3-Sõiduki põikidünaamika (0)
Autofüüsika (TAT393) Sõiduki põikidünaamika 05.11.2021
Autofüüsika (TAT393)
Sõiduki põikidünaamika
05.11.2021
Margus Villau, MSc
www.tktk.ee
KLK2021/1
Ajakava
Kokku on 7 loengut (2x45 min)
• 23.09. – Loeng 1 ja 2: Sissejuhatus õppeainesse.
• 16.10. – Loeng 3 ja 4: Sõiduki pikidünaamika.
• 05.11. – Loeng 5 ja 6: Sõiduki põikidünaamika.
• 26.11. – Loeng 7: Mõõte- ja katsemetoodika ning
seadmed.
E-kursus Moodles
Autofüüsika (TAT393) KLK2021 - M. Villau
VÕTI: AUTO_2021
Mõisted ja ülevaade
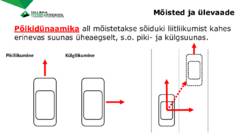
Põikidünaamika all mõistetakse sõiduki liitliikumist kahes
erinevas suunas üheaegselt, s.o. piki- ja külgsuunas.
Pikiliikumine
Külgliikumine
Mõisted ja ülevaade
Auto teelpüsivus on auto omadus liikuda ilma libisemise
ja ümberpaiskumiseta. Koos pidurdus- ja
juhitavusomadustega, kindlustab teelpüsivus ohutu liikluse.
Püsivust iseloomustatakse:
• külgpüsivusteguriga,
• auto liikumise kriitilise kiirusega.
Teelpüsivus sõltub:
• raskuskeskme asukohast,
• auto baasist ja rataste vahest,
• rehvide külgsuunalisest elastsusest.
Mõisted ja ülevaade
Juhitavus on auto omadus säilitada etteantud
liikumissuunda ja alluda rooli abil antavatele korraldustele.
Juhitavusest oleneb suurel määral liiklemise ohutus ja
turvalisus.
Auto juhitavust mõjutavad:
• rooliajami ülekandearv,
• roolitrapetsi kuju,
• rehvide külgsuunaline elastsus,
• auto raskuskeskme asukoht.
Mõisted ja ülevaade
— Auto ei tohi oma etteantud liikumissuunast kõrvale
kalduda juhuslike jõudude (külgtuul, tee-ebatasasused,
tee põikikalle) toimel.
— Auto sõidusuund peab olema juhile kergelt alluv ilma
juhti sellega väsitamata.
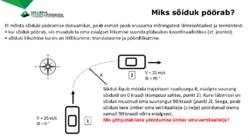
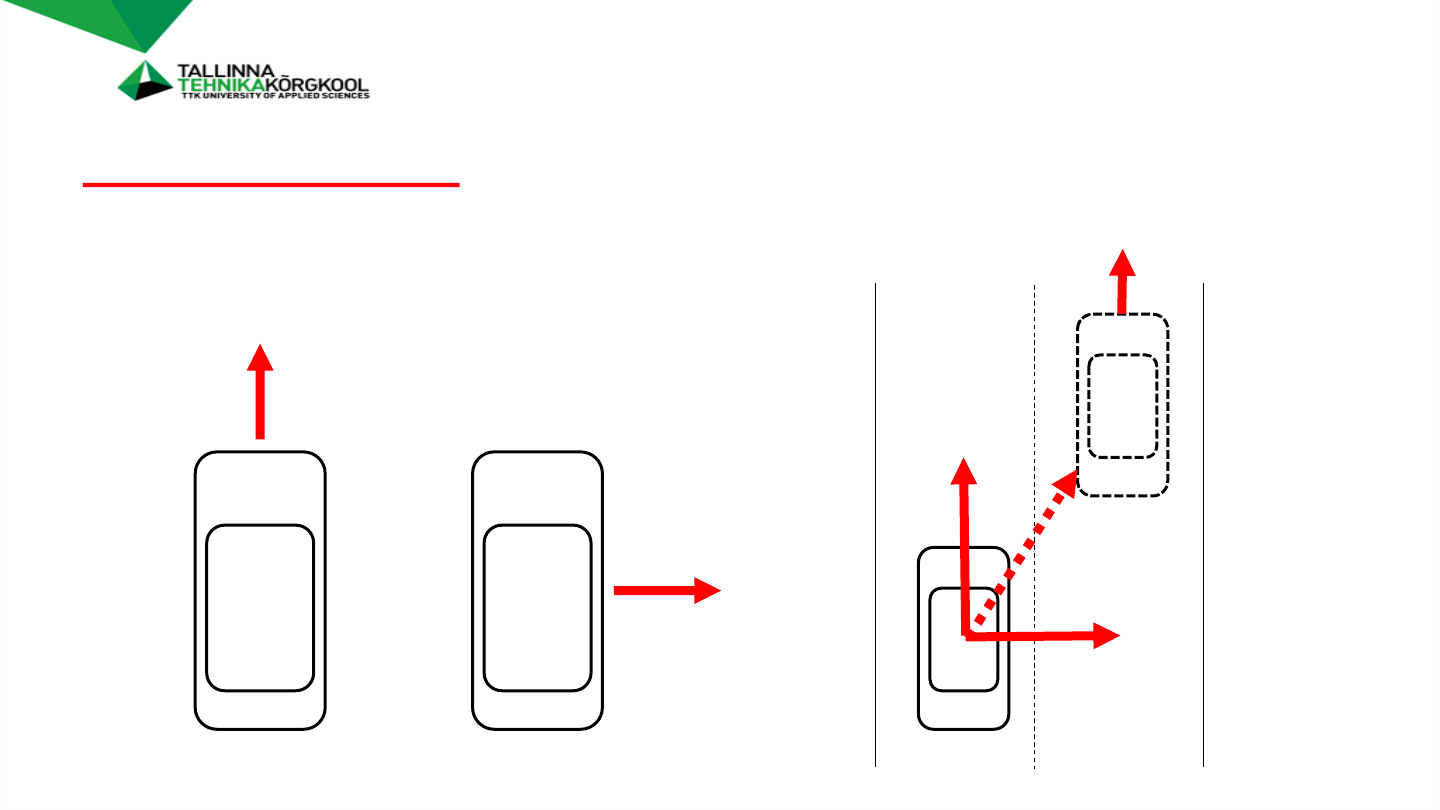
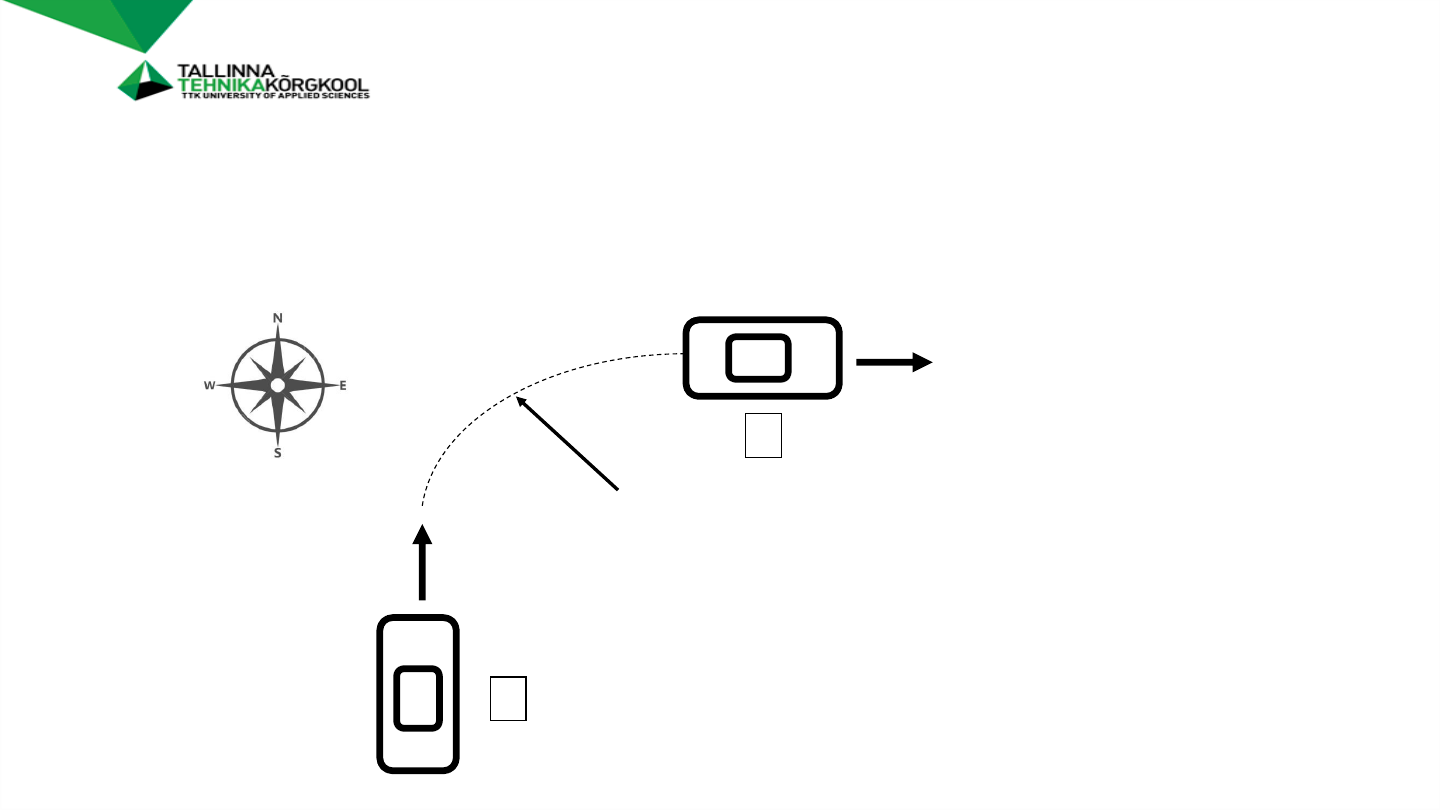
Et mõista sõiduki pööramise dünaamikat, peab esmalt peab arusaama mõningatest lähtekohtadest ja terminitest:
• kui sõiduk pöörab, siis muudab ta oma esialgset liikumise suunda globaalses koordinaadistikus (vt. joonist);
• sõiduki liikumine kurvis on liitliikumine: translatoorne ja pöördliikumine.
