integraali arvutamine kaksikintegraali abil: Pideva funktsiooni f(x,y) kahekordne integraal üle regulaarse piirkonna D võrdub selle funktsiooni kaksikintegraaliga üle sama piirkonna D (eeldame, et piirkond D on piiratud joontega Tõestus. Jaotame piirkonna D koordinaattelgedega paralleelsete sirgete abil n regulaarseks (täisnurkseks) piirkonnaks (2) Teisendame seda summat, rakendades iga liidetava suhtes kaksikintegraali kohta käivat keskväärtuse teoreemi . Võrdus (2) saab kuju , (3) Kus Pj on osapiirkonna sj mingi punkt. Võrduse parem pool on funktsiooni f(x,y) integraalsumma üle piirkonna D. Kahekordse integraali olemasolu teoreemist järeldub, et kui
2. Interpolaatori tüübi järgi 3. Programmi võimaluste järgi 4. Programmi lause kuju järgi 5. Informatsiooni kodeerimise koodi järgi 6. Juhtprogrammi infokandja järgi 7. Korrektsioonide andmise võimaluste järgi 8. Tööreziimide järgi 9. Juhtsüsteemi mälumahu järgi Töömehhanismi liikumise järgi · Täisnurkne juhtimine · Positsioonjuhtimine · Lineaarne juhtimine · Kontuurjuhtimine Täisnurkne juhtimine Liikumine toimub paralleelselt või risti koordinaattelgedega (Töömehhanism liigub ettenihkel korraga ühe telje suunas). Rakendus: silindriliste pindade treimine, freesimine paralleelselt telgedega. Positsioonjuhtimine Liikumine toimub tasapinnal või ruumis positsioneerimisega igas punktis, lõikeriista liikumise trajektoori ei kontrollita. Rakendus: puurimine, punkkeevitus, lehtmaterjali töötlemiskeskused augustamisel. Lineaarne juhtimine Liikumine toimub mööda sirget (Töömehhanism liigub ettenihkel korraga kahe telje suunaliselt). Rakendus:
loetakse konstantseks. Integreerides saadakse argumendi x pidev funktsioon: . Seda funktsiooni integreerime x järgi rajast a kuni rajani b: . Tulemuseks saame mingi arvu. Kahekordse integraali arvutamine kaksikintegraali abil: Pideva funktsiooni f(x,y) kahekordne integraal üle regulaarse piirkonna D võrdub selle funktsiooni kaksikintegraaliga üle sama piirkonna D (eeldame, et piirkond D on piiratud joontega Tõestus. Jaotame piirkonna D koordinaattelgedega paralleelsete sirgete abil n regulaarseks (täisnurkseks) piirkonnaks (2) Teisendame seda summat, rakendades iga liidetava suhtes kaksikintegraali kohta käivat keskväärtuse teoreemi . Võrdus (2) saab kuju , (3) Kus Pj on osapiirkonna ∆sj mingi punkt. Võrduse parem pool on funktsiooni f(x,y) integraalsumma üle piirkonna D
Topograafia Kompass. 1 Kompass Kompassi kasutatakse kaardi orienteerimiseks, ilmakaarte määramiseks ja vajalikus suunas liikumiseks. KOLM PÕHJASUUNDA On olemas kolm erinevat põhjasuunda. 1. Tõeline põhjasuund. 2. Kilomeetervõrgu põhjasuund. 3. Magnetiline põhjasuund. 3 · Tõeline põhjasuund on suund teie asukohast põhjapooluseni. 4 Kilomeetervõrgu põhjasuund. Kilomeetervõrgu põhjasuund on põhjast lõunasse kulgevate koordinaattelgede suund kaardil 5 Magnetiline põhjasuund. · Magnetiline põhjasuund on suund, millele osutab kompassinõela põhjapoolne ots. Magnetilist põhjasuunda määrataksegi magnetkompassi abil. · Magnetiline põhjapoolus ei asu mitte geograafilisel poolusel, vaid sellest ligi 1500 km lõuna pool, Kanada ranniku lähedal Ba...
