Tallinna Tööstushariduskeskus Voolamist reguleerivad ventiilid
9 Voolamist reguleerivad
ventiilid
9.1 Sissejuhatus
Vooluventiilidega reguleeritakse täiturite
töökiirust muutes (vähendades või
suurendades) ventiili ristlõikepindala,
reguleerimispunktis.
Vooluventiilide erandiks on vedelikku
jaotavad ventiilid, mis jaotavad
vedelikuvoolu kaheks või enamaks
haruks. Vastavalt funktsioneerimisele
jaotatakse vooluventiilid nelja rühma
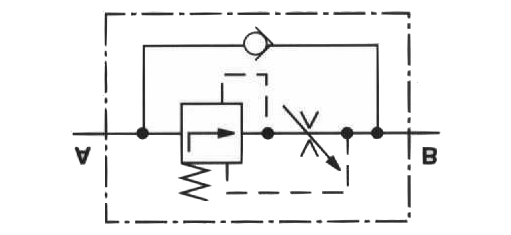
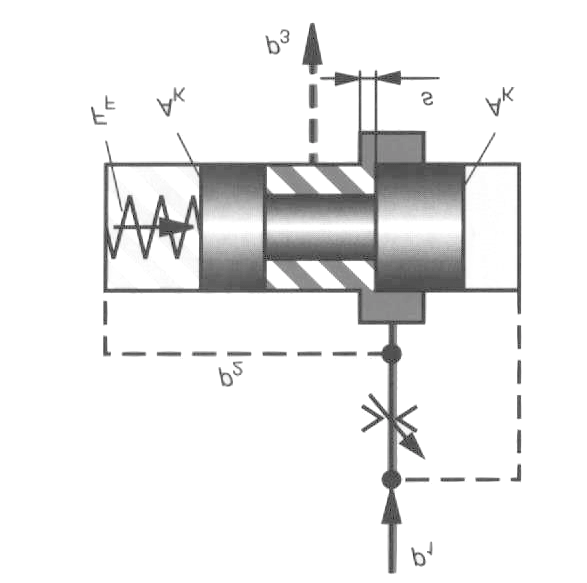
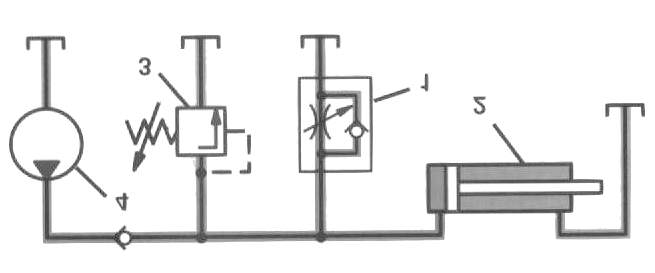
(sele 9.1, 9.2 ja 9.3). Voolamist reguleerivad ventiilid
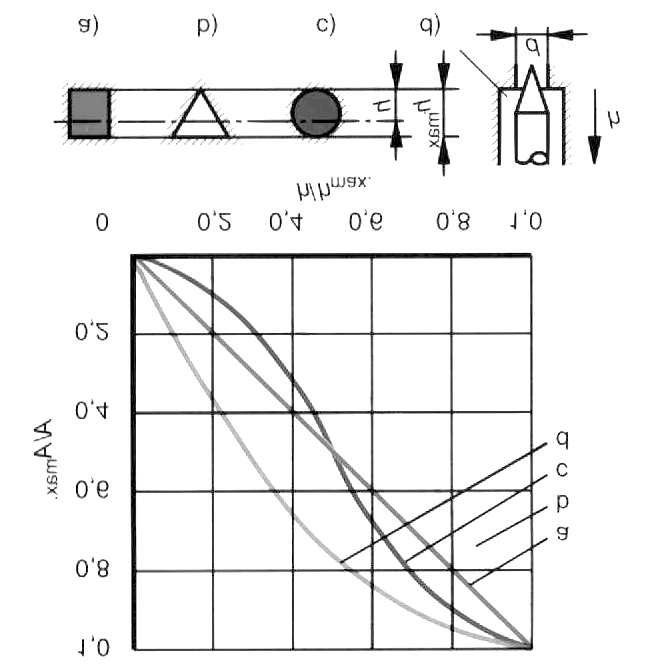
Takistid Vooluhulka reguleerivad
p sõltuv funktsioneerimine p sõltumatu reguleerimine
: sõltuvad : sõltumatud : sõltuvad : sõltumatud
Sele 9.1 Vooluventiilide tüübid
Sele 9.2 Takistid Sele 9.3 Vooluhulkareguleerivad
90 Tallinna Tööstushariduskeskus Voolamist reguleerivad ventiilid
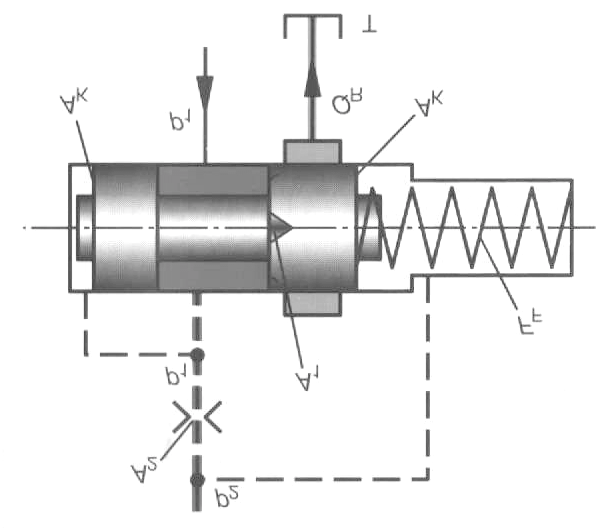
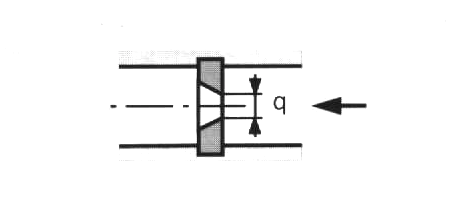
Vooluhulga muutmine vooluventiilides Takistuskoefitsient laminaarse voola -
toimub ventiili ristlõikepindala mise korral leitakse järgnevalt:
vähendamisega. Vooluhulka saab l × 64 × arvutada DIN 1952 järgi valemiga: = v × dH2 p ×2 (3)
Q=×A× (1) l = takistuse pikkus [m] = kinemaatiline viskoossus [m2/s] v = voolukiirus [m/s]
Q = vooluhulk ajaühikus [m3/s] dH = hüdrauliline läbimõõt [m]
A = ristlõikepindala [cm2] 4×A
p = rõhulangus [N/m2] dH= (4) = tihedus [Ns2/m4] U = voolamiskoefitsient, mis A = takistuse ristlõikepindala sõltub takistuse tüübist U = takistuse pikkus (0,6 0,9) Võrrandist 1 ilmneb, et konstantse
koefitsient arvestab erinevaid mõju- vooluhulga korral võime suurendada
