INSENERIFÜÜSIKA/INSENERIMEHAANIKA TEOREETILISE OSA KORDAMISKÜSIMUSED TEEMA 1. STAATIKA PÕHIMÕISTED. JÕUD. JÕU PROJEKTSIOON, JÕUDUDE LIITMINE. SIDEMED JA SIDEMETE REAKTSIOONID 1. Defineeri jõud ja jõu mõõtühik- Suurust, mis on kehade vastastikuse mõju mõõduks, nimetatakse jõuks. Jõud on vektor, mida tähistame F.Jõu mõõtühik on njuuton (N). 2. Defineeri koonduv jõusüsteem- koonduvasse jõusüsteemi kuuluvate jõudude mõjusirged lõikuvad ühes ja samas punktis. paralleeljõudude süsteem- paralleeljõudude süsteemi kuuluvate jõudude mõjusirged on paralleelsed. üldine jõusüsteem- jõusüsteemi, mis pole ei koonduv jõusüsteem ega
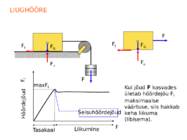
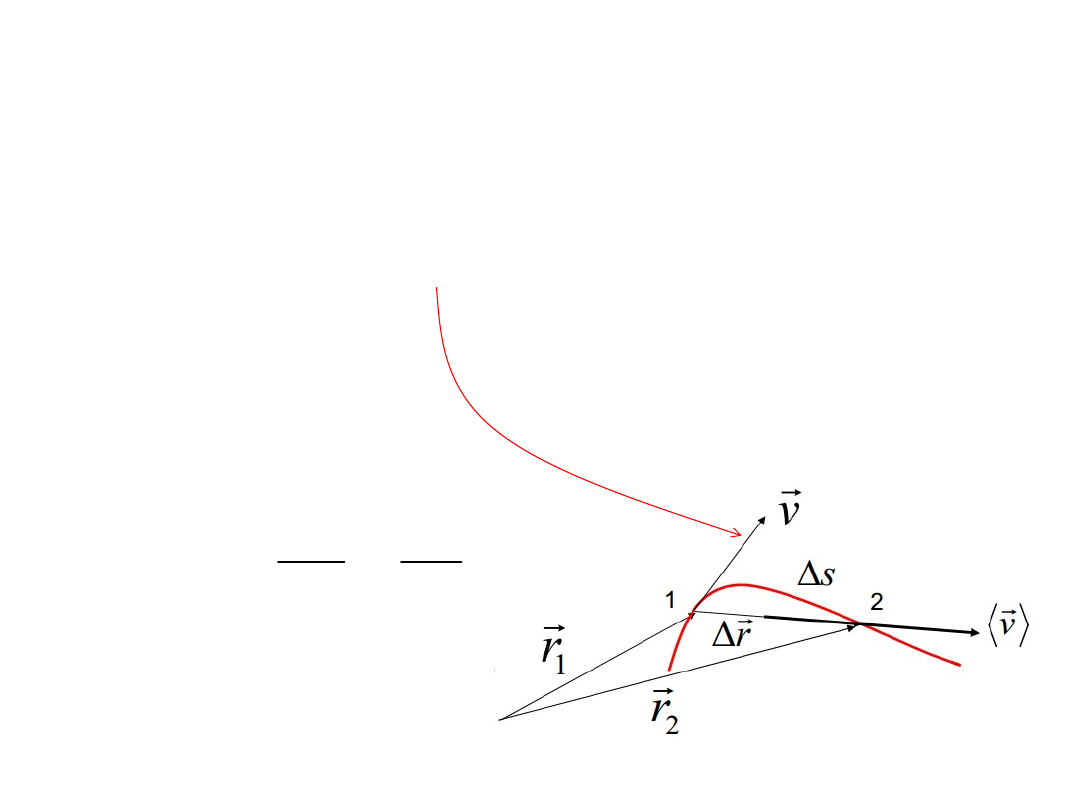
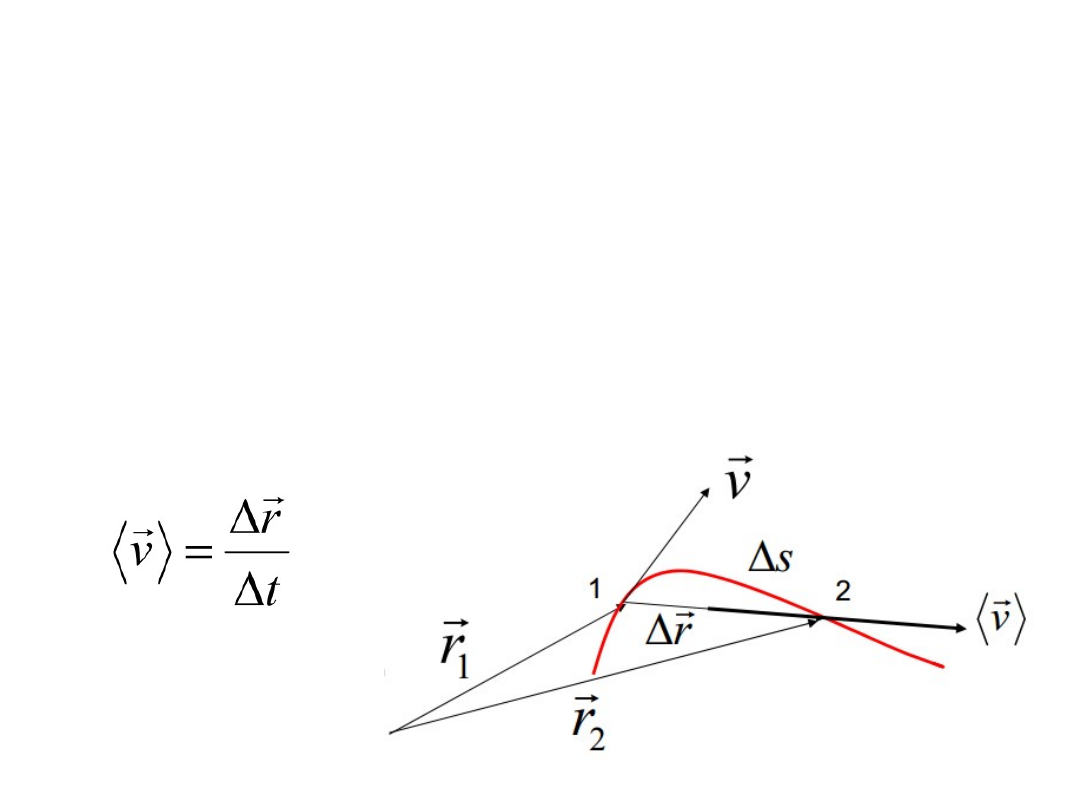
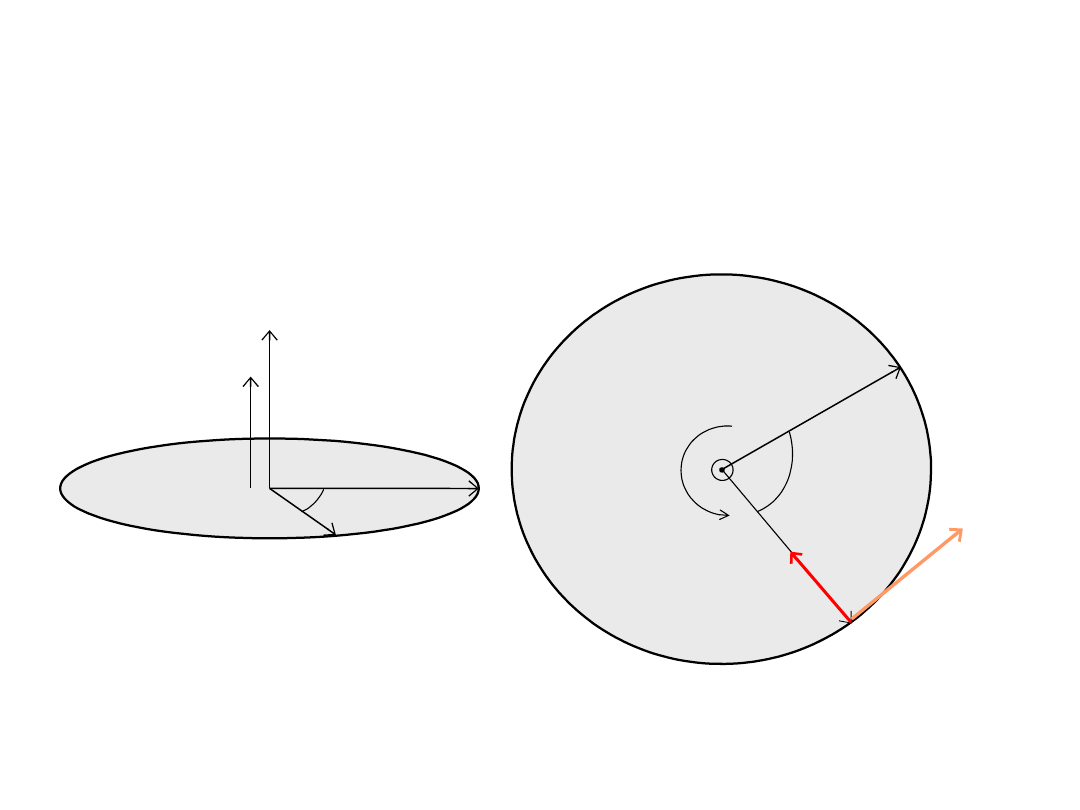
r d = dt at = r d r r r = at = × r dt r r > 0 r r < 0 Dünaamika 10. N I seadus. Inertsiaalsed taustsüsteemid. Galilei relatiivsusprintsiip. N I s ehk inertsiseadus Iga keha püsib paigal või liigub ühtlaselt sirgjooneliselt seni, kuni teiste kehade mõju ei muuda selle keha liikumisolekut. Inertsiks nimetatakse kõigi kehade visa püüdu säilitada ühtlase liikumise olekut(sealhulgas paigalseisu). Inertsiaalne