INSENERIFÜÜSIKA I KT kordamine (0)
INSENERIFÜÜSIKA/INSENERIMEHAANIKA TEOREETILISE OSA
KORDAMISKÜSIMUSED
TEEMA 1. STAATIKA PÕHIMÕISTED. JÕUD. JÕU PROJEKTSIOON,
JÕUDUDE LIITMINE. SIDEMED JA SIDEMETE REAKTSIOONID
1. Defineeri jõud ja jõu mõõtühik- Suurust, mis on kehade vastastikuse mõju mõõduks,
nimetatakse jõuks. Jõud on vektor, mida tähistame F.Jõu mõõtühik on njuuton (N).
2. Defineeri
koonduv jõusüsteem- koonduvasse jõusüsteemi kuuluvate jõudude mõjusirged
lõikuvad ühes ja samas punktis.
paralleeljõudude süsteem- paralleeljõudude süsteemi kuuluvate jõudude mõjusirged
on paralleelsed.
üldine jõusüsteem- jõusüsteemi, mis pole ei koonduv jõusüsteem ega
paralleeljõudude süsteem, nimetatakse üldiseks jõusüsteemiks
tasapinnaline jõusüsteem- tasapinnalisse jõusüsteemi kuuluvate jõudude mõjusirged
asuvad ühel ja samal tasandil
ruumiline jõusüsteem- ruumilisse jõusüsteemi kuuluvate jõudude mõjusirged ei asu
