Puurpingid Puurpink on metallitöötluspink
avade puurimise, nende avardamiseks, hõõritsemiseks, keermepuuriga keermestamiseks ja süvistamiseks. Nad võimaldavad puurida avasid läbimõõduga kuni 100mm, rõngaspuuridega isegi
suuremaid .
Puurpingid liigitatakse:
universaalpingid;
püstpingid;
radiaalpingid;
eripingid.
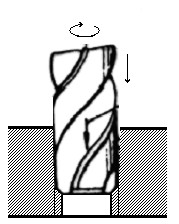
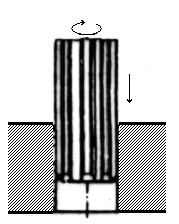
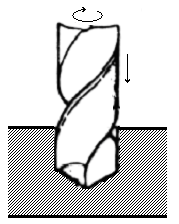
Puurimine
Ülepuurimine
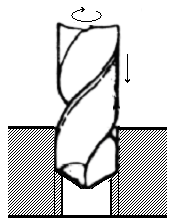
Avardamine
Hõõritsemine
Puurpingid võib jagada kahte rühma:
püstpuurpingid – ettenähtud avade puurimiseks ja keermestamiseks kergetesse detailidesse, mida on kerge töölaual liigutada. See koosneb rõhtsast töölauast ja spindlist, millesse kinnitatakse lõikeriist. Spindlile antakse püstsihiline
ettenihe .
radiaalpuurpingid – kasutatakse keskmiste ja suurte detailide töötlemiseks. Nendel on võimalik silinderhülssi pöörata ja nikutada spindlikasti radiaalselt mööda konsooli.
Avasid läbimõõduga kuni 12mm puuritakse lauapuurpinkidel.
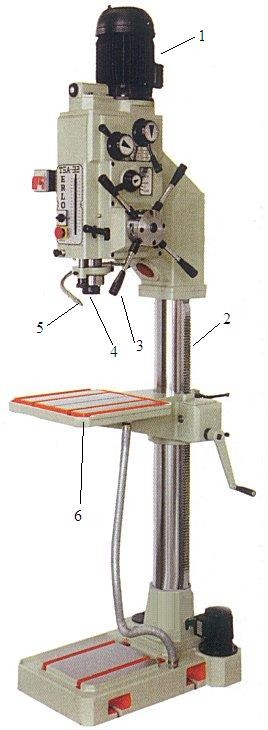
Püstpuurpink1.Mootor
2.Hammaslatt
3.Ettenihkekang
4.Spindel
5.Õlidüüs
6.Töölaud
Allikas:
radialdrillingmachine.net/Allikas:
german -traders.comRadiaalpuurpink1. Mootor
2.Spindlikast
3.Konsool
4.Tõstekruvi
5.Spindel
6.Juhtnupud
7.Silinderhülss
Suurte täpsuste saamiseks kasutatakse
koordinaatsisetreipinke.
Koorrdinaatsisetreipinki kasutatakse väikeste ja keskmiste baasdetailide ja
kere avade töötlemiseks. Töölaud ja spindelkast, mis on ühtlasi pingi põhisõlmedeks, positsioneeritakse ristkoordinaatides, töörikut positsioneeritakse polaarkoordinaatides pöördlaud. Pöördlaud võimaldab toorikut pöörata rõhtasendis 0-360°. Universaalse pöördlaua kasutamine võimaldab toorikut pöörata ka 0-90° püstasendis. Koorrdinaatsisetreipingid paigutatakse püsiva temperatuuriga ruumidesse eraldi vundamendile.
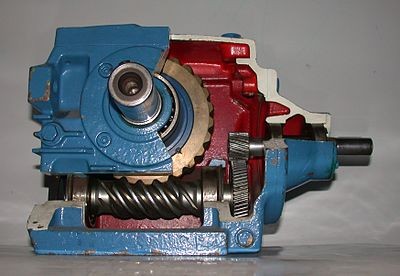
Tigureduktor.