taustsüsteem Selline materiaalne taustsüsteem, milles inertsiseadus kehtib täiesti täpselt ehk süsteemis olev keha liigub ühtlaselt sirgjooneliselt, kuni talle ei mõju mõni süsteemis olev jõud. Näiteks kiirendusega liikuv buss ei ole inertsiaalne taustsüsteem. Kaal
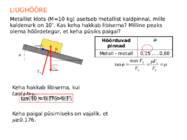
Tulemuseks saame m1 a + m 2 a = P1 - P2 . Asendades P1 = m1 g ja P2 = m 2 g ning võttes kiirendused sulgude ette (m1 + m2 ) a = (m1 - m 2 ) g saame kiirenduse m1 - m2 a= g . m1 + m 2 Asendades arvandmed, saame koormuste kiirenduseks 2 -1 a=( 9,8 ) m / s 2 = 3,3 m / s 2 . 2 +1 Vastus: koormused hakkavad liikuma kiirendusega 3,3 m / s 2 . Seejuures liigub suurema massiga koormus alla ja väiksema massiga koormus üles (meie oletus kehade liikumise kohta oli õige, kuna kiirenduse väärtus tuli positiivne). Lahendus 2. Kui meid huvitab ainult kiirendus, nagu antud ülesandes nõutakse, siis saab selle leida lihtsamalt, arvestades, et kiirendus on arvutatav kogujõu ja massi suhtest. Kehadele mõjuvad nende raskusjõud, mis püüavad panna kehi liikuma eri suundades, seetõttu on nende kogujõud võrdne jõudude vahega, kusjuures suuremast jõust tuleb lahutada väiksem Fk = P1 - P2 = (m1 - m 2 ) g .