Sõiduk liigub mööda trajektoori raadiusega R, esialgne suunang
sõidukil on 0 kraadi (kompassi suhtes, punkt 1). Kurvi läbimisel on
sõiduk muutnud oma suunangut 90 kraadi (punkt 2). Seega, peab
sõiduki kere ümber oma vertikaaltelje (z-telje) pöördunud olema
samuti 90 kraadi võrra esialgsest.
Mis põhjustab kere pöördumise ümber oma vertikaaltelje?
1
2
V = 25 m/s
Φ = 90 °
V = 25 m/s
Φ = 0 °
R
Miks sõiduk pöörab?
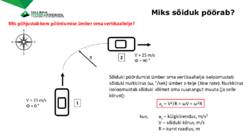
Mis põhjustab kere pöördumise ümber oma vertikaaltelje?
1
2
V = 25 m/s
Φ = 90 °
V = 25 m/s
Φ = 0 °
R
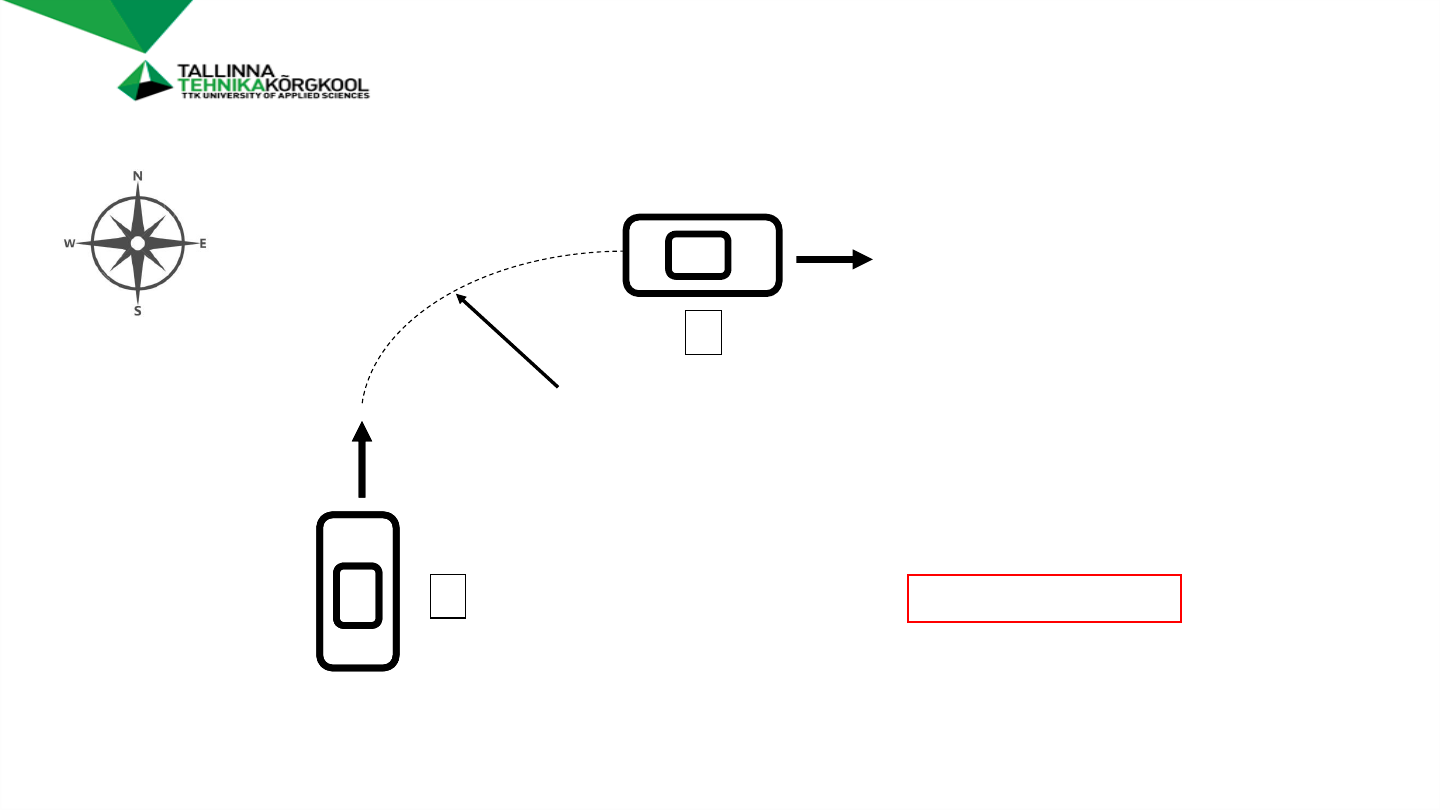
Sõiduki pöördumist ümber oma vertikaaltelje iseloomustab
sõiduki nurkkiirus (ω, °/sek) ümber z-telje (Yaw rate). Nurkkiirus