tegureid, nagu, hõõrdumine, viskoossus , takistuse ristlõikepindala, sõltuvalt
mõjub rõhk p1 saadakse tulemusena jõud F1, mis kolvivarre kaudu mõjudes kolvile 2 pindalaga A2, tekitab silindris 2 rõhu p2. Arvestamata takistusjõude saame: F1 = F2 ja p1 × A1 = p2 × A2 siit p1 × A1 = F1 ja p2 × A2 = F2 või p1 A2 = p2 A1 Rõhumuundajas toimub rõhu suuruse muutmine pöördvõrdeliselt kolbide pindaladele. Hüdrokineetika Hüdrokineetika käsitleb vedelike voolamisseadusi ja voolamist põhjus- tavaid jõude. Hüdrokineetika abil saab 17 Tallinna Tööstushariduskeskus Hüdraulika teoreetilised alused Kui mitte arvestata vedeliku pinnal ja vedelikus endas esinevaid hõõrdejõude, võib voolamisprotsessi lugeda ideaalseks. Edasi me käsitlemegi ideaalset voolamisprotsessi, kuna seda on võimalik kirjeldada piisavalt täpselt. Voolamisseadus Torus voolava vedeliku kogus mingil
PNEUMAATIKA ALUSED Koostas: Rein Uulma Sisukord 1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2 1.1 Suruõhu kasutamise ajalugu............................................................................................. 2 1.2 Suruõhu omadused ........................................................................................................... 2 1.3 Füüsikalised alused .......................................................................................................... 3 1.4 Õhu kokkusurutavus......................................................................................................... 6 1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7 2 Suruõhu saamine ..................................................................................................................... 8 2.1 Kompressorjaam.....