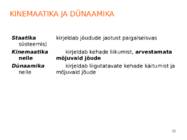
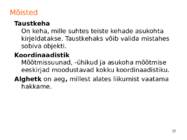
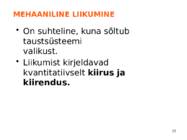
1. Teoreetilise mehaanika aine. Teoreetilise mehaanika osad (staatika, kinemaatika, dünaamika, analüütiline mehaanika). Insenerimehaanika. *Mehaanika on teadus reaalsete objektide liikumisest. * Teoreetiline mehaanika on mehaanika osa, mis uurib absoluutselt jäikade kehade paigalseisu ja liikumist nendele kehale rakendatud jõudude mõjul. Absoluutselt jäigaks kehaks nimetame keha, mille kahe mistahes punkti vaheline kaugus on jääv sõltumatult kehale toimivatest välismõjutustest (jõududest). *Seega: absoluutselt jäigas kehas ei toimu iialgi mitte mingisuguseid deformatsioone. On aga selge, et absoluutselt jäiga keha mõiste on abstraktsioon, sest kõik reaalsed kehad tegelikult ikkagi deformeeruvad välisjõudude mõjul.
Tulemuseks saame m1 a + m 2 a = P1 − P2 . Asendades P1 = m1 g ja P2 = m 2 g ning võttes kiirendused sulgude ette (m1 + m2 ) a = (m1 − m 2 ) g saame kiirenduse m1 − m2 a= g . m1 + m 2 Asendades arvandmed, saame koormuste kiirenduseks 2 −1 a=( ⋅ 9,8 ) m / s 2 = 3,3 m / s 2 . 2 +1 Vastus: koormused hakkavad liikuma kiirendusega 3,3 m / s 2 . Seejuures liigub suurema massiga koormus alla ja väiksema massiga koormus üles (meie oletus kehade liikumise kohta oli õige, kuna kiirenduse väärtus tuli positiivne). Lahendus 2. Kui meid huvitab ainult kiirendus, nagu antud ülesandes nõutakse, siis saab selle leida lihtsamalt, arvestades, et kiirendus on arvutatav kogujõu ja massi suhtest. Kehadele mõjuvad nende raskusjõud, mis püüavad panna kehi liikuma eri suundades, seetõttu on nende kogujõud võrdne jõudude vahega, kusjuures suuremast jõust tuleb lahutada väiksem Fk = P1 − P2 = (m1 − m 2 ) g .