iseloomustab sõiduki võimet oma suunangut muuta (ja selle
kiirust):
ay = V2/R = ωV = ω2R
kus,
ay – külgkiirendus, m/s2
V – sõiduki kiirus, m/s
R – kurvi raadius, m
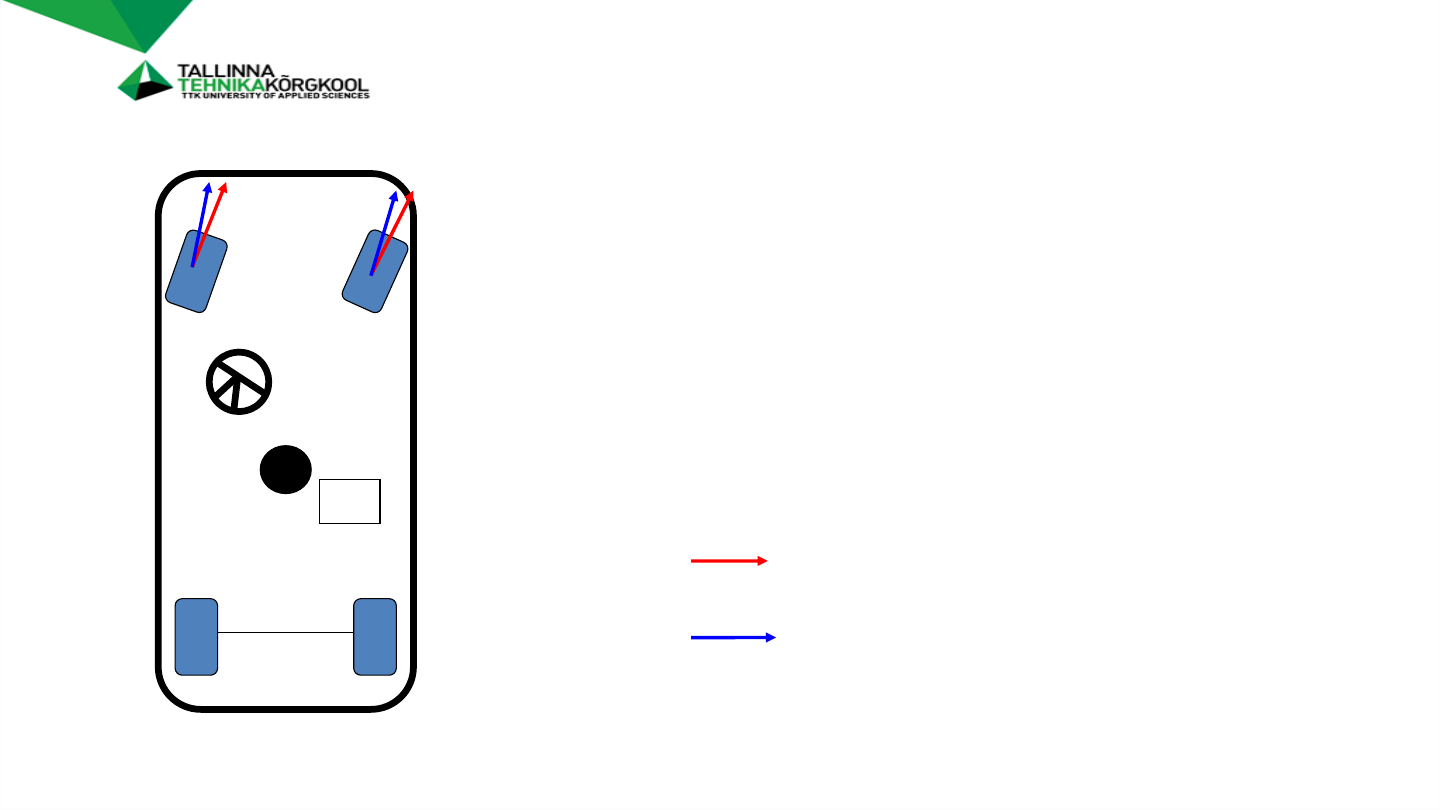
Miks sõiduk pöörab?
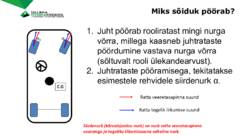
1.
Juht pöörab rooliratast mingi nurga
võrra, millega kaasneb juhtrataste
pöördumine vastava nurga võrra
(sõltuvalt rooli ülekandearvust).
2.
Juhtrataste pööramisega, tekitatakse
esimestele rehvidele siirdenurk
α.
C.G
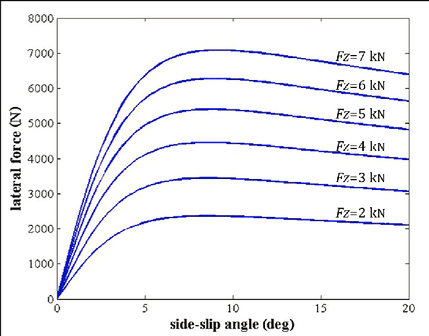
Siirdenurk (kõrvalejooksu nurk) on nurk ratta veeretasapinna
suunangu ja tegeliku liikumissuuna vaheline nurk.
Ratta veeretasapinna suund
Ratta tegelik liikumise suund
