Inertsimoment-Steineri valem r:l=Lo+mr2, def mingi telje suhtes.Et telg kulgliikumise dünaamika kirjeldamisel. võib olla mistahes sirge ruumis, siis võib kehal olla lõpmata palju. Impulsimomendi jäävuse seadus:ainepunktide isoleeritud süsteemi Potentsiaalne e-asukoha e, valemis pole parameetrit pöörlemisest E=mg impulsimoment ajas muutumatu suurus. See on inertsimomendi ja Pascali seadus: vedelikud ja gaasid annavad rõhku edasi kõigis Tln/Ekvaator-Newt grav, joonkiirus Ek suurem-erineb tsentrifugaaljõud nurkkiiruse korrutis. L=mvr =( mr 2)(v/r) ja seega L=I. . See kehtib ka suundades ühtviisi. Kiirus max tasak, kiirendus amplituudiasendis pöörleva keha kui terviku kohta. Punktmass:keha, mille mõõtmeid antud liikumistingimustes ei pea VõnkeperioodT 2s T=1/f(sagedus) 500Hz Ine
Mehaanika. 1. Elastsusjõud. Hooke seadus Elastsusjõud esineb kehade deformeerimisel ja on vastassuunaline deformeeriva jõuga. Hooke'i seadus: Väikestel deformatsioonidel on elastsusjõud võrdeline keha deformatsiooniga. F e = -k l k-jäikus l-keha pikenemine 2. Raskuskese on punkt, mida läbib keha osakestele mõjuvate raskusjõudude resultandi mõjusirge keha igasuguse asendi korral Punktmass on keha, mille mõõtmeid antud liikumistingimustes ei tule arvestada. 3.Kulgliikumise korral liiguvad keha kõik punktid ühtemoodi (läbivad sama aja jooksul sama teepikkuse) 4. Nihe. Nihke ja lõppkiiruse võrrand. Nihe on suunatud sirglõik, mis ühendab keha algasukoha lõppasukohaga. x =Vot + at2/2; v=vo+at 5.Taustsüsteem koosneb taustkehast, koordinaatsüsteemist ja kellast. Keha kiirus on suhteline: keha kiirus sõltub selle taustsüsteemi valikust, mille suhtes kiirust mõõdetakse. Tavaliselt valitakse taustsüsteemiks maapind. 6. Hõõrdejõud- jõudu, mis tekib ühe keha liikumi
