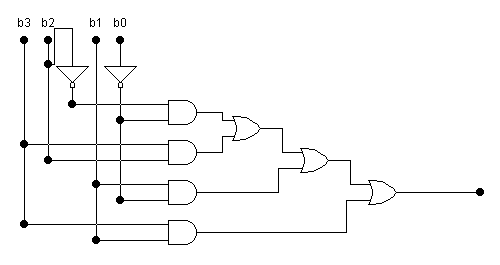
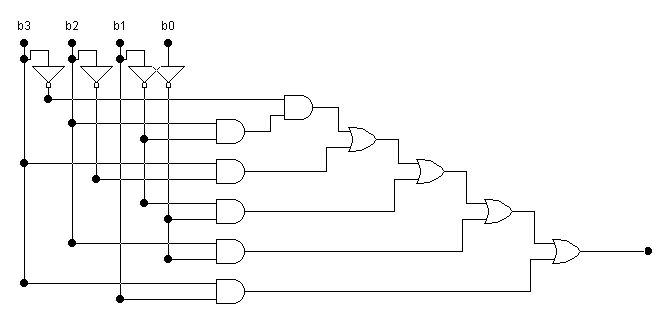
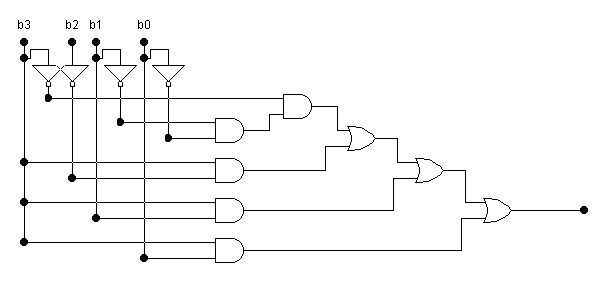
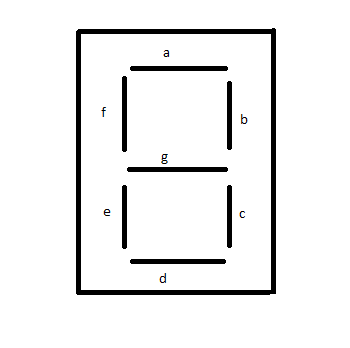
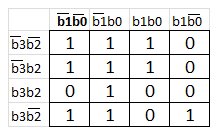
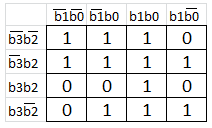
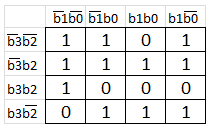
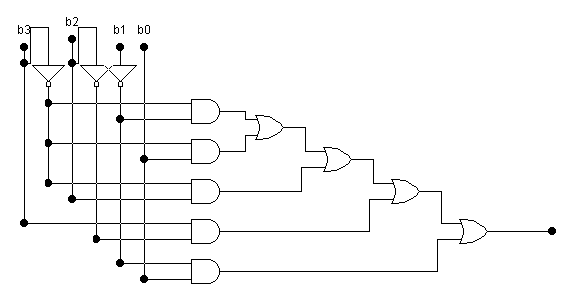
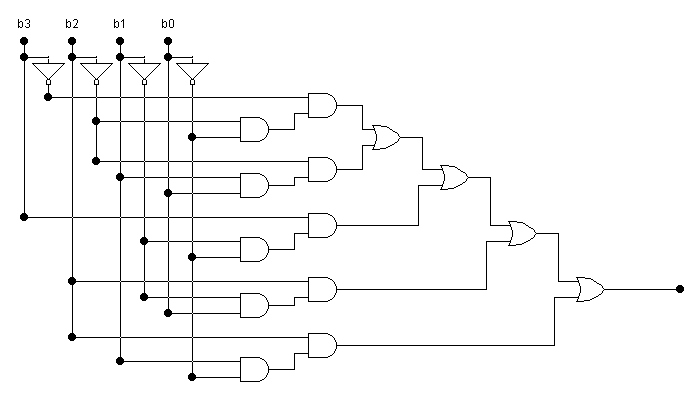
.............................. 12 Yg funktsioon..................................................................................................... 13 Kokkuvõte............................................................................................................. 14 Kasutatud materjalid............................................................................................ 15 Sissejuhatus Töö eesmärgiks on teha neljakohaline kahendarvseade ehk koodimuundur, mis muundab kahendarvu ühekohaliseks kümnendarvuks ja kuvab selle displeil. Sisendparameetriks on neljakohaline kahendkood ning displei peab kuvama kombinatsiooni. Väljundparameetriteks on vastavate kombinatsioonide väärtused. Displei ja funktsionaalplokk Ühekohaline kümnendarvdisplei, kus a-g tähistavad segmente. b b b b 3 2 1 0 a b c d e f g 0 0 0 0 0 1 1 1 1 1 1 0
Võrumaa Kutsehariduskeskus Mehhatroonika õppetool MH-10 Moore'i automaat Sihtmärgi positsioneerimise juhtseade Maris Jänes Juhendaja: Viktor Dremljuga Väimela 2012 Sissejuhatus Antud töö näeb ette tööle saada sihtmärgi positsioneerimise seade. Selleks on vaja tuletada sisend- ja väljundfunktsioonid, nende vastavad skeemid ning kõik ühendada. Et skeem töötaks peab vahele ühendama ka trigerid. Seade peab hakkama tööle etteantud parameetritega. Seadme kirjeldus Automaadil on mitu olekut (diskreetsus). Juhtseadmel peaksid olema sisendid, väljundid. Sisendite ja väljundite kombinatsioonidest hakkab olema automaadi olek. Moore'i automaadil määrab mälu elementide kombinatsioonide olekut sisendite ja mä
Mis on Diskreetne Matemaatika ? Termineid: — verbaalne esitus on mistahes info esitamine lingvistilise keele abil. " diskreetne " ≡ " mitte pidev " ehk " astmeline " — formaalne esitus on mistahes info esitamine ilma lingvistilise keele abita ehk kokkulepitud sümbolite abil. vs. " Diskreetne Matemaatika " ↔ " Pidev Matemaatika " NB! MÕTLEMINE on alati verbaalne ehk toimub mingi lingvistilise keele Diskreetne Matemaatika ei tegele reaalarvudega ega pidevate funktsioonidega. abil.