αS
αV
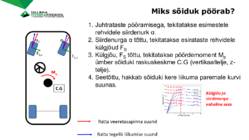
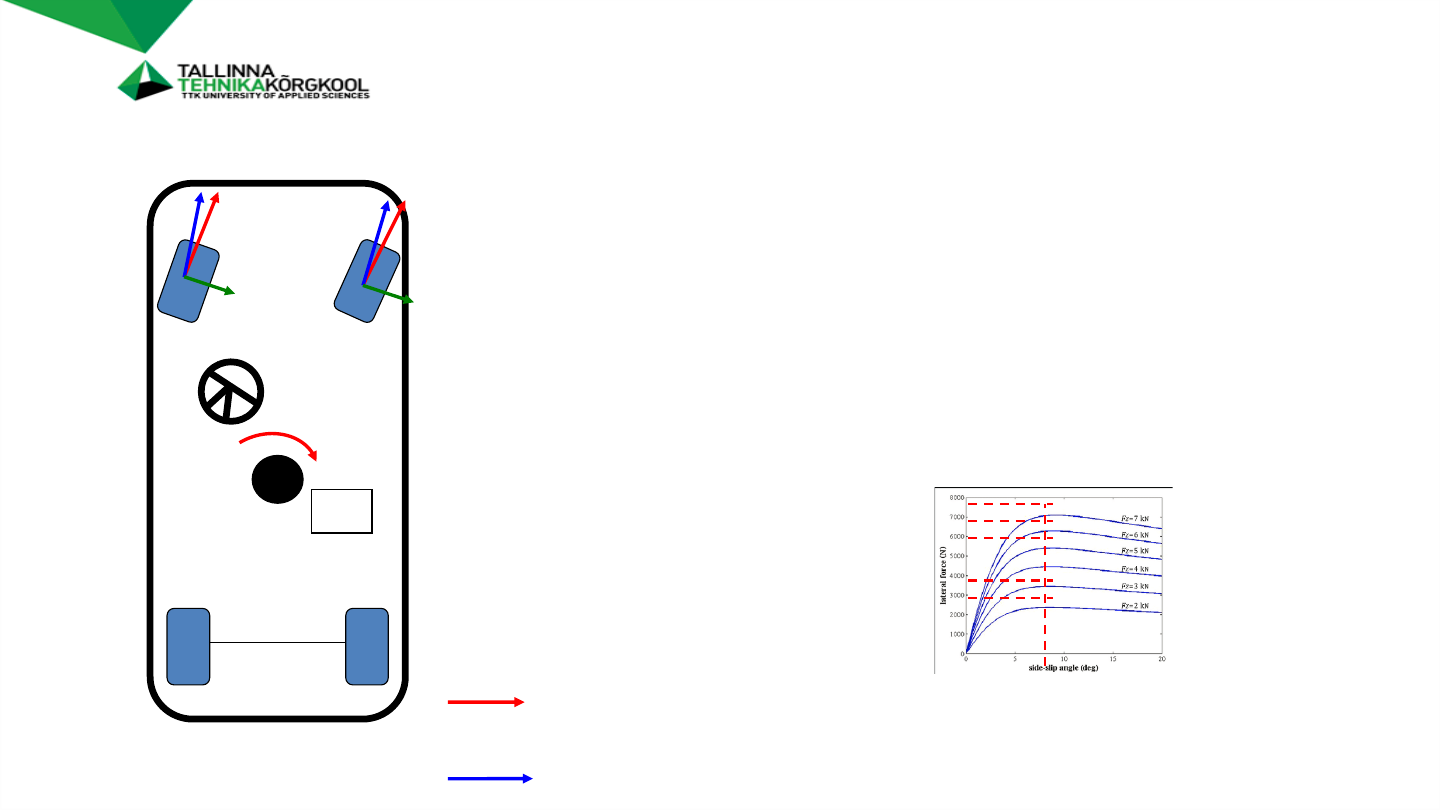
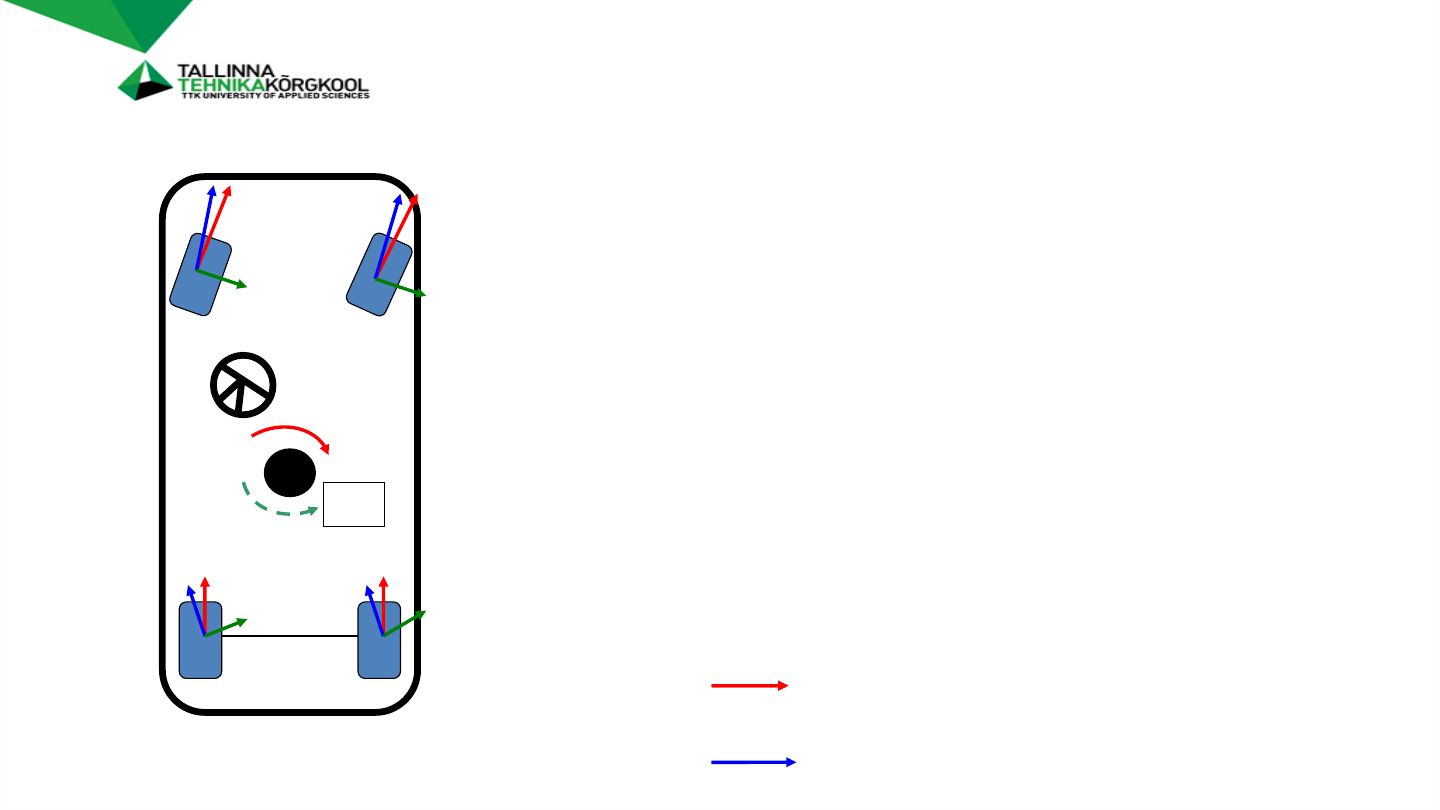
Miks sõiduk pöörab?
1.
Juhtrataste pööramisega, tekitatakse esimestele
rehvidele siirdenurk
α.
2. Siirdenurga
α tõttu, tekitatakse esirataste rehvidele
külgjõud F
S
3.
Külgjõu, F
S tõttu, tekitatakse pöördemoment Mp
ümber sõiduki raskuskeskme C.G (vertikaaltelje, z-
telje).
4.
Seetõttu, hakkab sõiduki kere liikuma paremale kurvi
suunas.
C.G
Ratta veeretasapinna suund
Ratta tegelik liikumise suund
αS
αV
FS,v
FS,s
Mp
Külgjõu ja
siirdenurga
vaheline seos
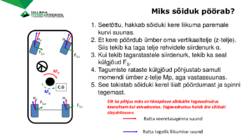
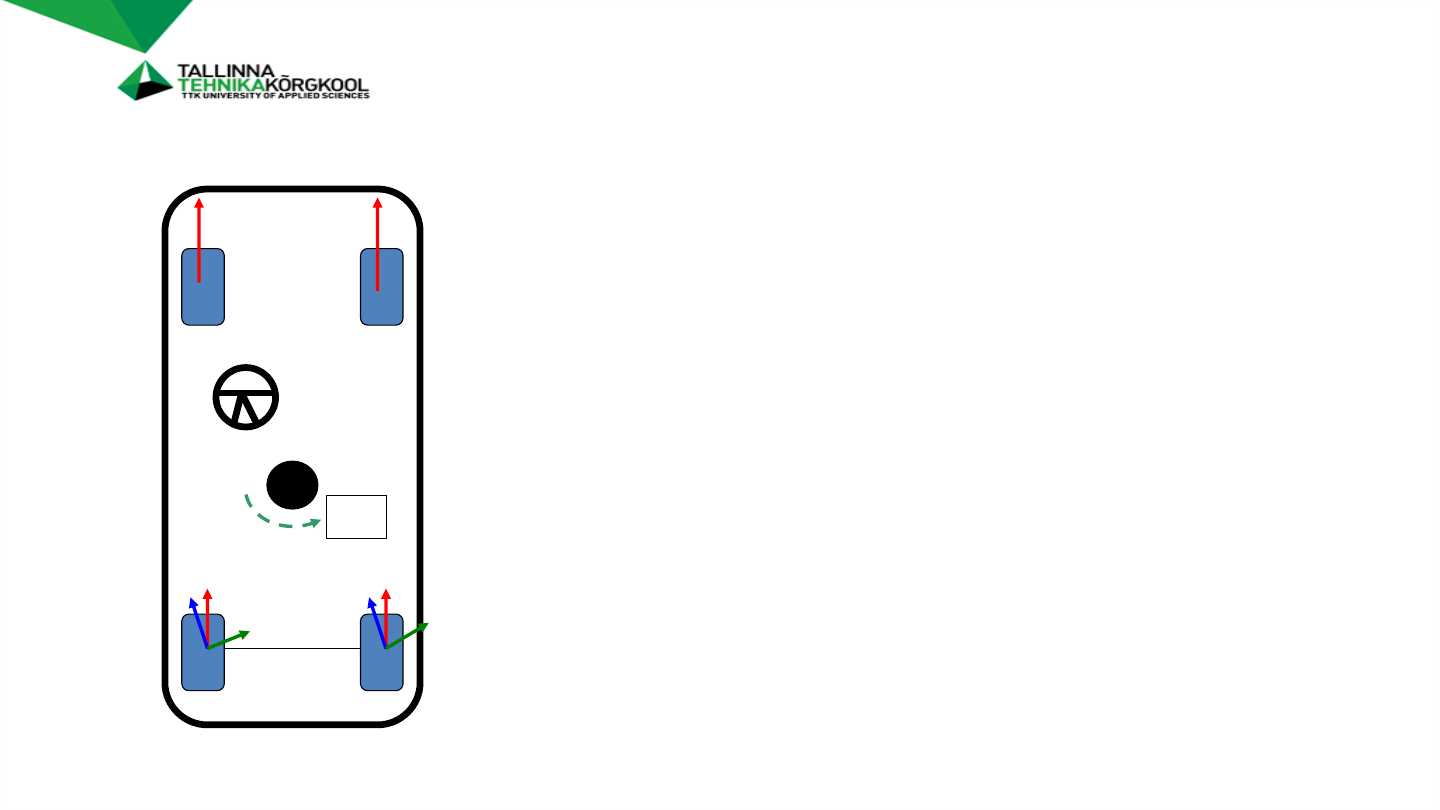
Miks sõiduk pöörab?
1.