PNEUMAATIKA ALUSED Koostas: Rein Uulma Sisukord 1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2 1.1 Suruõhu kasutamise ajalugu............................................................................................. 2 1.2 Suruõhu omadused ........................................................................................................... 2 1.3 Füüsikalised alused .......................................................................................................... 3 1.4 Õhu kokkusurutavus......................................................................................................... 6 1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7 2 Suruõhu saamine ..................................................................................................................... 8 2.1 Kompressorjaam.....
𝑠𝑖𝑠𝑠𝑒 𝑣ä𝑙𝑗𝑎 ∑ 𝑚̇ = ∑ 𝑚̇ 𝑠𝑖𝑠𝑠𝑒 𝑣ä𝑙𝑗𝑎 2.2. VOOLAMISE PIDEVUSE PRINTSIIP Fluidumi mehaanikas käsitletakse sageli vedeliku voolamist CV seadmes kahe ristlõikepinna vahel. Sellisel juhul on massi jäävuse seaduse erikujuks pidevuse printsiip. Vaatleme muutuva ristlõikega toru, milles voolab vedelik ja selgitame, kuidas muutub kiirus üleminekul ristlõikest 1 ristlõikesse 2 statsionaarsel voolamisel. Eeldus: vooluga risti olevas pinnas on tihedus ja kiirus konstantsed. 𝑢, 𝜌 = 𝑐𝑜𝑛𝑠𝑡 ∑ 𝑢∙𝜌∙𝐴=∑ 𝑢∙𝜌∙𝐴
Laevasüsteemides küllalt levinud pumpade jõudluse reguleerimise mooduseks on süsteemis reguleerimine ülelaske e. baipass klapiga, mis on samuti ebaõkonoomne meetod ,väheneb pumba kasutegur ja suureneb tarbitav võimsus . Ülelaskeklapiga võib süsteemi jõudlust ja survet reguleerida vähenemise suunas kuni nullini. Tsentrifugaalpumpade põhilised rikked: 1. Pump ei ime vett üles, tootlikkus on null Q= 0 - pump on veest tühi, - pump on liiga kõrgel veepinna suhtes - imitoru ventiil on kinni - pumba täitmine ei õnnestunud ( näiteks põhjaklapp laseb läbi ) - torud või imikurn on ummistunud - imitorus on suur takistus , ventiil ei ole täielikult lahti - imitorusse satub õhku ( läbi võlli või torutihendite) - vee temperatuur on liiga kõrge - pöörete arv on liiga väike. - pöörlemissuund on vale - pumbatavas vees palju sodi, võõrkehasid 2. Pump ei arenda täielikku tootlikkust Q Qnor - pumba rootor on vigastatud või nihkunud telje suunas
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Komp
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reversee
mine osa kolvi surve- ja töökäigust a. s. s. piirkonnas. Pumbakambriks on õhutihe karter, milles kolvi ülesliiku- kel, mil kolvi alumine serv avab sissevoolukanali, algab misel tekib alarõhk, allaliikumisel -- ülerõhk. küttesegu sissevool karterisse. Kui kolvipealne ruum on Kahetaktilises mootoris puuduvad gaasi sisse- ja välja eelnevalt täidetud kütteseguga, siis see surutakse sama- voolu reguleerivad klapid. Neid asendavad silindri seinas aegselt kokku. Esimene takt lõpeb segu süütamisega veidi olevad avad ehk aknad, mida suleb ja avab kolb oma edasi- enne kolvi jõudmist ü. s. seisu. tagasi-liikumisel.* >. Teise takti ajal toimub ülalpool kolbi töötakt, all- Esimesel taktil, s. o. kolvi liikumisel a. s

































Kõik kommentaarid