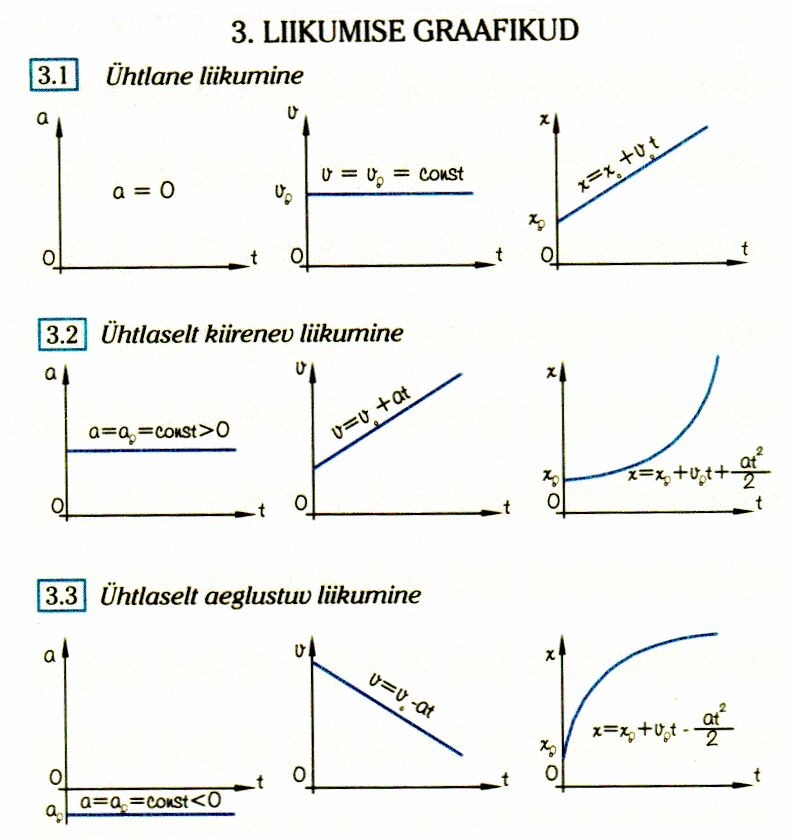
1. Kulgliikumine. Punktmass. Taustsüsteem. Nihe. Kulgliikumine keha kõik punktid liiguvad ühesuguselt, mõtteline sirge kehas jääb iseendaga paralleelseks Punktmass keha, mille mõõtmed võib antud tingimustes arvestamata jätta Taustsüsteem: taustkeha koordinaadistik kell Nihe s suunatud sirglõik, mis ühendab keha algasukohta lõppasukohaga asukoht + nihe = keha asukoht Nihe on vektoriaalne suurus. Vektoriaalne suurus määratud suuna ja arvväärtusega Mood vektori pikkus Vektori projektsioonid x-teljel on x-koordinaadi muut (s x) y-teljel on y-koordinaadi muut (sy) sx = x - x 0 sy = y - y 0 2. Ühtlane sirgjooneline liikumine. Kiirus. Liikumisvõrrand ja kiirusevõrrand. Mehaanika põhiülesanne on liikuva keha asukoha määramine suvalisel ajahetkel. x = x0 + sx y = y0 + sy Vaja nihkeprojektsioon avaldada aja kaudu. Ühtlane sirgjoonel
Seega ei ole võimalik ehitada perioodiliselt töötavat masinat (igiliikurit), mis muudaks pidevalt soojust tööks ainult ühe keha jahtumise arvel, nii et ümbritsevates kehades ei esineks mingeid muutusi (st kogu soojust ei ole võimalik täielikult konverteerida tööks). 56.Soojusenergia kvaliteet ja selle mõõt 57.Coulombi seadus. Elektrostaatiline väli. Väljatugevus Coulombi(kulooni) seadus ehk elektrostaatilise vastasmõju kvantitatiivne seadus on füüsika seadus, mis ütleb, et kaks punktlaengut q1 ja q2 mõjutavad teineteist jõuga Fe , mille moodul on võrdeline nende laengute absoluutväärtuste korrutisega ja pöördvõrdeline nendevahelise kauguse ruuduga. Coulombi seadus: Fe = k , kus k- võrdetegur = 9 * 109 Nm2/C2 Seaduse avastas Prantsuse füüsik Charles Coulomb 1785. aastal. Elektrivälja jõudude töö laengu liikumisel mõõda mis tahes suletud trajektori võrdub nulliga.
