Anton Adoson Roman Ibadov RADIAALVISKUMISE MÕÕTMINE LABORITÖÖ NR. 8 Õppeaines: MÕÕTMINE JA TOLEREERIMINE Transporditeaduskond Õpperühm: AT 11/21 Juhendaja: J.Tuppits Esitamise kuupäev: 21.10.2015 /Allkiri / Tallinn 2015 Töö vahendid: Nr
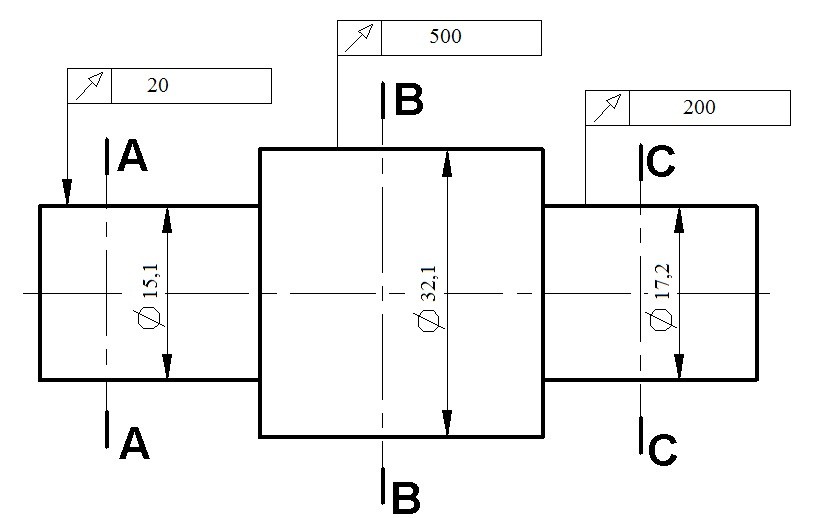
LABORATOORNE TÖÖ 5 Astmelise võlli radiaalviskumise mõõtmine 0,80 0,16 0,20 34,2 18,1 16,1 Mõõtetulemused Mõõd. Indikaatori lugem Radiaal- Läbimõõt Lubatud Täpsus- Koht Suurim Vähim viskum. nihikuga rad. visk aste
Eristatakse mehaanilist, elektrilist, hüdraulilist, pneumaatilist ajamit, vedruajamit, sisepõlemismootorit jt. Mehhanismi kinemaatikaskeem koostatakse mehhanismi liikumise uurimiseks. Skeem tehakse mõõtkavas, millest peetakse rangelt kinni. Skeemil näidatakse kinemaatilised paarid tingmärkidega. MASINA STRUKTUURIOSA TINGLIK TÄHISTUS KINEMAATIKASKEEMIS – võll, telg, varras – kinnislüli – detaili ja võlli mitteliikuv ühendus KINEMAATILISED PAARID – pöörlemispaar – translatsioonipaar – kruvipaar – silinderpaar LAAGRID – radiaalne liugelaager – kahepoolne radiaal-tugi liugelaager
MÕÕTMESTAMINE JA TOLEREERIMINE 2 ×16 tundi Teema Kestvus h 1. Sissejuhatus. Seosed teiste aladega 2 Mõisted ja terminiloogia. GPS standardite maatriksmudel 2. Geometrilised omadused. Mõõtmestamise 2 üldprintsiibid. Ümbrikunõue, maksimaalse materjali tingimus 3. ISO istude süsteem. Tolerantsiväljad 2 4. Istud. Võlli ja avasüsteem 2 5. Soovitatavad istud. Istude rahvuslikud süsteemid 2 6. Istude kujundamise põhimõtted 2 Istude analüüs ja süntees 7. Liistliidete tolerantsid. 2 Üldtolerantsid 8. Geomeetrilised hälbed. Kujuhälbed. 2 Suunahälbed 9. Viskumise hälbed. Asetsemise hälbed. Lähted 2 Nurkade ja koonuste hälbed ja tolerantsid 10. Pinnahälbed
õgvendamist. Rotatsioon-leheõgvendusmasina skeem: 1 sisendjuhtvaltsid; 2 õgvendusvaltsid; 3 väljundvaltsid. joon. 87 Lühem varbmaterjal läbimõõduga kuni 30 mm õgvendatakse plaadil lukksepavasaraga. Pikad vardad õgvendatakse spetsiaalsetel õgvendusvaltsidel. Suure ristlõikega võlle ja ümarmaterjali õgvendatakse kruvi- või hüdropressil (joon. 88). Võll asetatakse pressi töölaual prismadele. Võlli kontroll peale õgvendust toimub tsentrilel. Paindunud võllide õgvendamise skeem: a käsitsi kruvipressil (I õgvendamine pressi all; II kontrollimine tsentrite vahel); b õgvendamine 25t hüdraulilisel pressil (1 tempel; 2 võll; 3 prisma; 4 laud) joon. 88 Võlliõgvendusrakise skeem Karastamise sisepingetest tekkinud kõverused likvideeritakse samuti õgvendusega.