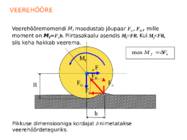
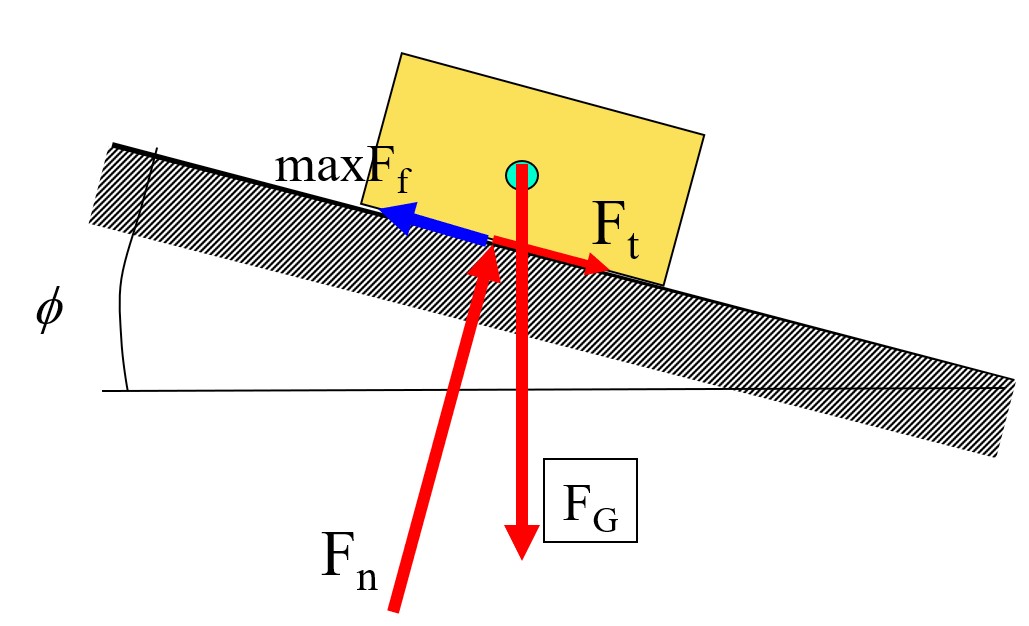
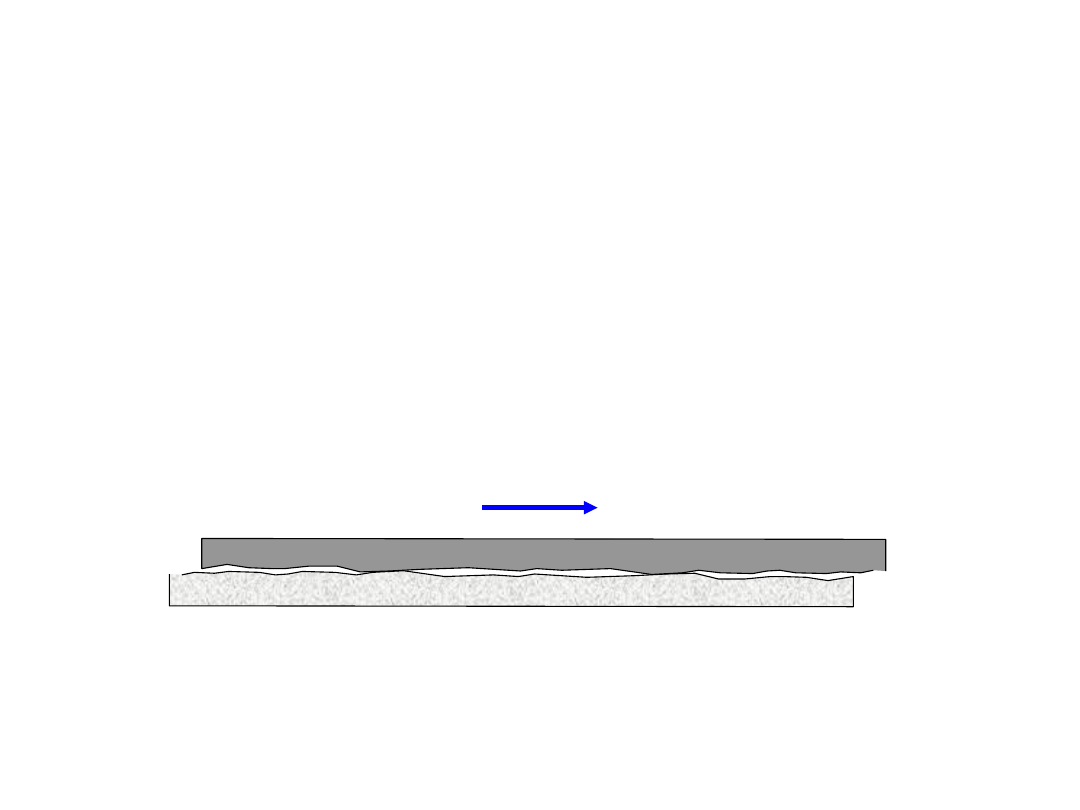
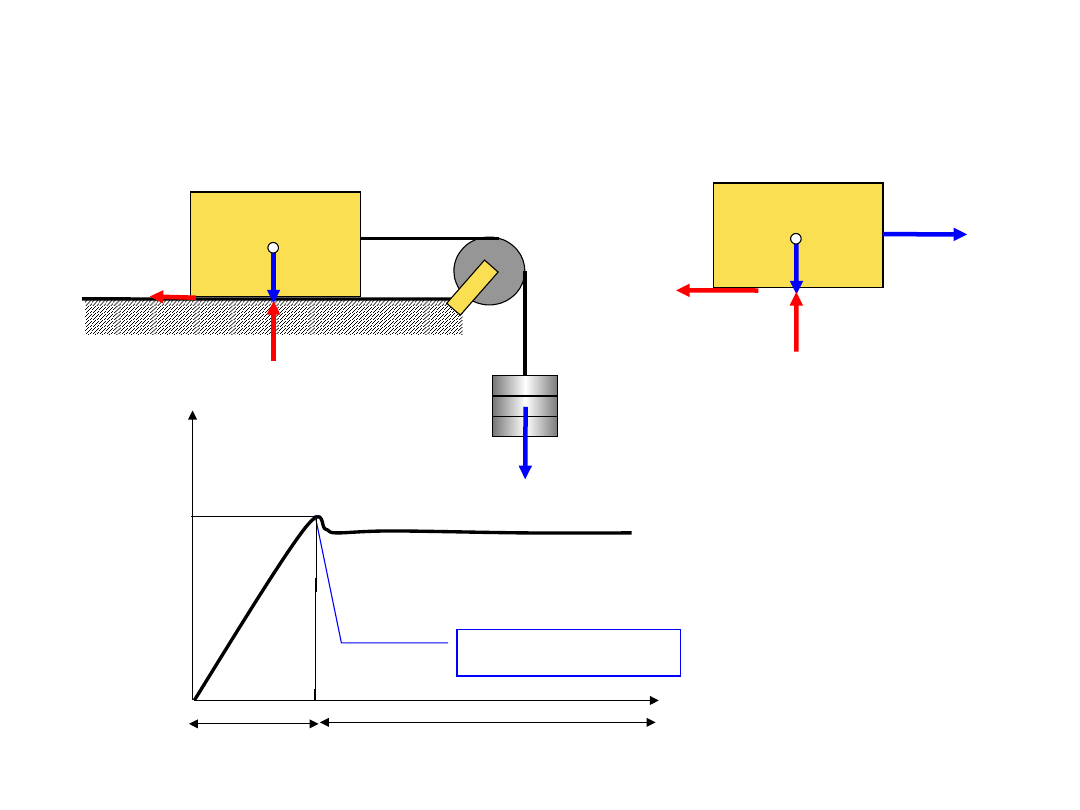
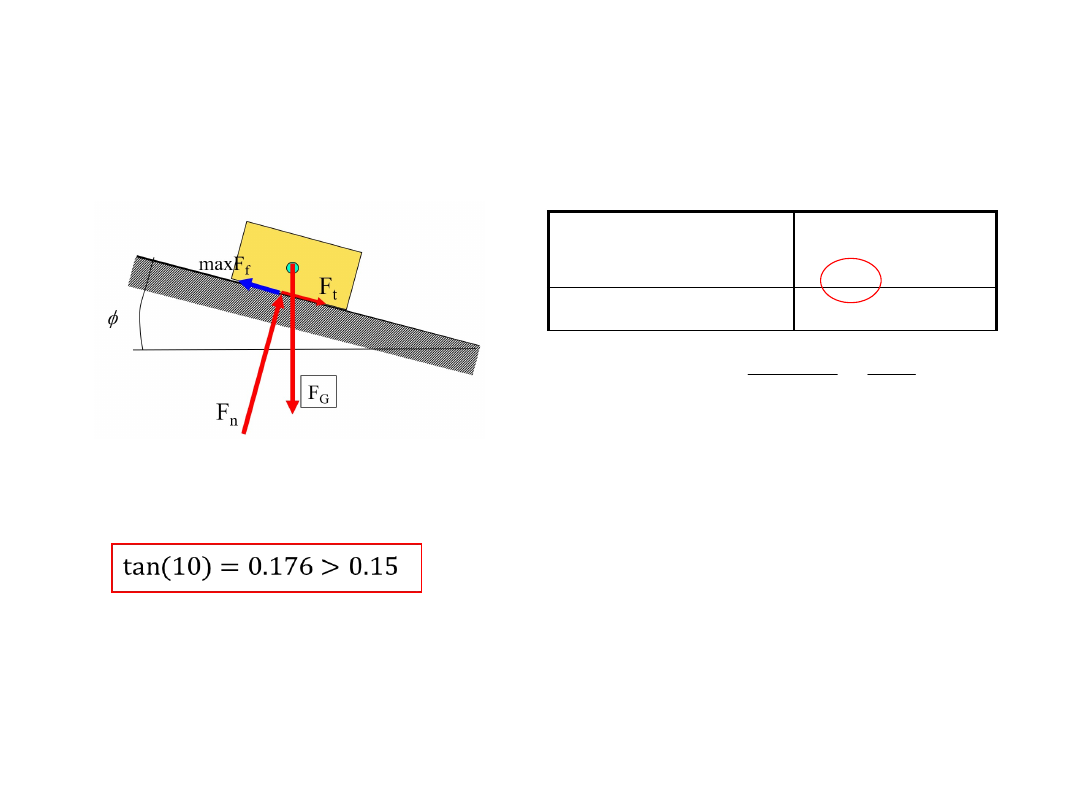
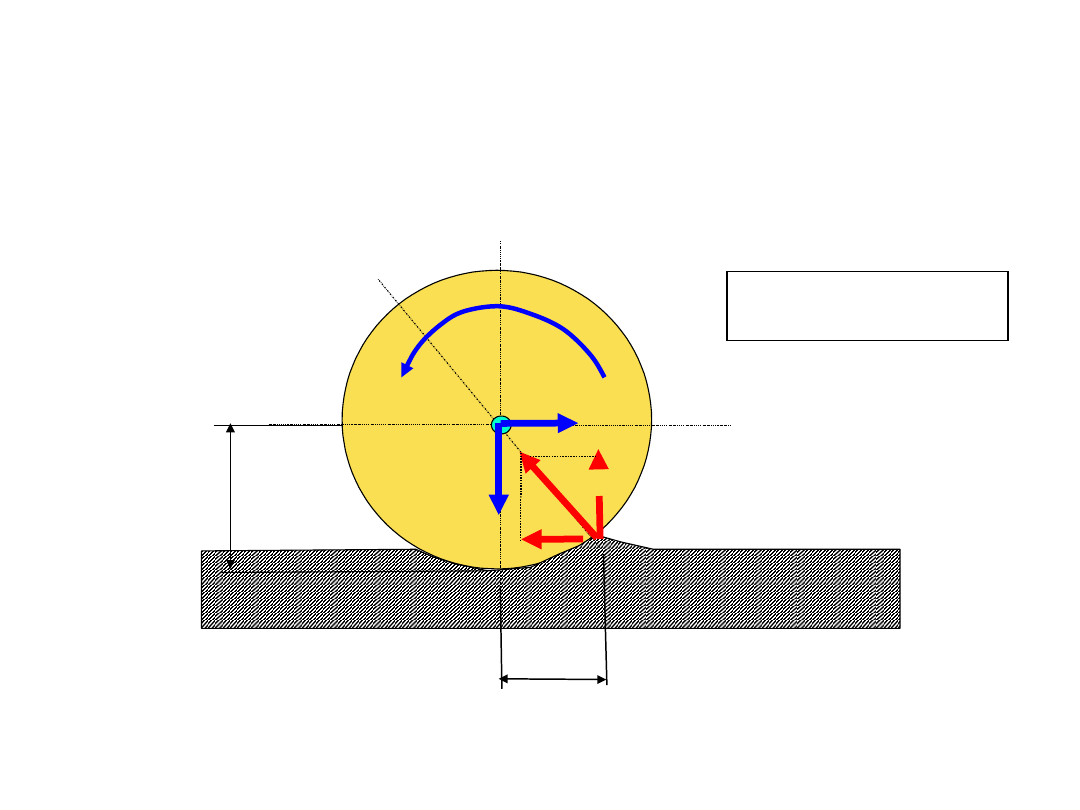
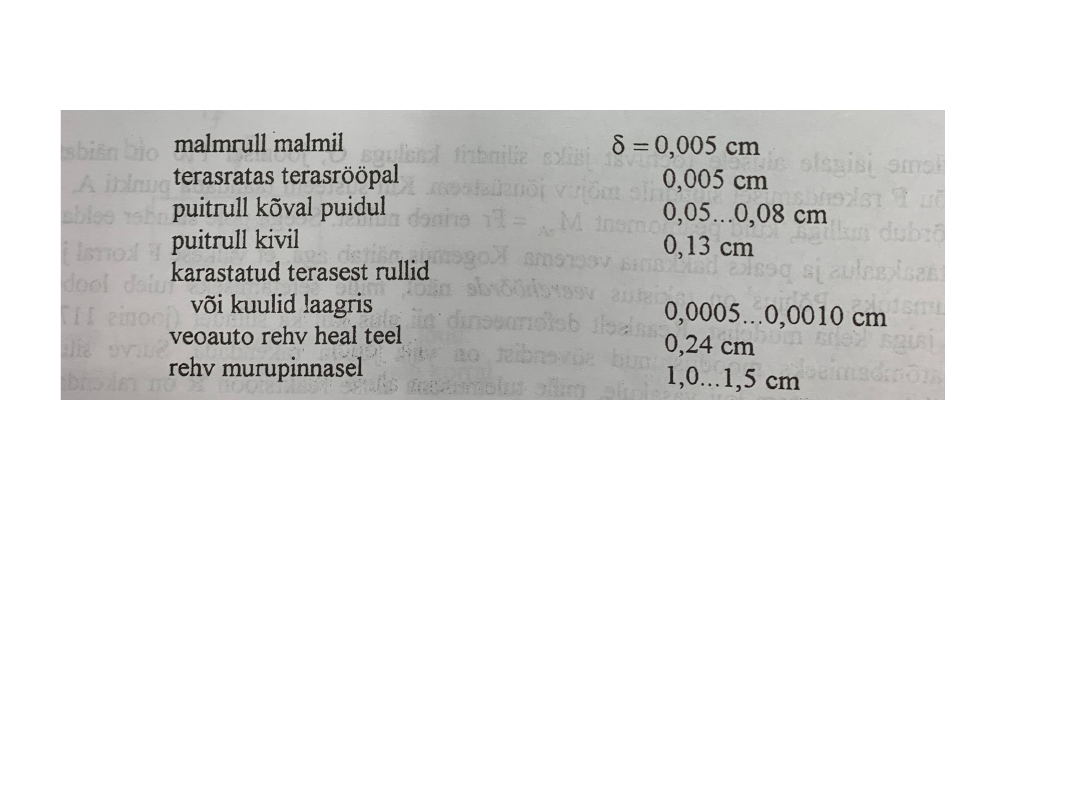
võetud momendi projektsiooniga sellel teljel. Jõu moment telje suhtes on skalaarne suurus, mis on võrdne selle teljega ristuval tasapinnal võetud jõu projektsiooni momendi mooduliga tasapinna ja telje lõikepunkti suhtes võetava vastava märgiga. Jõu moment telje suhtes on võrdne nulliga, kui jõu mõjusirge on teljega paralleelne. 8. Varignoni teoreem resultandi momendi kohta telje suhtes Kui jõusüsteem taandub resultandiks, siis selle resultantne moment mingi telje suhtes on võrdne süsteemi kõikide jõudude momentide algebralise