Seetõttu, hakkab sõiduki kere liikuma paremale
kurvi suunas.
2.
Et kere pöördub ümber oma vertikaaltelje (z-telje).
Siis tekib ka taga telje rehvidele siirdenurk
α.
3. Kui tekib tagaratastele siirdenurk, tekib ka seal
külgjõud F
S.
4.
Tagumiste rataste külgjõud põhjustab samuti
momendi ümber z-telje Mp, aga vastassuunas.
5.
See takistab sõiduki kerel liialt pöördumast ja spinni
tegemast.
C.G
Ratta veeretasapinna suund
Ratta tegelik liikumise suund
αS
αV
FS,v
FS,s
Mp
FS,s
FS,v
αS
αV
Mp
Siit ka põhjus miks on tänapäeva sõidukite tagavedrustus
keerulisem kui esivedrustus. Tagavedrustus hoiab ära sõiduki
ülejuhitavuse.
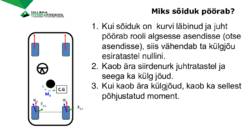
Miks sõiduk pöörab?
1.
Kui sõiduk on kurvi läbinud ja juht
pöörab rooli algsesse asendisse (otse
asendisse), siis vähendab ta külgjõu
esiratastel nullini.
2.
Kaob ära siirdenurk juhtratastel ja
seega ka külg jõud.
3.
Kui kaob ära külgjõud, kaob ka sellest
põhjustatud moment.
C.G
FS,s
FS,v
αS
αV
Mp
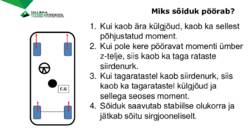
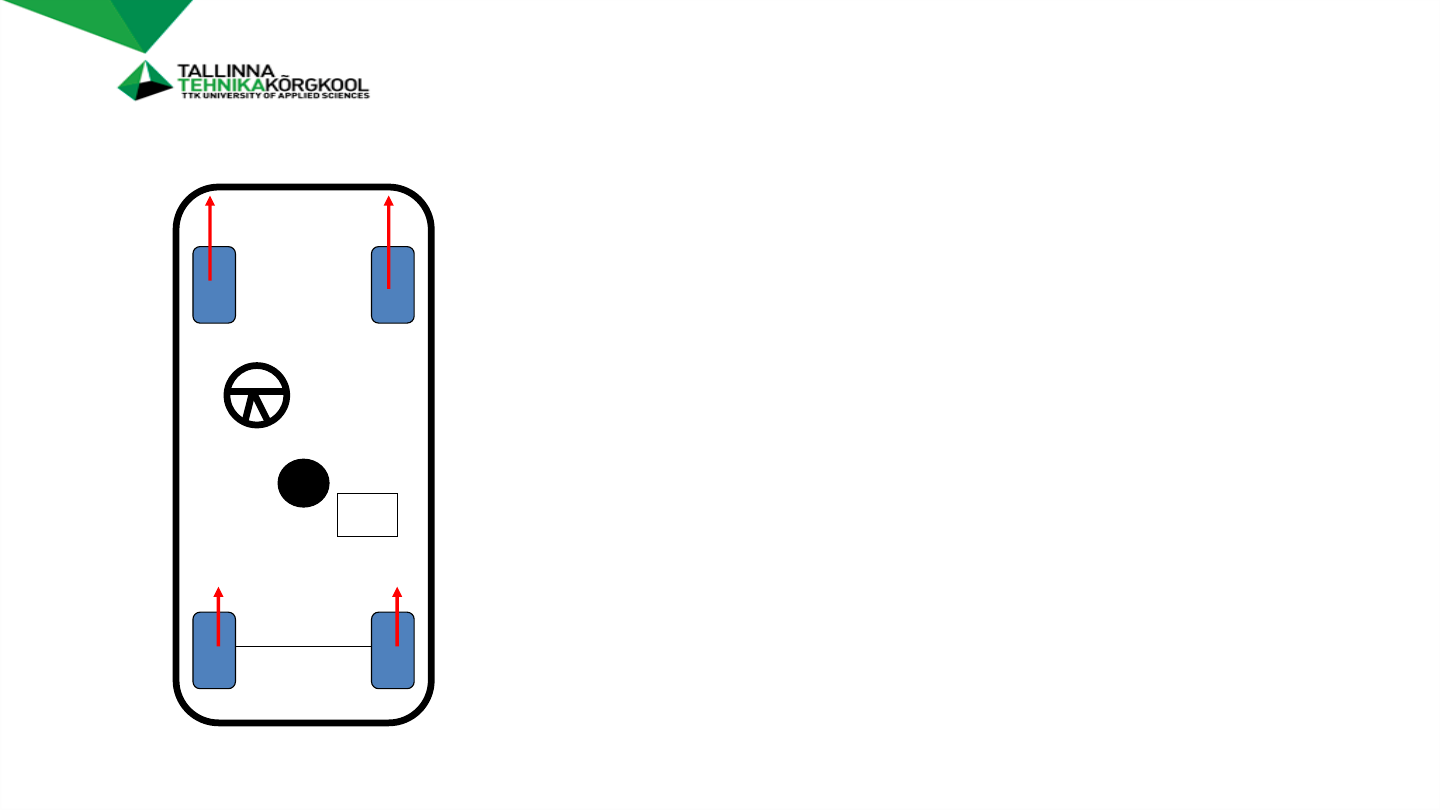
Miks sõiduk pöörab?
1.
Kui kaob ära külgjõud, kaob ka sellest
põhjustatud moment.
2.
Kui pole kere pööravat momenti ümber
z-telje, siis kaob ka taga rataste
siirdenurk.
3. Kui tagaratastel kaob siirdenurk, siis
kaob ka tagaratastel külgjõud ja
sellega seoses moment.
4.
Sõiduk saavutab stabiilse olukorra ja
jätkab sõitu sirgjooneliselt.
C.G
Miks sõiduk pöörab?