1. 4- ja 2-taktilise diiselmootori ringprotsessid, Kuna sisselaskeklapp (klapid) avaneb enne ÜSS-u , toimub Ülelaadimiseta (sundlaadimiseta ) mootorite täiteaste avaldub arvutuslik ja tegelik indikaatordiagramm. põlemiskambri läbipuhe ( nn. klappide ülekate ). valemiga SPM ringprotsesside arvestus. v = / ( - 1)* Pa / P0 * T0/Ta * 1/ (r+1) Erinevalt teoreetilistest ringprotsessidest saadakse tegelikus 2-TAKTILISE MOOTORI TEGELIK Kui mootor on ülelaadimisega (sundlaadimisega ),siis parameetrite sisepõlemismootoris soojust kütuse põletamisel kolvipealses INDIKAATORDIAGRAMM P0 ja T0 asemele pannakse ülelaadimise õhu pa
s. s. -- ja lähimat piirseisu liikumiskiirust kuni peatumiseni. Roolikangil paiknevad alumiseks- surnud seisuks -- lühendatult a. s. s. mitmesugused seadised mootori ja teiste mehhanismide (joon. 3,5). Teepikkust S, mida kolb läbib liikumisel silindris ühest surnud seisust teise, nimetatakse ko l v i ka i g u k s. Vänt- võlli ühe täispöörde vältel sooritatakse järelikult kaks kol- vikäiku. Protsessi või selle osa, mis toimub silindris ühe kolvikäigu vältel, nimetatakse taktiks. Kolvi liikumine silindris on seotud ka silindri ruumala muutumisega. Ruumi mahuga Vc, mis ü. s. seisus jääb kol- vipõhja ja silindrikaane vahele, nimetatakse põlemis- ehk s u r v e k a m b r i k s. Ruumi, mille. kolb vabastab lii- kumisel ü. s. seisust a. s
Jõuülekandeõli ei vahetata sageli, sest töötingimused on kerged ja õli määrimisomadused säilivad kauem. 3.3. Juhtimisseadmed Juhtimisseadmete hulka kuuluvad pidurdussüsteem ja rooliseade. Pidureid on traktoritel kaks: sõidupidur ja seisupidur. Sõidupiduriga pidurdatakse veoratta võlli ja seisupiduriga jõuülekande võlle. Klassikalisel traktoritel ei paikne vedava ratta pidurdusseadised ratta juures, vaid ratta võllil enne lõppülekannet. Traktoritel tavaliselt esisilla rattaid ei pidurdata (liigendraamiga traktoritel pidurdatakse kõiki rattaid). Osadel traktoritel on sõidupidur ja seisupidur ühendatud, juhitakse vaid eraldi hoobadega. Seisupiduri hoob on fikseeritav. Sõidupiduripedaale on traktoril kaks: üks parempoolse teine vasakpoolse veoratta pidurdamiseks


















Kõik kommentaarid