tasandi suunalisi vektoreid nimetatakse tasandi suunavektoriteks.Tasandi üldvõrrand A(x-xo)+B(y-yo) +C(z-zo)=0. Kahe tasandi vahelise nurga arvutamiseks piisab nende normaalvektorite vahelise tervanurga arvutamisest. Tasandi ja sirge vahelise nurga all mõistetakse sirge ja selle tasandile võetud projektsiooni vahelist nurka: see on tasandi normaali ja sirge suunavektori vahelise nurga täiendnurk. Arve a, b ja c nimetatakse telglõikudeks. Telglõgud näitavad, kus tasand lõikub koordinaattelgedega. Nende abil on võimalik saada ettekujutus tasandi paiknemisest ruumis: kui tahame joonistada tasandit, siis on selleks sobivaim kuju võrrand telglõikudes. Sirge ja tasand kui alamruumid Ruumi Rn ühe võrra madalamat alamruumi Rn_1 nimetatakse hüpertasandiks. Sirge R1 on ruumi R2 hüpertasand ja tasand R2 on ruumi R3 hüpertasand. II järku jooned. Teist järku joone saab esitada üldvõrrandiga Ax2 +Bxy+Cy2+Dx+E+F=0,kus vähemalt üks kordajatest A, B või C0
Suunatuletise tõlgendus. Leiame funktsiooni f(x) tuletise punktis a vektori s suunas. Vektori s suunaline ühikvektor on kujul n := s / s2 = (cos , ... , cos n), kus k on nurgad vastavate koordinaattelgedega. Et kasutada eelnevat tulemust, defineerime ühe muutuja funktsiooni kujul u(t) Mitmemuutuja funktsiooni osatuletised ja nende tähistus. := f(x(t)), kus xk(t) := ak + tcos k ja x'k(t) := sk / s2 = cos k. Seega suunatuletis on esitatav kujul df/ds(a) = lim (t->0) (f(a + Vaatame funktsiooni u = f (x1, . . . , xn) punktis P(x1, . . . , xn)
mis tahes koordinaatpinna kaldprojektsioon, kus ekraaniksv6etaksexy- 34 oleva ringjoone kujutisellipsi pooltelgede a= 1,22r ja b = 0,71r graafiliseksmddra- miseks.Joonis6.5,b aga nditabsamaaksono- meetria liigi konal k6igil koordinaatpindadel asetsevate ringjoonte kujutisellipseid, joonestatuna koordinaattelgedega paralleel- ja sete kaasdiameetrite pooltelgedejArgi. Ellipsi kuju tdpsustamisekssaab kasutada kaasdiameetriteotspunktidesolevaid ellipsi puutujaid, mis tihendatuna moodustavad rombi. Joon.6.7 Joon.6.8 Joonistel6.7 ja 6.8 on ndidatudkoordinaat- pindadelolevateringjoontekujutisedfrontaal-
kinnitab eksperimendi kooskõla teooriaga. Siinkohal märgime, et katsepunktid tuleb kanda täpselt graafikule, neid ei tohi nihutada, sest see on objektiivne informatsioon. Küll on suhteliselt vaba kõvera joonistamine, sest see on katsetaja poolt antud tõlgendus katsetulemustele. Graafiku telgedel tuleb näidata sinna kantud suurused koos mõõtühikuga. Tähelepanu tuleb pöörata mastaabi ehk mõõtkava valikule. See peab olema selline, et graafik kasutaks maksimaalselt ära koordinaattelgedega määratud pinna. Graafiku x-teljele kantakse suurus, mis on nähtuse põhjuseks, y-teljele aga suurus, mis kirjeldab tagajärge. Näide. Kui uuritakse läbitud teepikkuse sõltuvust ajast, siis x-teljele kantakse aeg, mitte teepikkus, sest teepikkus oleneb liikumise ajast, mitte vastupidi. Katseandmete kasutamine ehk andmetöötlus viiakse tavaliselt läbi enne graafiku joonistamist. Andmetöötlus seisneb otsitava suuruse arvutamises, selle keskväärtuse