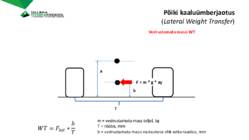
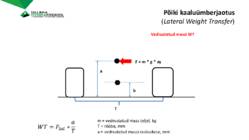
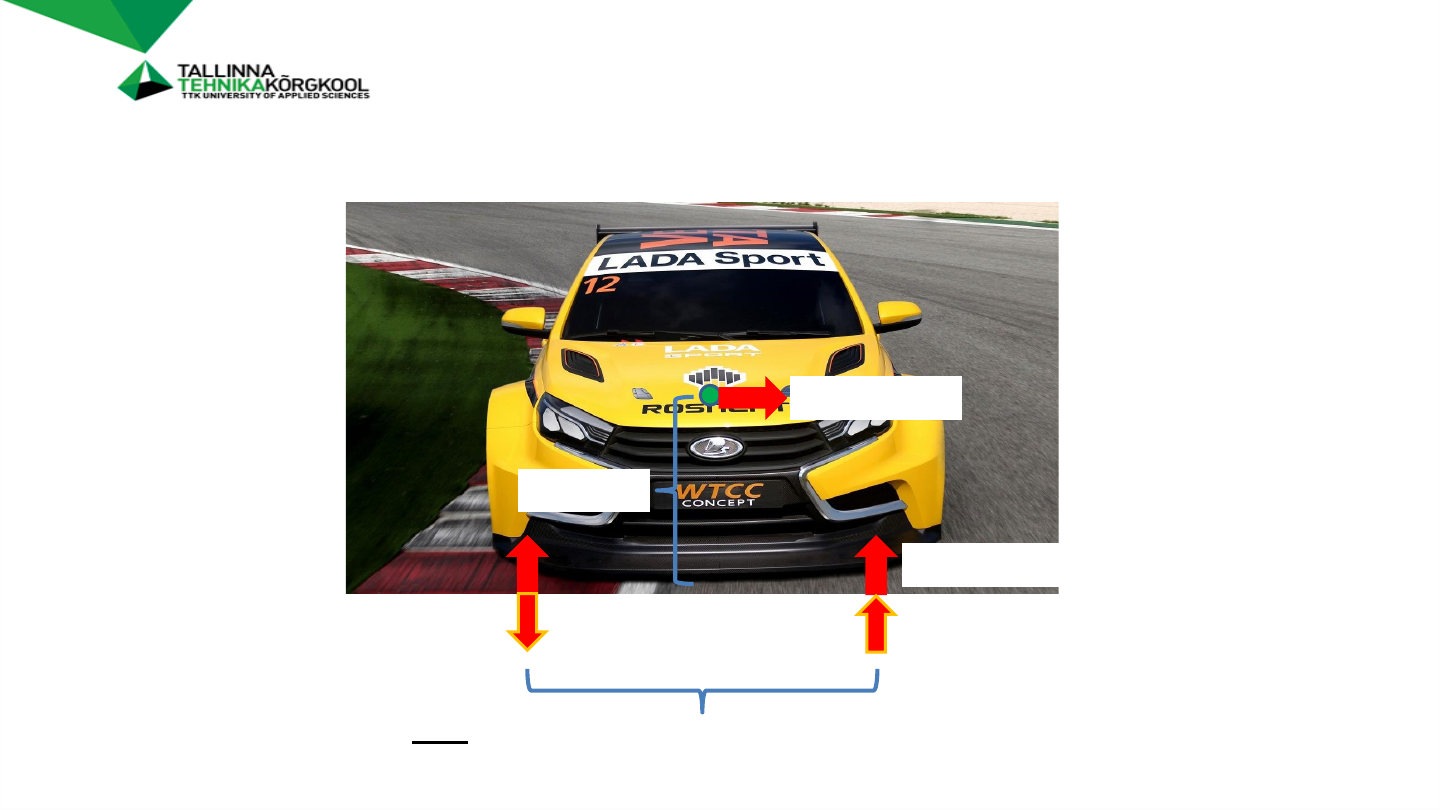
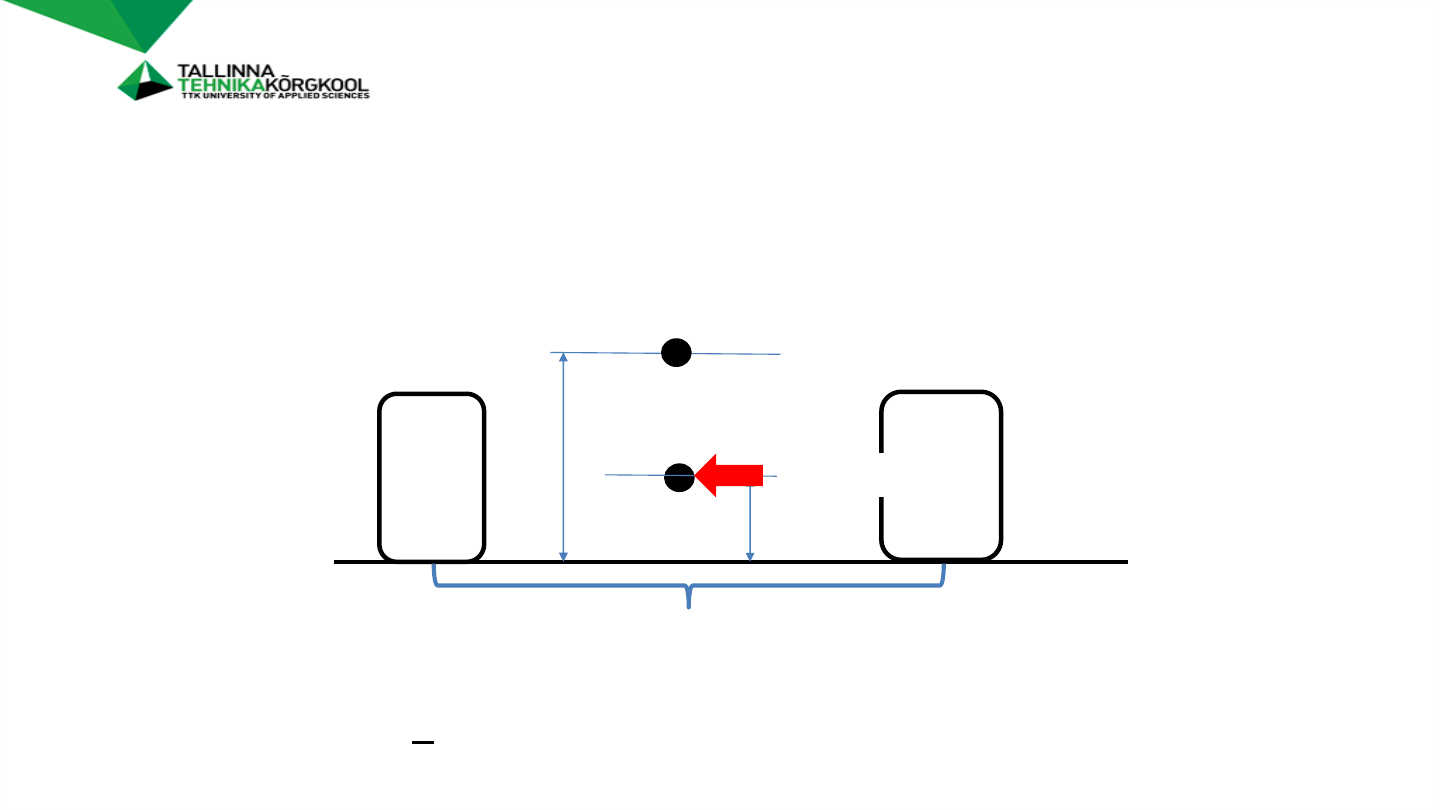
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
F = m * g * ay
Staatiline kaalujaotus
+
-
Kaalu ümberjaotus
Esimene lihtsustatud lähenemine
Rööbe
CG kõrgus
𝑊𝑇 = 𝐹𝑙𝑎𝑡 ∗
ℎ𝐶𝐺
𝑇
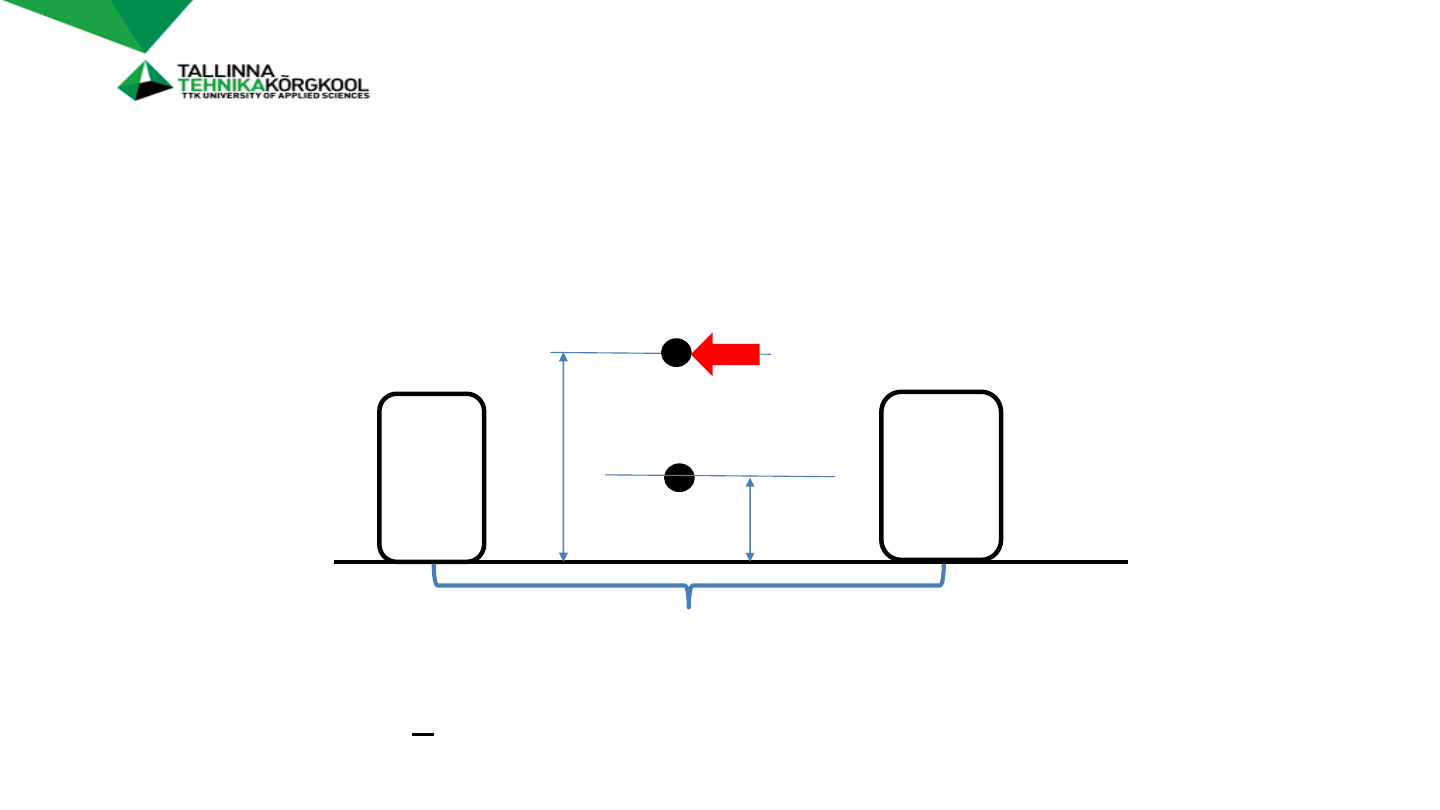
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
a
b
𝑊𝑇 = 𝐹𝑙𝑎𝑡 ∗
𝑏
𝑇
F = m * g * ay
m = vedrustamata mass teljel, kg
T = rööbe, mm
b = vedrustamata massi raskuskese ehk ratta raadius, mm
T
Vedrustamata massi WT
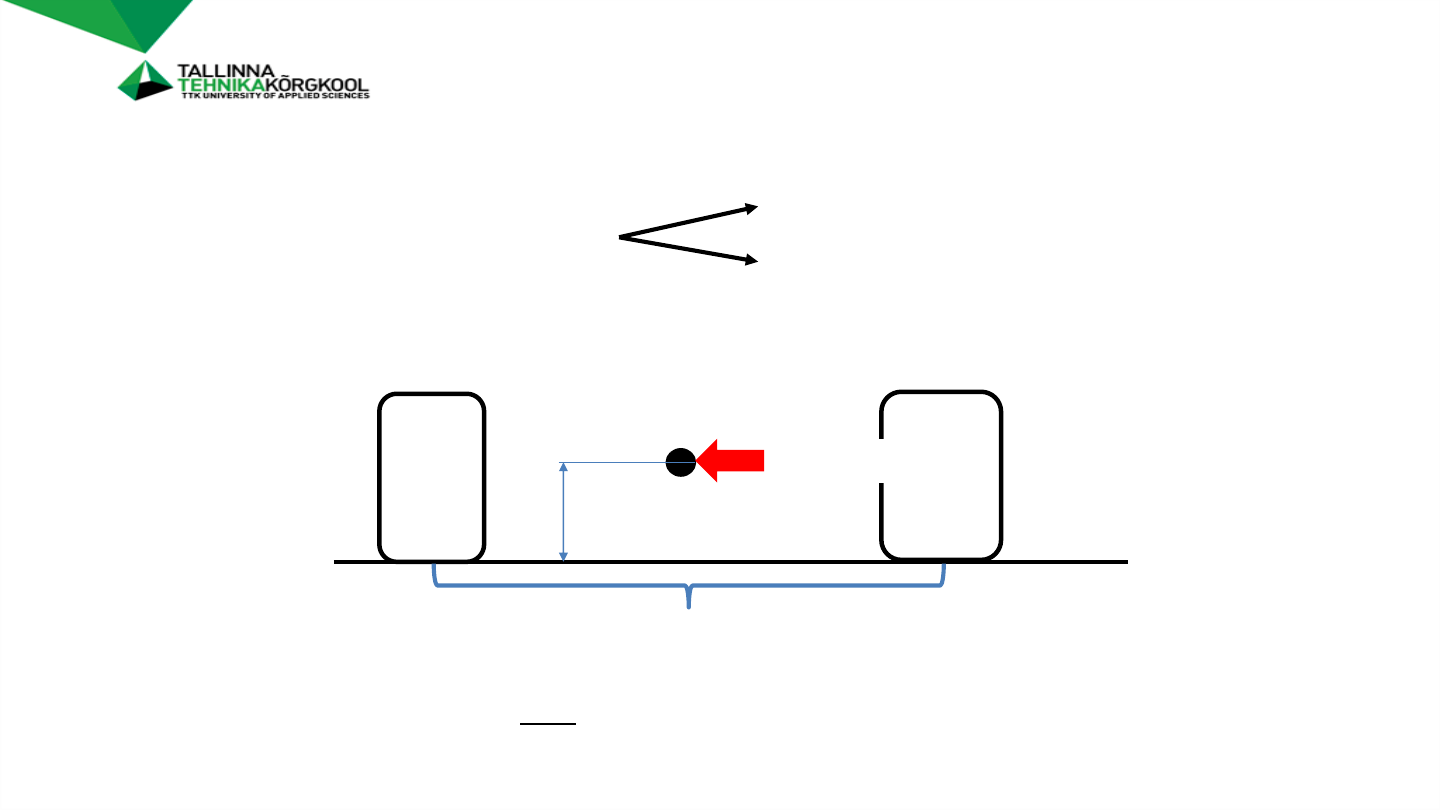
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
a
b
𝑊𝑇 = 𝐹𝑙𝑎𝑡 ∗
𝑎
𝑇
F = m * g * ay
m = vedrustatud mass teljel, kg
T = rööbe, mm
a = vedrustatud massi raskuskese, mm
T
Vedrustatud massi WT
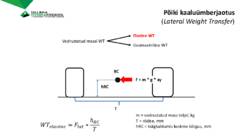
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
hRC
𝑊𝑇𝑔𝑒𝑜𝑚𝑒𝑒𝑡𝑟𝑖𝑙𝑖𝑛𝑒 = 𝐹𝑙𝑎𝑡 ∗
ℎ𝑅𝐶
𝑇
F = m * g * ay
m = vedrustatud mass teljel, kg
T = rööbe, mm
hRC = külgkaldumis keskme kõrgus, mm
T
Vedrustatud massi WT
Elastne WT
Geomeetriline WT
RC
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