AIY3310 Diskreetne matemaatika Lühikonspekt Käesolev lühikonspekt katab suure osa aines AIY3310 (endise koodiga LIY3310) loetavast. Samal ajal ei saa seda materjali vaadelda kui antud aine täiskonspekti, mille läbitöötamine garanteeriks hea eksamiresultaadi. Loengutes ja harjutustundides käsitletakse mitmeid probleeme tunduvalt põhjalikumalt. Sellest hoolimata usun, et antud kirjutisest on paljudele tudengitest lugejatele kasu valmistumisel kontrolltööks ja eksamiks. Margus Kruus HULGATEOORIA PÕHIMÕISTEID HULK - algmõiste, intuitiivse definitsiooni järgi objektide kogum. George Cantor (1845-1918) - saksa matemaatik, hulgateooria rajaja. Hulgad jaotuvad lõpmatuteks ja lõplikeks. Meie kursuses käsitletakse lõplikke hulki, mõnikord ka lõpmatuid loenduvaid hulki. Hulgateoreetilised operatsioonid · Hulkade ühend AB={x |(xA)V (xB)} · Hulkade ühisosa (lõige) AB={x |(xA)& (xB) · Hulga täiend A = { x | ( x I ) & ( x A ) }, kus I on nn. universaalhulk. ·
Digitaaltehnika konspekt 1 Sissejuhatus......................................................................................................................... 3 2 Arvusüsteemid..................................................................................................................... 4 2.1 Kahend-, kaheksand-, kuueteistkümnendarvude teisendamine kümnendarvudeks.......4 2.2 Teiste arvsüsteemide arvude murdosa teisendamine kümnendarvu murdosaks...........5 2.3 Ülesanne 1.................................................................................................................... 5 2.4 Ülesanne 1a.................................................................................................................. 6 2.5 Ülesanne 1b.................................................................................................................. 6 Kümnendarvu teisendamine kahend-, kaheksand-, kuueteistkümnendarvudeks............6 2.6 K?
Diskreetne Matemaatika 2018 Link küsimuste juurde: Matemaatika kordamisküsimused Sisukord Sisukord 1 Soojendus 2 LAUSEARVUTUS MATEMAATILINE LOOGIKA 2 Hulgad 6 Arvusüsteemid 12 Vastavused ja relatsioonid 18 Järjestussuhted 27 LOOGIKAFUNKTSIOONID 35 KARNAUGH’ KAARDID 45 McCLUSKEY’ MINIMEERIMISMEETOD 46 JÄÄKFUNKTSIOONID 48 LOOGIKAFUNKTSIOONIDE KLASSID 50 DIGITAALSKEEMIDE ELEMENDID 52 LOOGIKAFUNKTSIOONIDE SÜSTEEMID 56 GRAAFID
Digitaaltehnika Loengukonspekt Sisukord Sisukord............................................................................................................................... 2 1. Arvusüsteemid................................................................................................................. 4 1.1. Kümnendsüsteem......................................................................................................4 1.2. Kahendsüsteem.........................................................................................................4 1.3. Kaheksandsüsteem....................................................................................................4 1.4. Kuueteistkümnend süsteem...................................................................................... 4 1.5. Kahendkodeeritud kümnendsüsteem 8421...............................................................5 1.6. Kahendkodeeritud kümnendsüsteemid 2421 ja liiaga 3......
Digitaaltehnika Loengukonspekt Sisukord Sisukord...............................................................................................................................2 1. Arvusüsteemid..................................................................................................................4 1.1. Kümnendsüsteem......................................................................................................4 1.2. Kahendsüsteem.........................................................................................................4 1.3. Kaheksandsüsteem....................................................................................................4 1.4. Kuueteistkümnend süsteem......................................................................................4 1.5. Kahendkodeeritud kümnendsüsteem 8421...............................................................5 1.6. Kahendkodeeritud kümnendsüsteemid 2421 ja liiaga 3........































Kõik kommentaarid