staatilised momendid [m3]: A S z = ydA= staatiline moment z - telje suhtes A · teise astme momendid ehk I y = z 2 dA= telg - inertsimoment y - telje suhtes inertsimomendid [m4]: A I z = y dA= telg - inertsimoment z - telje suhtes 2 A I yz = yzdA= tsentrifugaal - inertsimoment yz - teljestiku suhtes A
staatilised momendid [m3]: A S z = ydA= staatiline moment z - telje suhtes A · teise astme momendid ehk I y = z 2 dA= telg - inertsimoment y - telje suhtes inertsimomendid [m4]: A I z = y dA= telg - inertsimoment z - telje suhtes 2 A I yz = yzdA= tsentrifugaal - inertsimoment yz - teljestiku suhtes A
21. Peainertsimomendid: Peainertsimomentide tähtsus seisneb selles, et nad määravad kõikide muude inertsimomentide hulgast pööratud telgede suhtes maksimaalse I1 ja minimaalse I2 inertsimomendi. Peainertsmomente arvutame valemitega, I1=I0+D0, I2=I0+D0 22. Peateljed, peatasandid: Varda pikitasandeid, mis on määratud varda telje ja ühega ristlõike peatelgedest, nimetakse peatasanditeks. Nurk 1 määrab teljepaari 1,2, mille suhtes inertsimomendid on ekstremaalsed. Need teljed on peateljed. 23. Jõuvälja intensiivsus: Ruumjõuvälja intensiivsus näitab punkti vahetus läheduses ühikmahule mõjuvat jõudu, mõõtühikuga N/m3. 24. Jõuvälja resultant: Seega joonjõuvälja resultant võrdub koormusepüüri pindalaga, resultandi mõjusirge aga läbib koormusepüüri raskuskeset.
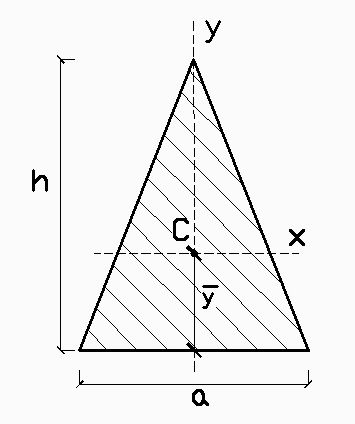
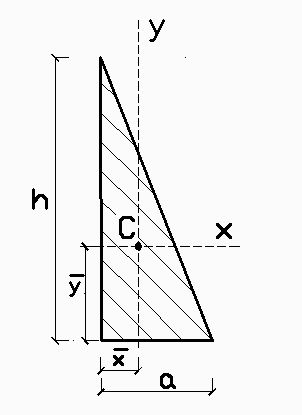
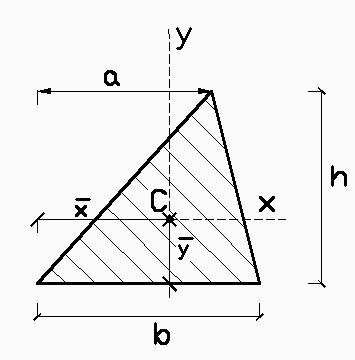
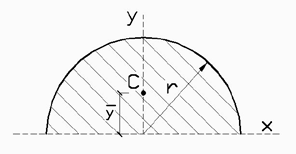
Lihtkujundite inertsimomendid-1) ristkülik Ix=bh3/12, Iy=bh3/3, kus b on laius ja h kõrgus; 2)kolmnurk Ix=bh3/36 , Iy=(h(b/2)3)/6 , Ixy=±(b2h2)/72 ; 3)ring Ip=d4/32, ringil Ix=Iy ning kuna Ip=Ix+Iy=2Ix=2Iy, siis Ix=Iy=Ip/2= d4/64. Liitkujundi inertsimoment mingi telje suhtes- võrdub osakujundite inertsimomentide summaga sama telje suhtes. Pöördenurk- nurk lähtetelje positiivsest suunast vastava pööratud telje positiivse suunani. Tan = -(D0- I*)/Ixy Peateljed- teljepaari , mille suhtes inertsimomendid on ekstremaalsed. Tunnuseks on tsentrifugaalmomendi võrdumine nulliga. Sümmeetrilise kujundi peateljeks on alati sümmeetriatelg ja selle risttelg. Mittesümmeetrilise kujundi korral kasutan nurga leidmiseks tan valemit. Peainertsmomendid- ekstremaalsed inertsmomendid. Peatasand-varda pikitasand, mis on määratud varda telja ja ühega ristlõike peatelgedest. Jõusüsteemi tasakaal- tarvilik ja piisav on tingimus, et nulliga võrdukisd jõudude projektsioonide summad