summaga sama telje suhtes. Mx(F)=sigma i=1...n Mxi jne 9. Veerehõõrdejõud ja veerehõõrdemoment Horisontaalsele pinnale asetatud silindri veeretamiseks peame rakendama rõhtsuunalist jõudu. Silindri poolt temale veeretamiseks avaldatud takistust nim veerehõõrdeks. Veerehõõrde põhjuseks on asjaolu, et aluspind veereva keha all mõnevõrra deformeerub. Eha alla tekib väike lohk, millest on vaja keha välja tõmmata
PUITKONSTRUKTSIOONIDE ABIMATERJAL EVS-EN 1995-1-1:2005 EUROKOODEKS 5 Puitkonstruktsioonide projekteerimine Osa 1-1: Üldreeglid ja reeglid hoonete projekteerimiseks Koostas: Georg Kodi PUITKONSTRUKTSIOONID –ABIMATERJAL 1/106 Georg Kodi TALLINNA TEHNIKAÜLIKOOL ehitiste projekteerimise instituut SISUKORD 1. PUIDU TUGEVUSKLASSID..................................................................................................................... 4 2. MATERJALI VARUTEGURID ................................................................................................................ 10 2.1 Kandepiirseisund ............................................................................................................................. 10 2.2 Kasutuspiirseisund........................................................................................................................... 14 2.3 Elam
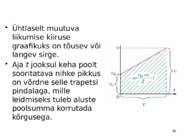
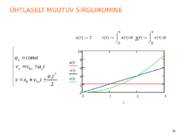
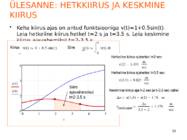
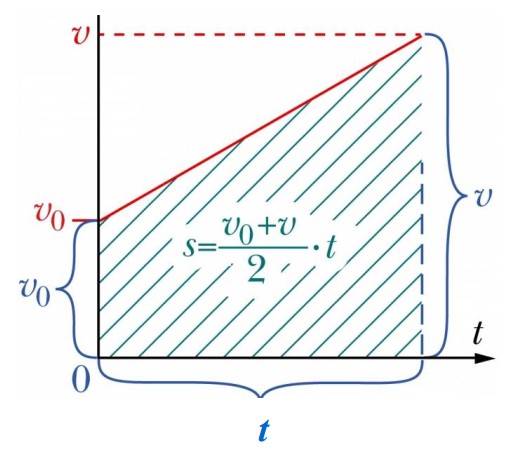
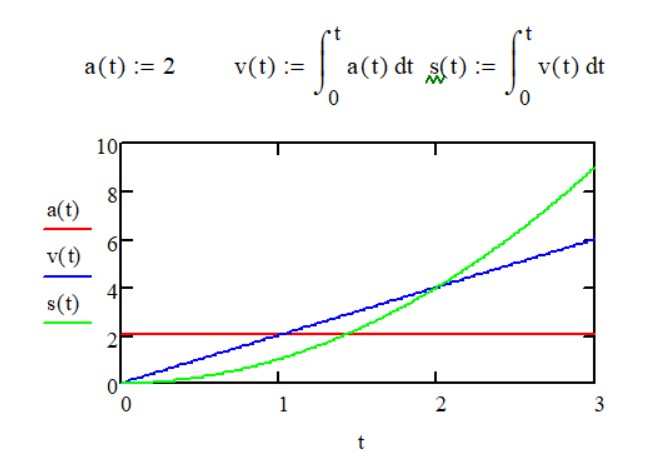
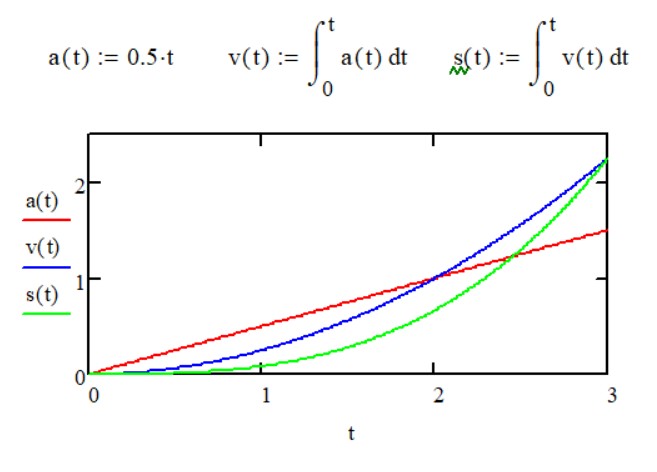
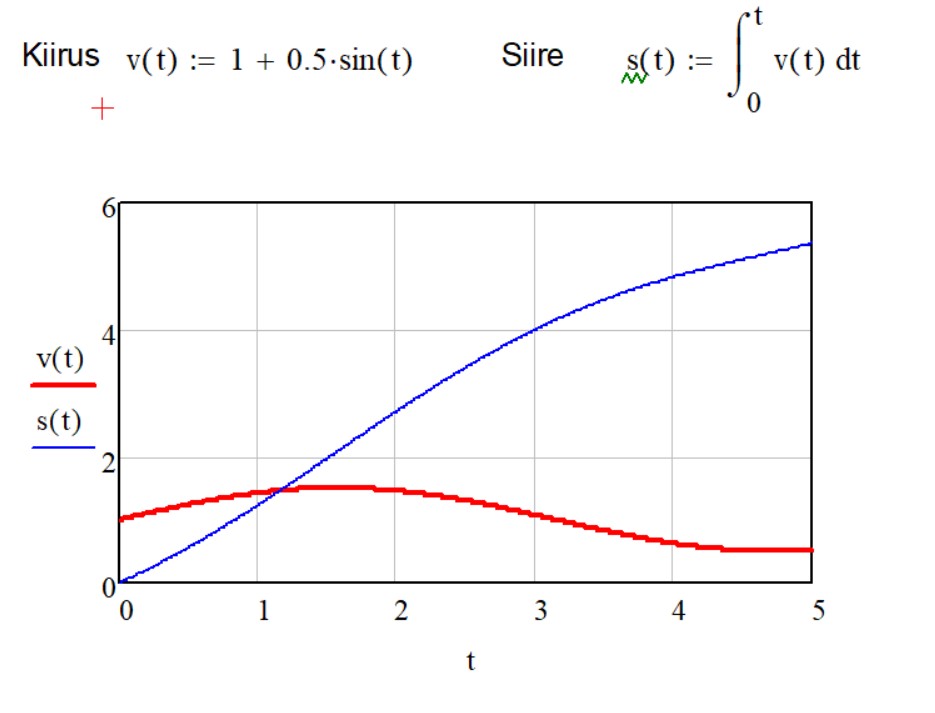
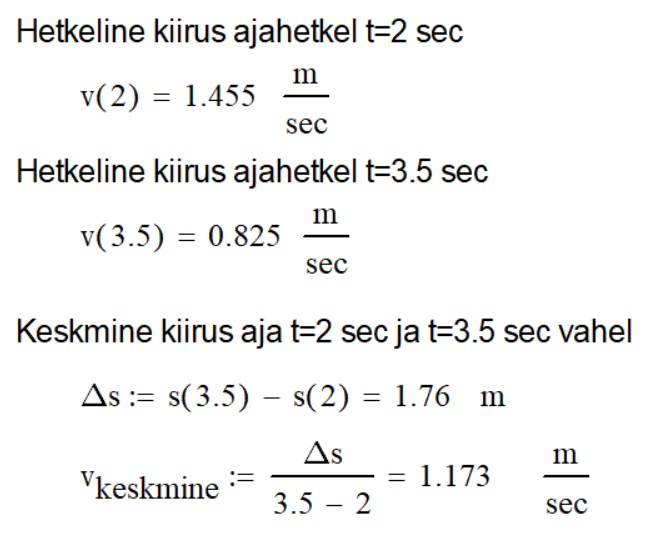
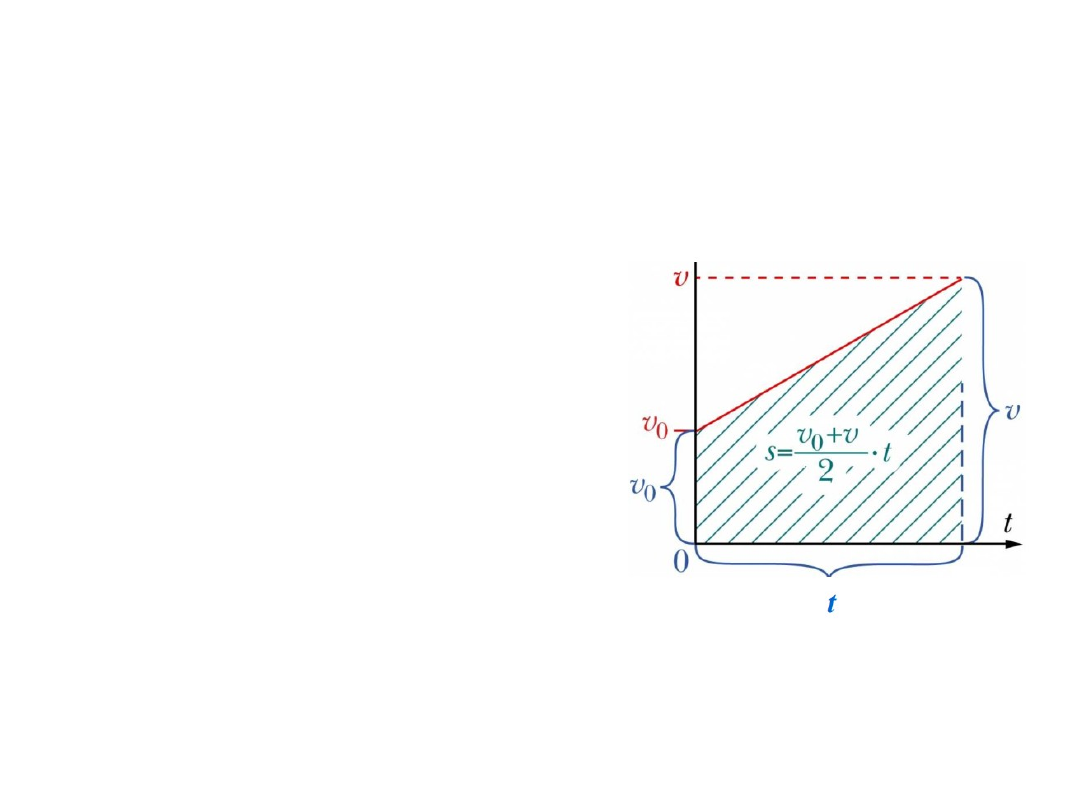
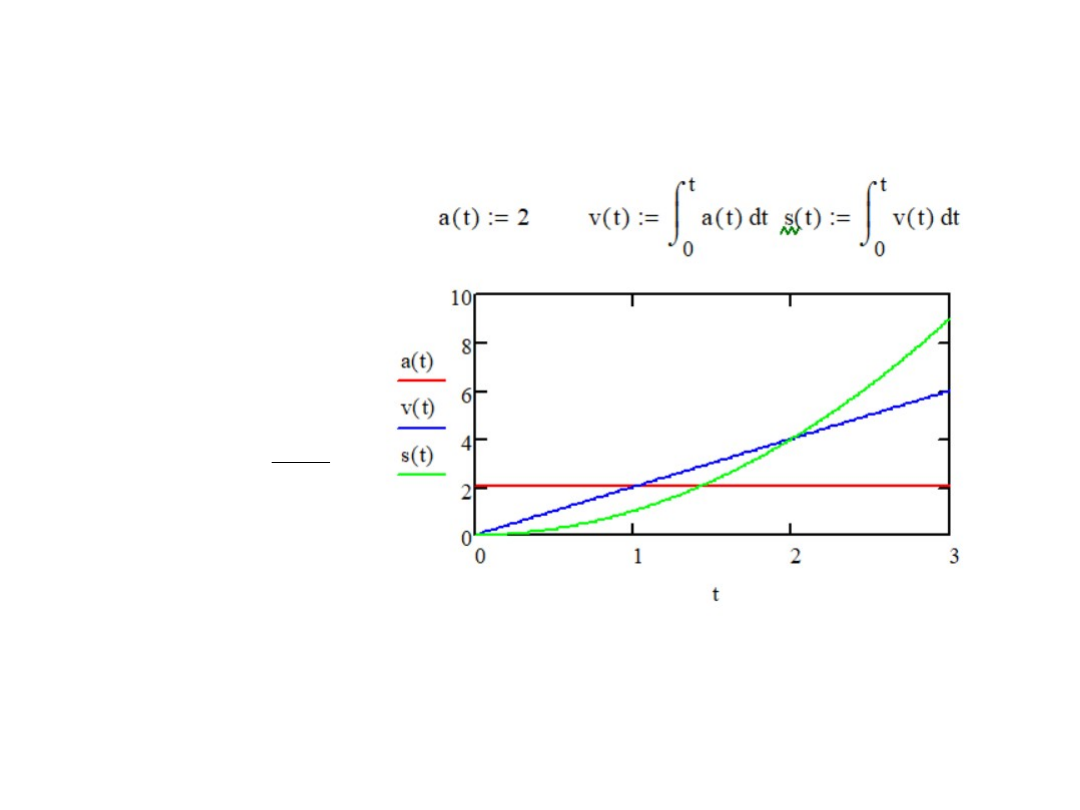