ühel ja samal tasandil
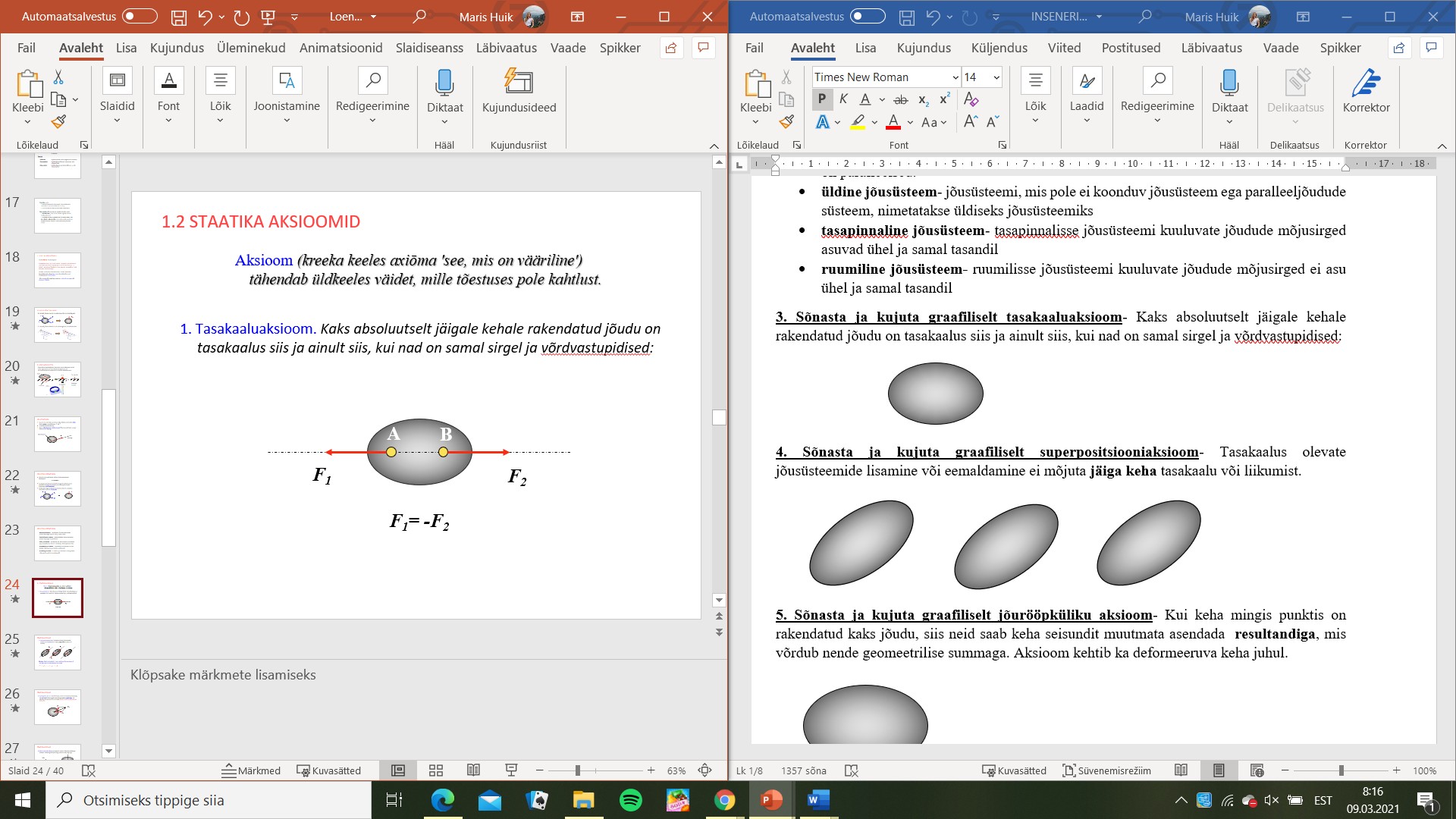
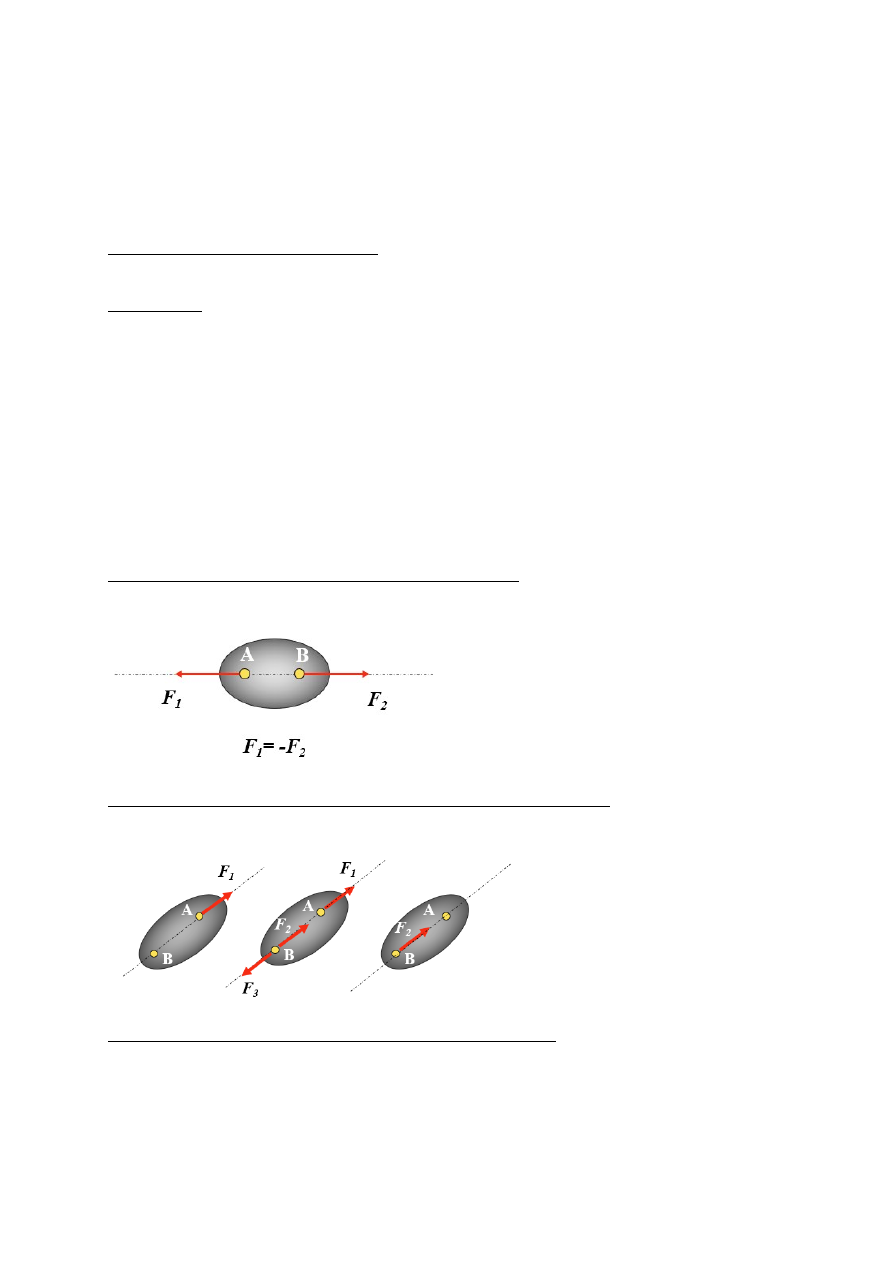
3. Sõnasta ja kujuta graafiliselt tasakaaluaksioom- Kaks absoluutselt jäigale kehale
rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised:
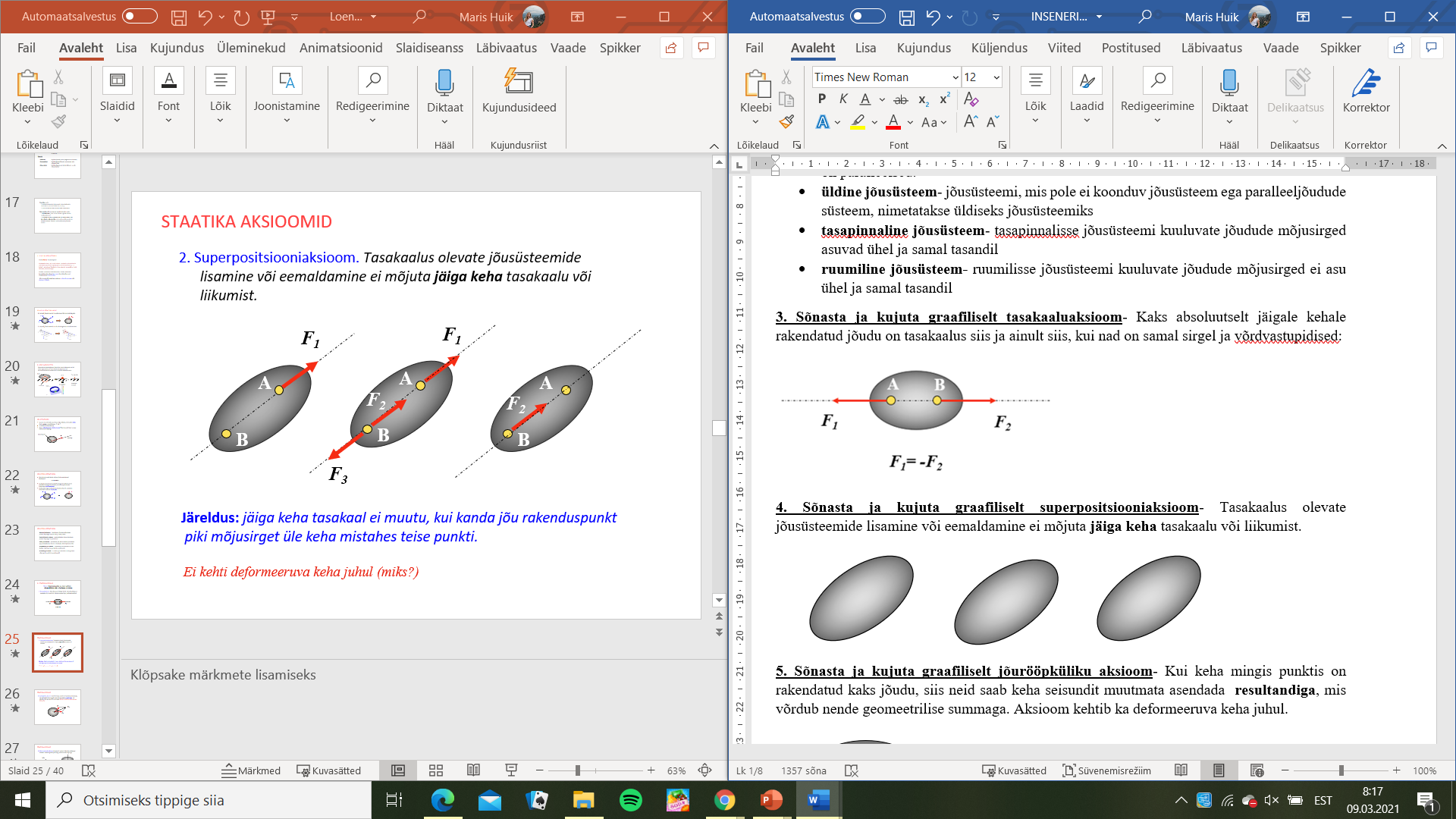
4. Sõnasta ja kujuta graafiliselt superpositsiooniaksioom- Tasakaalus olevate
jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist.