Hulkliikmete korrutamine Tehted Arvu ruutjuur Funktsioonide graafikud Ring (a+b)2 =a2+2ab+b2 astmetega ⎧a, kui a > 0 Võrdeline seos : y=ax d (a-b)2=a2-2ab+b2 (a : b)n=an : bn ⎪ a>0 d = 2r r= a = a = ⎨ - a, kui a p 0 2 2 (a-b)(a+b)=a2-b2 (ab)n=an bn ⎪0, kui a = 0 (a+b)(c+d)=ac+ad
PUITKONSTRUKTSIOONIDE ABIMATERJAL EVS-EN 1995-1-1:2005 EUROKOODEKS 5 Puitkonstruktsioonide projekteerimine Osa 1-1: Üldreeglid ja reeglid hoonete projekteerimiseks Koostas: Georg Kodi PUITKONSTRUKTSIOONID –ABIMATERJAL 1/106 Georg Kodi TALLINNA TEHNIKAÜLIKOOL ehitiste projekteerimise instituut SISUKORD 1. PUIDU TUGEVUSKLASSID..................................................................................................................... 4 2. MATERJALI VARUTEGURID ................................................................................................................ 10 2.1 Kandepiirseisund ............................................................................................................................. 10 2.2 Kasutuspiirseisund........................................................................................................................... 14 2.3 Elam
KOONDUVA JÕUSÜSTEEMI RESULTANT Kodutöö 14 Created by free version of DocuFreezer ―→ F1 = 10 N ―→ F2 = 15 N ―→ F3 = 40 N F2x = F2 ⋅ cos30 = 13 N F2y = F2 ⋅ sin30 = 7.5 N F3x = F3 ⋅ sin30 = 20 N F3y = F3 ⋅ cos30 = 34.6 N Fx = ∑ Fix = F2x −
1. Kahe muutuja funktsioon ja selle osatuletise rakendused: ekstreemumi leidmine, pinna puutuvtasapind ja normaal, näiteid Kahe muutuja funktsioon esitab pinda xyz-ruumis R3. Piirkonna D (x,y)ЄD igale punktile vastab z=f(x,y). Piirkond D on funktsiooni f määramispiirkond. Osatuletiste rakendused: Ekstreemumi (min, max) leidmine. Punkt, kus osatuletis on 0, nim. kriitiliseks punktiks. P(xo,yo). Puutujatasandi võrrand: fx(x0,y0)x+fy(x0,y0)y-z+d=0. Punkt Q0(x0,y0,z0) kuulub puutujatasandile.Seal pt.s puutujatasandiga risti olev vektor n on pinna normaal pt.s Q0. 2. Määratud integraal ja selle geomeetrilised rakendused: tasapinnalise kujundi pindala, joone kaare pikkus, pöördpinna ruumala ja pindala, näiteid Nimetatakse integraalsummade piirväärtuseks. Newton-Leibinzi valem lubab määratud integraale arvutada määramata integraalide abil. Integreerimise omadusi: 3+2 valemit Rakendused: 1) Tasap. kujundi S=int(ülem-alum) 2) Joone kaare pikkus VALEM 3)Pö?



















Kõik kommentaarid