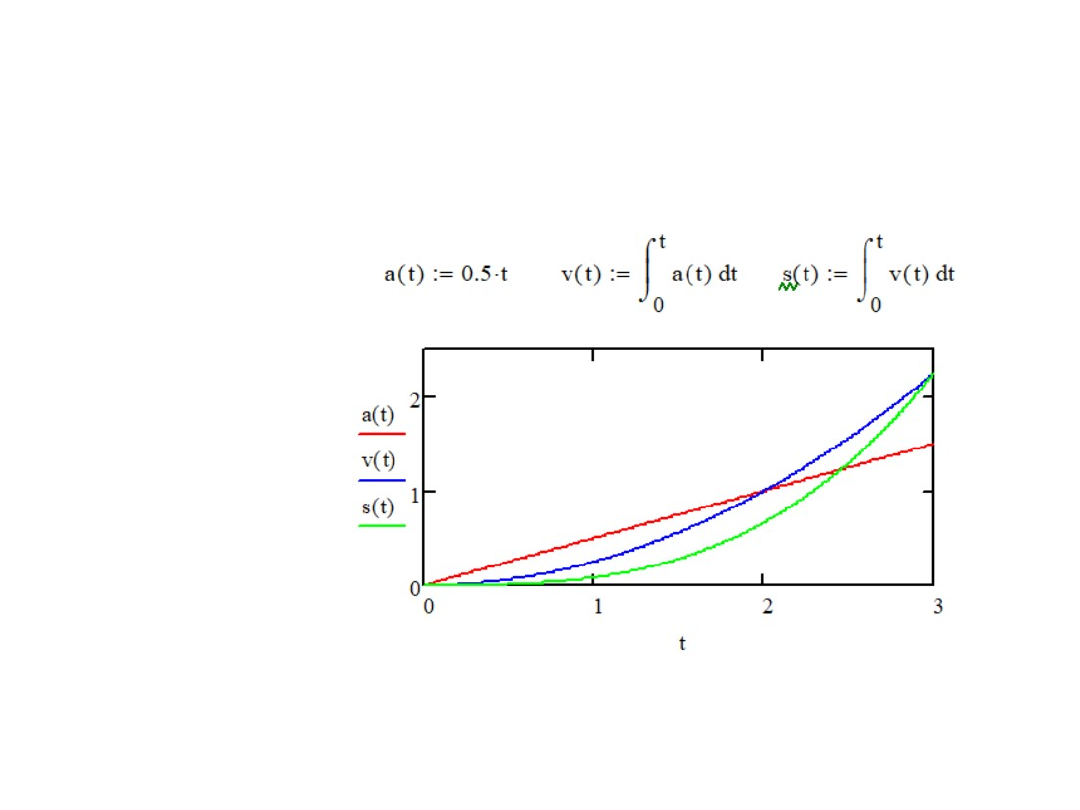
7. Liikumisvõrrandid- Ühtlase liikumise liikumisvõrrand- x = x0 + vt (m) a t2 gt2 Ühtlaselt kiireneva liikumise liikumisvõrrand- x = x0 + v0t + (m) **h = h0 + v0t + ** 2 2 8. Vabalangemine ja viskekeha liikumine (miks, kuidas toimub, mis eripärad on?) Vaba langemine- kehade langemine vaakumis ehk õhuttühjas ruumis. Vaakumis puudub õhutakistus-> kehad langevad Maa külgetõmbe toimel õhutühjas ruumis ühesuguse kiirendusega(kiirendus on võrdne). See on ühtlaselt muutuv liikumine ja kiirendus ei sõltu keha massist/materjalist/kujust. Maa külgetõmbejõud ehk raskusjõud tõmbab kõiki kehasi enda poole samatugeva jõuga. Eripärand on raskuskiirendust-> vabalangemise kiirendus (tähis g; suunatud alati alla Maa keskpukti poole). Enamasti on 9,8 m/s2






































Kõik kommentaarid