Reduktoriks
nimetatakse tavaliselt kinnist
hammas-
või
tiguülekannet,
mis on projekteeritud kas iseseisva agregaadina või siis ehitatud
masinasse
sisse.
SisukordReduktori
ülesanneReduktori
ülesandeks on vähendada veetava
võlli
nurkkiirust
võrreldes vedava võlliga; nurkiiruse vähendamisega kaasneb
pöördemomendi
suurenemine veetaval võllil. Seadmeid, mis suurendavad nurkkiirust,
nimetatakse kiirenditeks ehk
multiplikaatoriteks.
Reduktorite klassifikatsioon - Üheastmelised reduktorid ,
- Mitmeastmelised reduktorid.
Üheastmelistel
silinderratastega reduktoritel on maksimaalne ülekandearv
imax =8,
kaldhammastega koonusratastega reduktoritel aga imax=5...6.
Kaheastmelistel reduktoritel on õlekandearv suurem, kuid ka neil ei
ületa imax=63.
Kui i=31,5...400 tehakse reduktor kolmeastmelisena. Veel suurema
astmete arvuga reduktoreid kohtab väga harva. Suurte ülekandearvude
korral projekteeritakse üks aste
tigu - või planetaarülekandena.
Reduktorite
projekteerimineÜldistReduktorid
võib projekteerida kas spetsiaalselt mingi
masina
jaoks või siis universaalsetena, kasutamiseks väga mitmesugustes
masinates. Sel juhul valitakse need valmistajatehase kataloogidest
ülekantava
võimsuse
ja soovitud
ülekandearvu
järgi.
Eelistada
tuleb väiksema astmete arvuga reduktoreid, kuid üheastmelised
reduktorid on mitmeastmelistest palju kogukamad.
Üheastmelised
silinderratastega reduktorid on tavaliselt horisontaalsete
võllidega.
Hammasrattad
võivad olla sirg-, kald- ja noolhammastega. Reduktorite kered on
kõige sagedamini valatud
malmist,
harvemini keevitatud
terasest .
Võllid toetuvad kas
veere -
või
liugelaagritele.
Viimaseid kasutatakse peamiselt raskemasinaehituse reduktorites.
Kaheastmelisi
reduktoreid ehitatakse põhiliselt kahe skeemi kohaselt. Esimesel
juhul
sisend - ja väljundvõlli teljed ei ühti ning võllide otsad
võib välja tuua reduktori kere ükskõik kummast küljest. Teisel
juhul sisend- ja väljundvõlli teljed ühtivad ning moodustavad ühe
sirge. Selliseid reduktoreid nimetatakse samatelgseteks. Nende
paremuseks on väiksem pikkus võõreldes esimese skeemi järgi
ehitatutega.
Hammasrataste
ebasümmetriline
paigutus tugede suhtes põhjustab suurtel koormustel
(võllide
deformeerumise
tõttu) ülekantava jõu ebaühtlast jagunemist hamba pikkusele. See
puudus on kõrvaldatav reduktori teise astme poolitamisega. Koormuse
ühtlasemaks jaotamiseks paralleelselt töötavate rataste vahel ning
laagrite
telgkoormamise vältimiseks projekteeritakse ühele võllile
asetatavate rataste kruvijoonelised hambad erisuunalistena. Tugede
konstruktsioon peab sel juhul aga
võimaldama ükskõik kumma võlli
mõningast telgnihkumist.
Võllide
telgtasapinna asendi järgi võivad reduktorid olla horisontaalsed,
vertikaalsed või kaldsed.
Neil
juhtudel kui
pöördemoment tuleb üle kanda ristuvate võllide
vahel, kasutatakse ühe- või kaheastmelisi koonusreduktoreid.
Sirghammastega
koonusreduktoritel on maksimaalne ülekandearv imax=
4, kald- või kõverjooneliste hammastega koonusreduktoritel aga
imax=5
ning üksikutel harvadel juhtudel imax=6.
Suuremate ülekandearvude korral kasutatakse
koonussilinderreduktoreid.