koordinaattelgi, alternatiive kujutavad aga selle ruumi punktid. Tulemiseks võimalik koostada kahemõõtmeline alternatiivide ruum (antud juhul alternatiivide väli). 6.Selgitage juhitavate tegurite muutumise iseloomu (pidev, diskreetne, kvalitatiivselt erinevad väärtused) mõju alternatiivide kogumi kujunemisele. Konkreetse alternatiivi kirjeldamine tähendab vastava punkti xij koordinaatide väljatoomist juhitavate tegurite X1 ja X2 kui koordinaattelgedega määratletud ruumis. Seejuures võib tegurite muutumine teoreetiliselt olla: · pidev teguri muutumine on täpselt mõõdetav (näiteks, alternatiivi teostamist iseloomustav ajakulu) · ligilähedaselt pidev teguri muutumine ja selle tagajärg on umbes-täpselt mõõdetav (näiteks alternatiivi teostamiseks kuluv rahasumma sendi täpsusega); · ühtlaselt diskreetne - täpse määratlusega muutumise iseloom (näiteks alternatiivi teostamiseks vajalik töötajate arv);
Selle abil saab teisendada diferentsiaalvõrrandid algebralisteks võrranditeks. See meetod toimib ainult probleemide kujul n := ||𝑠|| = (cos 𝛼1 … cos 𝛼𝑛 ) kus 𝛼𝑘 on nurgad vastavate koordinaattelgedega . Et kasutada eelnevat tulemust, 2
e 1 2 0 2 0, 859 Piirkond D võib olla ka mitme joontrapetsi summa. Siis kasutame kahekordse integraali aditiivsust. Näide 24. Arvutada kahekordne integraal e x y dxdy, D kus piirkonda piiravad kahe tsentrilise ruudu küljed, kusjuure nende ruutude keskpunktid on koordinaatide alguses, küljed on paralleelsed koordinaattelgedega ja seesmise ruudu külg on 2 ning välimise ruudu külg on 4. Jagame nüüd piirkonna D neljaks piirkonnaks D 1 , D 2 , D 3 ja D 4 . Siis e x y dxdy e x y dxdy e x y dxdy e x y dxdy D D1 D2 D3
Kuulikese keskpunkt ei liigu mitte kunagi ja ei saa ruumis mitte üheski suunas mitte natukestki liikuda. Sellise sideme näiteks on kerakujuline kand, mille abil kinnitatakse fotoaparaat statiivi külge. Sfäärilise šarniiri (liigendi) reaktsioonjõul võib olla mistahes suund. Ette pole teada ei reaktsioonjõu FA moodul, ega ka ükski nurk, mille jõud FA moodustab koordinaattelgedega (ei x- , ei y- ega z-teljega). Seetõttu on üldiselt sfäärilise liigendi reaktsioonjõul FA olemas nullist erinevad komponendid kõigi kolme koordinaattelje sihis. Arvutuste kergendamiseks lahutatakse ka siin kogureaktsioon FA koordinaattelgede suunalisteks komponentvektoriteks. Ainult siin on nullist erinevad kõik kolm komponenti, mis tuleb joonistada
väärtused) mõju alternatiivide kogumi kujunemisele. - Juhi käsutuses on üldjuhul mitu juhitavat tegurit, mille väärtustest kombineeritakse vaatlusalused alternatiivid. Juhitavad tegurid kujutavad endast sel juhul alternatiivide ruumi koordinaattelgi, alternatiive kujutavad aga ruumi punktid. Konkreetse alternatiivi kirjeldamine tähendab vastava punkti xij koordinaatide väljatoomist juhitavate tegurite X1 ja X2 kui koordinaattelgedega määratletud ruumis. Seejuures võib tegurite muutumine teoreetiliselt olla: pidev – näiteks alternatiivi teostamist iseloomustav ajakulu; ligilähedaselt pidev – alternatiivi teostamiseks kuluv rahasumma sendi täpsusega; ühtlaselt diskreetne – alternatiivi teostamiseks vajalik töötajate arv; kvalitatiivselt erinevate üksikväärtustega – alternatiivi teostamiseks vajaliku tehnoloogia
1 sh ka v¨a¨artust ID . Seega, eksisteerib punkt P (, ) D, milles f (, ) = SD 1 ID . Korrutades viimase v~orduse uuesti piirkonna D pindalaga SD , saame SD (7.6). Teoreem. Kui funktsioon f (x, y) on pidev regulaarses piirkonnas D, siis f (x, y)dxdy = ID . (7.7) D T~oestus. Kui piirkond D jagada koordinaattelgedega paralleelsete sirgetega n osapiirkonnaks D1 , D2 , . . . , Dn , siis omaduse 1 p~ohjal n ID = IDk . k=1 Omaduse 3 p~ohjal leidub igas osapiirkonnas Dk selline punkt Pk (k , k ) Dk , et n ID = f (k , k )SDk . k=1