hRC
𝑊𝑇𝑒𝑙𝑎𝑠𝑡𝑛𝑒 = 𝐹𝑙𝑎𝑡 ∗
ℎ𝑅𝐶
𝑇
F = m * g * ay
m = vedrustatud mass teljel, kg
T = rööbe, mm
hRC = külgkaldumis keskme kõrgus, mm
T
Vedrustatud massi WT
Elastne WT
Geomeetriline WT
RC
Põiki kaaluümberjaotus
(Lateral Weight Transfer)
Tsentrifugaaljõud
—Tsentrifugaaljõud ehk kesktõukejõud on üks
inertsijõududest, see tähendab, et tegu on vaid inertsist
tuleneva nähtusega, mitte ringliikumise põhjusega. See
tekib punktmassi või keha kõverjoonelisel liikumisel ja
mõjub liikumissuunaga (trajektoori puutujaga) risti ja
ringliikumise keskpunktist eemale.
Tsentrifugaaljõud
—Tsentrifugaaljõu moodul on määratud trajektoori
kõverusraadiusega R, keha liikumiskiirusega v ja massiga
m vastavalt valemile
𝐹 =
𝑚 ∙ 𝑣2
𝑅
Kasutatud allikad
Sarnased õppematerjalid
![LABORATÖÖRNE TÖÖ-ALUSVANKER]()
54
doc
LABORATÖÖRNE TÖÖ, ALUSVANKER
vardad ning reguleeritavad põikivardad(sele12),(sele13). Ees on põiki-reaktiivvardad.
Sele 12. Toyota Avensis tagasild
7
� Sele 13. Toyota Avensis tagasild
Vedrustuse kinemaatiline skeem:
Sele 14. sildade kinemaatiline skeem (autori joonis)
Antud sõiduk on varustatud hammaslattreduktoriga.
8
�1.3. Rataste ja käändtelje seadenurgad
Tabel 3.
