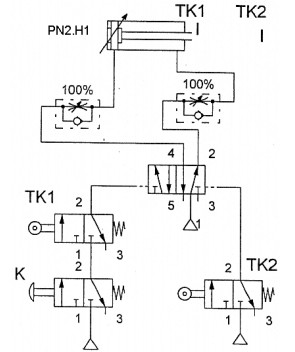
LELOL Praktiline töö PN5 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1. Tööülesanne Vastata antud küsimustele. PN5.H1 Küsimused: 1. Kui lüliti S on mõjutatud, seade ei käivitu. Miks? 2. Reguleerida aegrelee abil kolvi seisuaega plussasendis. Hinnata seisuaja reguleerimist täpsuse ja ülevaatlikkuse seisukohalt. Milline on kommentaar? 3
maht V m3 m3 vooluhulk Q m3 m3 rõhk p pascal (Pa) tehniline 1Pa=1N/m2 atmosfäär (at) bar (bar) (kp/cm2) 5 1bar=10 Pa= 0.1MPa energia, töö E dzaul, J (Nm) kilopond-meeter (kpm) Neid kahte erinevat tabelit seob omavahel Newtoni seadus F=m×a, (jõud= mass×kiirendus, kus a=g=9.81m/s2). Mõõtühikute määratlused Mass: 1 kg SI süsteemi põhiühikute hulka kuuluv massiühik, mis võrdub Pariisis rahvusvahelises Kaalude ja Mõõtude Büroos säilitatava rahvusvahelise etaloni massiga, mis on
maht V m3 m3 vooluhulk Q m3 m3 rõhk p pascal (Pa) tehniline 1Pa=1N/m2 atmosfäär (at) bar (bar) (kp/cm2) 5 1bar=10 Pa= 0.1MPa energia, töö E dzaul, J (Nm) kilopond-meeter (kpm) Neid kahte erinevat tabelit seob omavahel Newtoni seadus F=m×a, (jõud= mass×kiirendus, kus a=g=9.81m/s2). Mõõtühikute määratlused Mass: 1 kg ⇒ SI süsteemi põhiühikute hulka kuuluv massiühik, mis võrdub Pariisis rahvusvahelises Kaalude ja Mõõtude Büroos säilitatava rahvusvahelise etaloni massiga, mis on
on pika ja peenikese imitoruga.. Imipoolel pannakse õhukuppel töösilindrile võimalikult lähedale. Imipoole õhukatla puhul koosneb pumba imitoru kahekordsest torust . Lühem toru on ühendatud klapikarbis imiklapiga . Torude vahelises ruumis on vesi ja õhk. Seal oleva õhu surve arvel toimub pumba imipoolel vedeliku ebaühtlasel liikumisel imitorusse vee kiiruse ühtlustamine. Kui pump seisab , siis vedelik täidab õhukatelt keskmise tasemini. Pumba töö korral vedeliku tase kõigub maksimaalse ja minimaalse taseme vahel. Vmin - Vmax. , muutes rõhku katlas vastavalt pmax pmin. Imitakti ajal imetakse vesi imikuplist pumba töösilindrisse, mille tulemusena õhurõhk imikuplis langeb. Kuplis tekib tugev hõrendus ja atmosfäri rõhk surub vedeliku imitoru mööda kuplisse. Vedeliku liikumine kuplisse jätkub ka survetakti ajal ,mille tõttu vedeliku liikumine imitorus ühtlustub. 23
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta
käsijuhtimisaparaatide abil; automatiseeritud elektriajam inimese osavõtt juhtimises piirdub alg- juhtimiskäskluse andmisega, edaspidised juhtimistoimingud teevad mitme- sugused elektromehaanilised või muud elektriaparaadid (releed, kontaktorid, kontaktivabad loogikaelemendid, pooljuhtlülitid jne); automaatelektriajam kõik juhtimistoimingud teevad automaatjuhtimis- aparaadid, inimese osavõtt piirdub elektriajami töö jälgimisega. Elektriajami juhtimiseks kasutatavate signaalide arvu järgi liigitatakse tema juhtimissüsteemid järgnevalt: avatud juhtimissüsteemid juhtimiseks kasutatakse ainult üht juhtimissignaali, mistõttu juhtimistoime ei sõltu juhtimistulemusest puudub igasugune kontroll juhitava suuruse (kiirus, moment, võimsus vm) üle; suletud juhtimissüsteemid (joonis S1) juhtimissignaali moodustamiseks
Teedemasinate juhtimine ja hooldus Teedeehituse masinate liigitus • Teedehituse ettevalmistustööde masinad • Tsüklilise tööga pinnasekaevetehnika • Pinnaste tihendusmasinad • Autoteede katendi ehitustehnika • Teede hooldustehnika • Transpordivahendid ja eritehnika • 1.5 Bituumen-sideainete jaoturid • 1.5.1 – gudranaatorid: • a) liikuvuselt: • iseliikuvad ja auto- • poolhaagis • rippseadmena • käsi • b) tööpõhimõttelt: • - mehaanilised • - pneumaatilised Pinnaste stabiliseerimise masinad Pinnase freesid: • pinnase kobestamiseks ja peenestamiseks Pinnae frees-segurid: pinnase kobestamine, peenestamine ja segamine sideainega • pinnasefreeside ja frees-segurite tööorganid • jäigad freesid • elastsed frees-kobestid • 2 võlliga segistid • laotus-silumisseadmed Teedeehitusmasiante arengusuunad Peamised arengu tende






















Kõik kommentaarid