Nr 1. Kulgliikumine. Punktmass. Taustsüsteem. Nihe. Liikumise suhtelisus. Kulgliikumiseks nimetatakse liikumist, mille korral kõik keha punktid liiguvad ühesüguselt. Punktmassiks nimetatakse keha, mille mõõtmeid võib lihtsuse mõttes jätta arvestamata. Tausüsteem on kella ja kordinaatsüsteemiga varustatud keha, mille suhtes liikumist vaadeldakse. Sageli on taustkehaks Maa ja kordinaadistikuks ristkordinaadistik. Nihkeks nimetatakse keha algasukota ja lõppasukohta ühendavat vektorit. Mehaaniline liikumine on suhteline sellepärast, et keha liikumise trajektoor, läbitud tee ja nihe sõltuvad taustsüsteemi valikust. Nr 2. Ühtlane sirgjooneline liikumine. Kiirus. Liikumisvõrrand ja kiirusvõrrand. Ühtlane sirgjooneline liikumine on selline liikumine, mille puhul keha sooritab mistahes võrdsetes ajavahemikes võrdsed nihked. Kiirus näitab, millise nihke sooritab keha ajaühikus. Kiirusvõrrand: v=s/t. Liikumisvõrrand: x=x0+vt, milles nihe s=vt. Nr 3. Ühtlaselt muutuv s
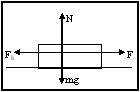
Impulsi jäävuse seadus - väliste mõjude puudumisel on süsteemi koguimpulss sinna kuuluvate kehade igasugusel vastastikmõjul jääv [m 1v1 - m2v2 = m1v1 ' + m2v2 '] Elastne põrge - kehad jäävad pärast põrget lahku Mitteelastne põrge - kehad jäävad kokku Gaasi rõhk tekib molekuli põrgetest vastu anuma seina Kontsentratsioon - osakeste arv ruumalaühikus [m -3] F = 1/3 m0 n S deltat v2 Rõhk [1/3 m0 n v-2] - molekulaarkineetilise energia põhivõrrand Reaktiivliikumine - liikumine, mille tekitab kehast eemale paiskuv kehaosa Hõõrdejõud/takistusjõud - jõud, mis takistab keha liikumist või liikuma hakkamist, hõõrdejõud on vastupidine keha liikumise suunale Seisuhõõrdejõud - suurem, kui liugehõõrdejõud [F h = -F] Liugehõõrdejõud [Fh = müü * N; N = mg] Veerehõõrdejõud - tunduvalt väiksem, kui liugehõõrdejõud. Tehnikas üritatakse minna liugehõõrdejõult veerehõõrdejõule (laagrite kasutamine) Vedelikhõõre - takistusjõud on hästi suur, aga s
Nurkkiiruse ühikuks on 1 rad/s, - nurkkiirus (1rad/s), nurga suurus( 1 rad), t- aeg(1s) Kesktõmbekiirendus- ühtlasel ringliikumisel joonkiiruse arvväärtus ei muutu, küll aga muutub pidevalt kiirusvektori suund. Kui aga kiirusvektor muutub, siis keha liigub kiirendusega. See kiirendus on suunatud pöörlemiskeskpunkti poole ja sellepärast nim. seda kesktõmbekiirenduseks. Tähis ak, ühik 1m/s2. Saab näidata ak=v2/r, kus v on joonkiirus ja r ringi raadius. Mehaanika on füüsika osa, mis käsitleb kehade liikumist ja paigalseisu ruumis ning liikumise muutust mitmesuguste mõjude tagajärjel. Mehaanika jaotatakse 3 haruks: 4) Kinemaatika- uurib kehade liikumist ruumis 5) Dünaamika- uurib liikumise tekkepõhjusi 6) Staatika- uurib, kuidas erinevad jõud üksteist tasakaalustavad Mehaanika põhiülesanne on tuntud massiga keha asukoha määramine, mis tahes ajahetkel, kui on teada algtingimused ja kehale mõjuv jõud.
Üldmõisted 1 Vektor suurus, mis omavad arvväärtust ja suunda. Mudeliks on geomeetriline vektor, mis on esitatav suunatud lõiguna. Vektoril on algus- ehk rakenduspunkt ja lõpp-punkt. Näiteks jõud, kiirus ja nihe. Skalaarid suurus, mis omab arvväärust aga mitte suunda. Mudeliks on reaalarv! Näiteks temperatuur, rõhk ja mass. 2 Tehted vektoritega vektoreid a ja b saab liita geomeetriliselt, kui esimese vektori lõpp-punkt ja teise vektori alguspunkt asuvad samas kohas. Liidetavate järjekord ei ole oluline. Kahe vektori lahutamise tehte saab asendada lahutatava vektori vastandvektori liitmisega, ehk b asemel tuleb -b. Vektori a komponendid ax ja ay same leida valemitega Vektori pikkuse ehk mooduli saab Pikkuse-nurga saab avaldada tead





















Kõik kommentaarid