Nimetus, ühikud EES TAGA
Ratta külgkalle -0º21’ -0º31’
Kokkujooks 1 mm 2 mm
![Juhtimisseadmed ja veermik]()
8
odt
Juhtimisseadmed ja veermik
vedrustus
Vedrustussüsteem on mehhanism, mis ühendab rattaid sõiduki raami või
kerega. Vedrustussüsteem kannab sõiduki koormust (massi) ühtlaselt üle maapinnale
(teele) ja leevendab teekonaruste poolt tekitatud sõidukikere kõikumisi, parandab
sõidumugavust ning tagab kontrolli sõiduki üle.
Vedrustuse põhikomponendid:
· 1) Vedru
· 2) Põikstabilisaator (valikuline)
· 3) Hoovastik
· 4) Puksid/kinnitused
· 5) Amortisaatorid
Olenemata sellest, kas tegemist on keerd-, kummi-, leht-, õhk- või
torsioonvedrudega, on just vedrud need, mis üksi kannavad sõiduki raskust ja hoiavad
õiget kõrgust sõiduki ja teepinna vahel. Vedru neelab ja hoiab sõiduki kere ja tee
vahelisest liikumisest tulenevat energiat. Pärast liikumisenergia salvestamist vedru
poolt kompressiooni teel püüab vedru pikenedes seda energiat uuesti vabastada. See
põhjustab sõiduki kere liikumise ja muudab sõiduki ebastabiilseks ning sõitmise
äärmiselt ohtlikuks
![Juhtimisseadmed ja veermik]()
14
docx
Juhtimisseadmed ja veermik
Põltsamaa Ametikool
Juhtimisseadmed ja veermik
A2
Margo Pukki
Kaarlimõisa 2009
� Sisukord
Sisukord................................................................................................................. 2
1.Vedrustus............................................................................................................ 3
1.1 Vedrustuste tüübid vastavalt vedrustuse töötamisele...................................3
1.2 Vedrustuste tüübid vastavalt vedrustussüsteemide ehitusele......................3
1.3 Vedrustuse ülesanded ja töötamine..............................................................4
2. Amotisaatorid..................................................................................................... 5
2.1 Amortisaator ja tööpõhimõte.........................................................................5
4. Rattad..................................................................
![Juhtimisseadmed ja vedrustus]()
16
docx
Juhtimisseadmed ja vedrustus
Põltsamaa Ametikool
Juhtimisseadmed &
Vedrustus
A2
Alvar Müür
Kaarlimõisa 2009
� 1.Vedrustus
1.1 Vedrustuste tüübid vastavalt vedrustuse töötamisele
Passiivne ehk tavavedrustus - Passiivseks võime nimetada kõiki tavalisi või traditsioonilisi
vedrustussüsteeme. Nende süsteemide põhiomaduseks on see, et kui nad on sõidukile
paigaldatud, ei saa nende parameetreid (jäikust, kõrgust) enam muuta. Kõiki traditsioonilisi
vedrusid ja amortisaatoreid loetakse passiivseks vedrustuseks.
Reaktiivvedrustus - Siinsesse gruppi võib paigutada ka reaktiivsed vedrustused. Kui sõiduki
rattad veerevad üle muhu või augu, põhjustab ratta asendi muutumine vedrude
kokkutõmbumise või pikenemise. Kurvi võtmine, pidurdamine ja kiirendamine põhjustavad
samuti vedrustuse liikumist, mis omakorda põhjustab kere õõtsumist, noogutust või esiosa
tõusu. Reaktiivvedrustuse gruppi kuuluvad kõik vedrustussüstee
![Autod-Traktorid I kordamisküsimused 2013-2014]()
92
docx
Autod-Traktorid I kordamisküsimused 2013-2014
AUTOD-TRAKTORID I
KORDAMIKÜSIMUSED
2013/2014.Õ.-A.
1. Sisepõlemismootorite tüübid
Sisepõlemismootorid jagunevad:
I. Kolbmootor , kogu tööprotsess toimub mootori silindris;
II. Turbiinmootor, pidevatoimeline mootor, mis muundab mehaaniliseks tööks voolava auru,
gaasi või vee kineetilist energiat (töötav aine voolab läbi düüside või juhtaparaadi tööratta
kõverpinnalistele labadele ja paneb viimase pöörlema.
2. Sisepõlemismootorite liigid
Turbiinmootorid jaotuvad:
-1
1) auruturbiinmootorid (alates mõni kW... 1200 MW ja rohkem, n = 30 000 min ):
e
aktiivturbiinid,
b) reaktiivturbiinid (töötava aine töö = voolsuuna muutumine + paisumise reaktiivjõud, mille
osatähtsus on üle 50%) ;
2) gaasiturbiinmootorid ( võivad tar
![Masina osadest ja kontroll]()
200
doc
Masina osadest ja kontroll
Mootor
Mootoriks nimetatakse masinat, milles muundatakse mingi energia mehhaaniliseks energiaks. Traktorimootorites toimub kütuse põlemisel tekkiva
soojusenergia muundamine mehhaaniliseks energiaks ja edasi generaatoris, mille käitab mootor, elektrienergiaks. Kuna kütuse põlemine toimub
mootori silindris, siis nimetatakse seda mootorit veel sisepõlemismootoriks. Sisepõlemismootoreid liigitatakse küttesegu süütamise viisi järgi:
Diiselmootor survesüüde
Ottomootor sädesüüde
Töötsükli osade arvu järgi:
![Auto remont-hooldus]()
17
docx
Auto remont, hooldus
· Rehvi rõhkude kontroll, vajadusel seadmine (kontrollitakse ka varuratast)
· Näidikute ja kontrolllampide kontroll
· Tuled, helisignaal, vajadusel lampide vahetus
· Esilaternate (valgusvihu) reguleerimine
· Klaasipuhastite ja pesurite töötamise kontroll, anumate täitmine pesuvedelikuga
· Lukupesade, lukkude, higede ja piirajate määramine
· Lõppkontroll
�Mootorsõiduk vähemalt 2-rattaline teel sõitmiseks valmistatud üle 25 km/h mootori jõul
liikuv sõiduk. Ei kuulu rööbastel ja traktorid.
Auto sõitjate või veoste veoks, vähemalt 4-rattaline mootorsõiduk (25 km/h)
Sõiduauto projekteeritud ja ehitatud kuni 9 sõitja kohaga sõitjate või nende pagasi
vedamiseks. Võib vedada haagist.
Sedaan kere kinnine, katus jäik ja paikselt kinnitatud, osa katust võib olla avatud. Salongis 4
või enam istekohta vähemalt 2 reas. 2 või 4 külgust. Võib olla luugiga pagasiruum või
tagauks. 4 või enam külgakent.
Paeton katuseta auto.
![Autode Ehitus]()
20
odt
Autode Ehitus.
Autode käigukastid.
Käigukasti vajab auto mootori omapära tõttu: aeglaselt töötaval sisepõlemismootoril pole
jõudu.
Seepärast tekib raskusi auto paigaltvõtu ja kiirendamisega. Rataste veo tugevdamiseks
suurendatakse vajadust mööda väntvõlli pöördemomenti käigkasti abil. Kui väiksem
hammasratas pöörab suuremat, siis moment suureneb kiiruse vähendamise arvel.
Käikude vahetamine toimub hammasrataste või hammasratasploki nihutamisega. Sõltuvalt
edasikäikude arvust, jagunevad köigukastid kolme-, nelja-, viiekäiguliseks. Igal käigukastil on
ka tagasikäik, mis saadakse nihutatava lisahammasrattaga.
Sünkronisaatori ehitus.
Käigukastis käikude müratuks lülitamiseks kasutatakse eriseadiseid- sünkronisatoreid.
Sünkronisaator on ehitatud nii, et liuguri küljes oleva hargiga nihutatav lülitusmuhv tõukab
esmalt blokeerrõngast, mis hakkab hammasratast kaasa vedama. Muhv läheb hambumisse
alles pärast seda, kui libisev rõngas on hõõrdejõu toimel kiirused
Traktorid ja liikurmasinad
Meedia
Kommentaarid (0)





























Kõik kommentaarid