Tigureduktoritel
võib tigu paikneda
üleval , külgedel või vertikaalselt. All
paiknevat tigu kasutatakse ainult teo ringkiirustel kuni 5 m/s.
Reduktorite
konstruktsioonÜkskõik
millise
eespool toodud skeemi kohaselt ehitatava reduktori
konstruktsiooni määrab igal erijuhul skeem ise ning reduktori
otstarve.
Hammasrataste
ja laagrite määrimiseks valatakse reduktori keresse niipalju õli,
et ratta hambad ja osa pöida oleksid sellesse sukeldunud. Rataste
kiirel pöörlemisel pritsivad nad õli laiali ning see satub
hambumisse. Voolates mööda kere seinu ja spetsiaalseid
eralduspinnas olevaid kanaleid jõuab õli ka võllide laagritesse.
Selline sukeldusõlitus on
effektiivne , kui rataste ringkiirus on
vähemalt 2,5 m/s. Väiksemate ringkiiruste korral peab iga paari üks
ratas olema sukeldatud õlisse. Kuid kiirustel üle 12m/s ei ole
sukeldusõlitus kasutatav, sest õli intensiivse segamise tõttu
tõuseb õlivanni põhjast sinna sadestunud
mustus üles ning
sattudes hõõrdepinnale, kiirendab hammasrataste ja laagrite
kulumist.
Et
vältida õli väljatungimist võllide ja kaante vahelistest
piludest, kasutatakse õlikindlast kummist või muudest
materjalidest tihendeid.
Õli
nivood kontrollitakse õlivardaga.
Reduktori
kere ja
kaane eralduspinnad on hoolikalt töödeldud (
lihvitud või
kaabitsetud). Kaane ja kere vastastikune asend fikseeritakse kahe
teineteisest võimalikult kaugele paigutatud tihvtiga. Tihvtid on
pressitud aukudesse pinguga ning asetsevad tavaliselt diagonaalselt.
Reduktorite
arvutusReduktoritele
tehakse projekteerimisel kinemaatiline ja tugevusarvutus.
Kinemaatiline
arvutus seisneb reduktori üldise ning ka üksikute astmete
ülekandearvude määramises ja valitud kinemaatikaskeemi
täpsustamises. Astmete vahelised
ülekandearvud määratakse
kindlaks olenevalt ülekande liigist (silinder-,
koonus - või
tiguülekanne ) ning reduktori üldisest ülekandearvust. Viimane
omakorda sõltub sisend- ja väljundvõlli nurkkiirustest.
Tugevusarvutustega
määratakse kindlaks
telgede vahed , moodulid, rataste ja võllide
mõõtmed. Seejuures tehakse ka ülekande hambumiselementide
geomeetriline arvutus. Ühe-, kahe- ja kolmeastmeliste
silinderreduktorite nii üldised kui ka üksikute astmete
ülekandearvud on standardiseeritud.
Standardsete
seeriareduktorite
kasutamisel tehakse nende hammasülekannetele ja
võllidele konkreetseid ekspluatatsioonitingimusi silmas pidades
kontrollarvutus.
Reduktori
arvutamine ja projekteerimine sisaldab järgmisi põhietappe:
- Elektrimootori valik ja reduktori kinemaatiline arvutus.
Elektrimootor valitakse nimivõimsuse ja võlli pöörlemiskiiruse järgi pidades
silmas reduktori konkreetseid töötingimusi. Elektrimootori
nimivõimsuse Ne
määramiseks peab teadma reduktori kasutegurit ηr.
Siis
kus
N on võimsus reduktori väljundvõllil.
- Reduktori võllide orienteeriv arvutus.
- Hammas- ja tiguülekannete arvutus.
- Laagrite valik.
- Reduktori eskiisjoonis.
- Võllide lõplik arvutus.
Reduktori
kere konstruktsioonielemendid määratakse empiiriliste
valemitega ,
mida võib leida
masinaelementide
teatmekirjandusest.





















Kõik kommentaarid