Kuressaare Ametikool Ehituse ja materjalitöötluse õppesuund Väikelavade ehitus Argo Pihtjõe ALALISVOOLU MOOTORI TÖÖPÕHIMÕTE Referaat Juhendaja: Ain Toom Kuressaare 2011 2 SISUKORD: Sissejuhatus.........................................................................................................................4 1. Ajalugu.............................................................................................................................5 2. Püsimagnetiga elektrimootori tööpõhimõtte...................................
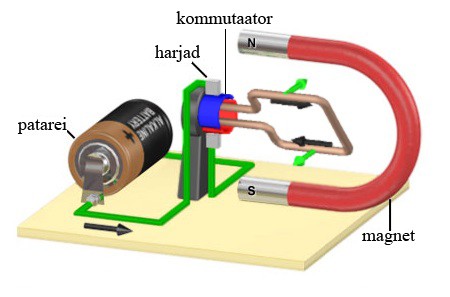
TARTU KUTSEHARIDUSKESKUS Autotehnik I PÜSIMAGNET ERGUTUSEGA. ALALISVOOLU MOOTORI TÖÖPÕHIMÕTE Iseseisev töö Juhendaja: Toomas Sommer Tartu 2009 PÜSIMAGNET ERGUTUSEGA EHK ALALISVOOLU MOOTORI TÖÖPÕHIMÕTE Püsimagnetitel on alati kindlad jõujooned, kui nende jõujoonte vahele panna juhe, mida läbib elektrivool, siis tekib jõud, mis mõjub risti juhtmes oleva voolu suuna ja magnetvälja jõujoonte suhtes, seda jõudu nimetatakse Lorentzi jõuks. Tänu taolisele elektromagnetisminähtusele on meil võimalik ehitada elektrimootor. Elektromagnetisminähtusel põhinevate mootorite tööpõhimõtteks on pöörleva
....................................................... 34 4.8. Kaitseastmed ..................................................................................................................... 35 5. Asünkroonmootor .............................................................................................................. 37 2 5.1. Asünkroonmootori tööpõhimõte ....................................................................................... 37 5.2. Asünkroonmootori sildiandmed ........................................................................................ 40 5.3. Asünkroonmootori ühendamine toiteallikaga ................................................................... 40 5.3.1. Tähtühendus ................................................................................................................... 41 5.3.2
· I on vooluahelat läbiva voolu tugevus · E on vooluahelasse ühendatud elektromotoorjõudude algebraline summa · R on vooluahelasse ühendatud takistuste summa · R0 on vooluahelasse ühendatud toiteallikate sisetakistuste summa. 18. Takistus Takistuseks ehk elektritakistuseks nimetatakse juhi omadust avaldada elektrilaengute liikumisele takistavat mõju. Elektritakistuse mõõtühik SI- süsteemis on oom. Elektritakistust mõõdetakse oommeetriga. Alalisvoolu korral nimetatakse juhi poolt põhjustatud elektritakistust täpsemalt oomiliseks takistuseks või ka aktiivtakistuseks. Vahelduvvoolu korral räägitakse näivtakistusest, mille moodustavad aktiivtakistus ja reaktiivtakistus (mahtuvustakistus ja induktiivtakistus). Takistus põhjustab pingelangu. Elektritakistuse R pöördväärtus on elektrijuhtivus G: 19. Eritakistus Eritakistus on füüsikaline suurus, mis iseloomustab elektrijuhi võimet
7.2 Generaatorimähiste ühendusviisid 101 7.3 Tarvitite tähtühendus 104 7.4 Tarvitite kolmnurkühendus 107 7.5 Kolmefaasilise voolu võimsus 109 7.6 Pöördmagnetväli 111 8 Elektrimasinad 114 8.1 Elektrimasina tööpõhimõte 114 8.2 Asünkroonmootor 115 8.3 Ühefaasiline asünkroonmootor 120 8.4 Kahefaasiline asünkroonmootor 121 8.5 Alalisvoolumootor 122 8.6 Trafo 126 9 Voolu toime inimesele 129
EO sümmeetriline optimum rpm pööret minutis ESR ekvivalentne jadatakistus s sekund F farad SCR lihttüristor FET väljatransistor SO sümmeetriline optimum FOC väljaorienteeritud juhtimine SVM vektorjuhtimine G giga = 109 (eesliide) V volt GTO suletav türistor VDC alalisvoolu volt H henri VFC pinge-sageduse juhtimine Hz herts VSI pingevaheldi IGBT isoleeritud paisuga bip. transistor W vatt JFET pn-väljatransistor ZCS nullvoolulüliti k kilo = 103 (eesliide) ZVS nullpingelüliti LPF madalpääsfilter mikro = 10-6 (eesliide) m milli = 10-3 (eesliide) oom
«Valgus» 1976 Autor ·1. MOOTORRATASTE EHITUS 9 ÜLDTEATMEID Mootorrataste liigitus. Mootorrattad on rataste ühejäljelise paigutusega mootorsõidukid. Neid käsutatakse peamiselt isikliku liiklusvahendina, kuid võimsa mootori ja vastava haagise (külg-, ees- või tagahaagis) korral ka inimeste ja kauba veoks. Sõltuvalt koaastrüktsioom iseärasustest liigitatakse moo- torrattad kolme rühma (vt. joon. 1): a) põlve- ja jäikade jalatoenditega mootorrattad, b) põlvetoenditeta, tugipõrandaga mootorrattad ehk motorollerid, c) sõtkajamiga mootorrattad ehk mopeedid. Põhitüübiks on esimese rühma mootorrattad. Kasutus- otstarbe järgi liigitatakse need tänava- ja .spordimootorra- tasteks
1. Punktmassi kinemaatika. 1.1 Kulgliikumine 1.2 Vaba langemine 1.3 Kõverjooneline liikumine 1.4a Horisontaalselt visatud keha liikumine 1.4b Kaldu horisondiga visatud keha liikumine. 2. Pöördliikumine 2.1 Ühtlase pöördliikumisega seotud mõisted 2.2 Kiirendus ühtlasel pöördliikumisel 2.3 Mitteühtlane pöördliikumine. Nurkkiirendus 2.4 Pöördenurga, nurkkiiruse ja nurkkiirenduse vektorid. 3. Punktmassi dünaamika 3.1. Inerts. Newtoni I seadus. Mass. Tihedus. 3.2 Jõu mõiste. Newtoni II ja III seadus 3.3 Inertsijõud 4. Jõudude liigid 4.1 Gravitatsioonijõud 4.1a Esimene kosmiline kiirus. 4.2 Hõõrdejõud 4.2a Keha kaldpinnal püsimise tingimus. 4.2b Liikumine kurvidel 4.3 Elastsusjõud 4.3a Keha kaal 5 JÄÄVUSSEADUSED 5.1 Impulss 5.1a Impulsi jäävuse seadus. 5.1b Masskeskme liikumise teoreem 5.1c Reaktiivliikumine (iseseisvalt) 5.2 Töö, võimsus, kasutegur 5.3 Energia, selle liigid 5.3 Energia


















Kõik kommentaarid