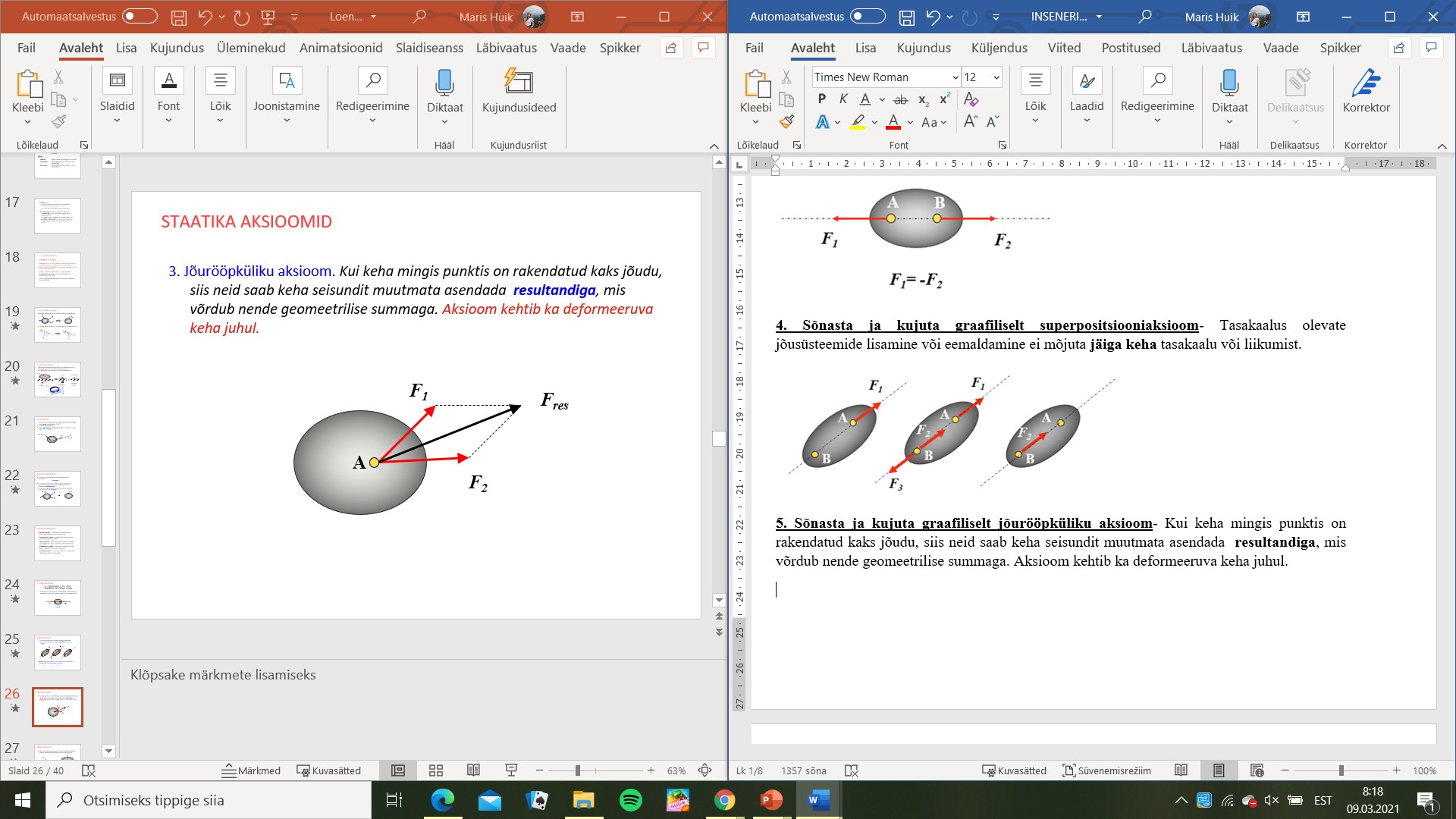
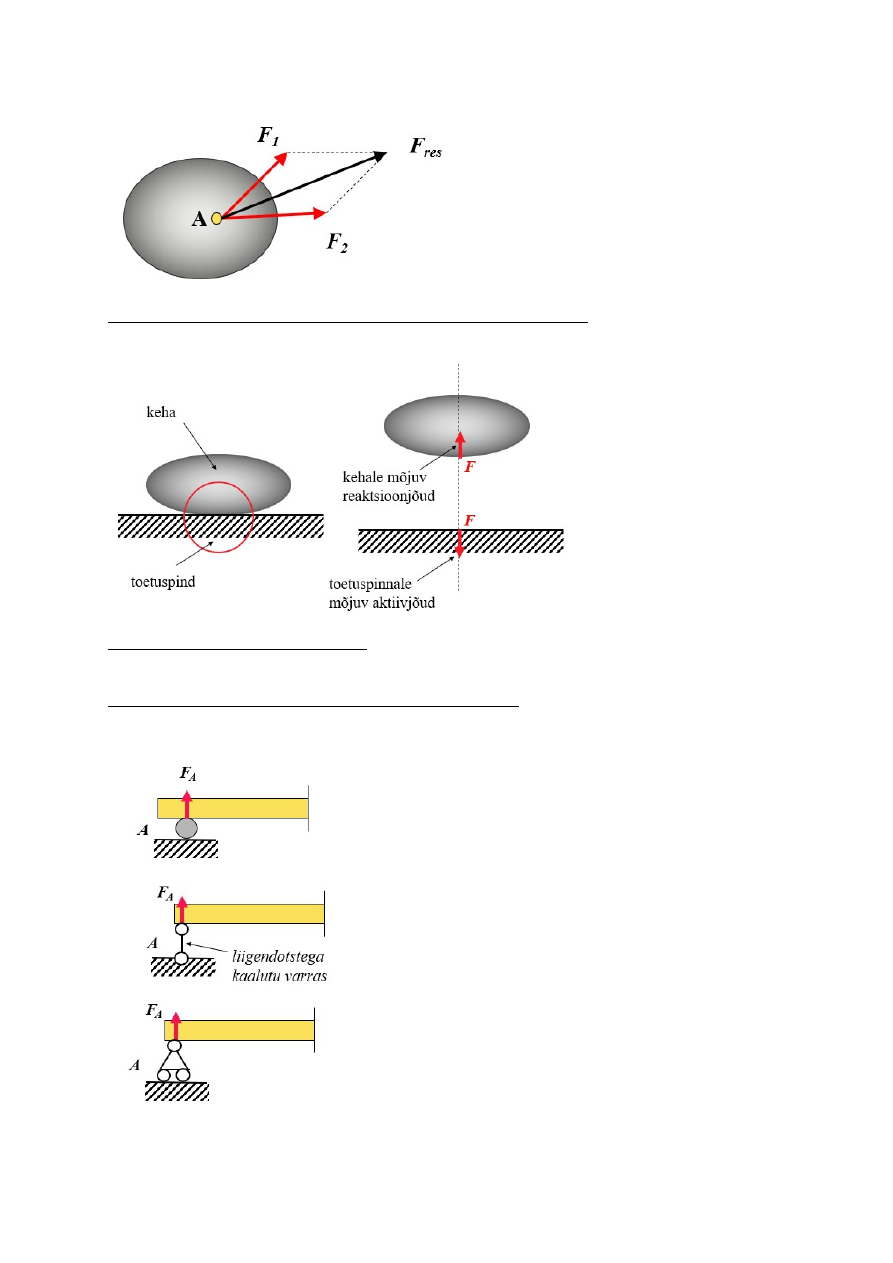
5. Sõnasta ja kujuta graafiliselt jõurööpküliku aksioom- Kui keha mingis punktis on
rakendatud kaks jõudu, siis neid saab keha seisundit muutmata asendada resultandiga, mis
võrdub nende geomeetrilise summaga. Aksioom kehtib ka deformeeruva keha juhul.
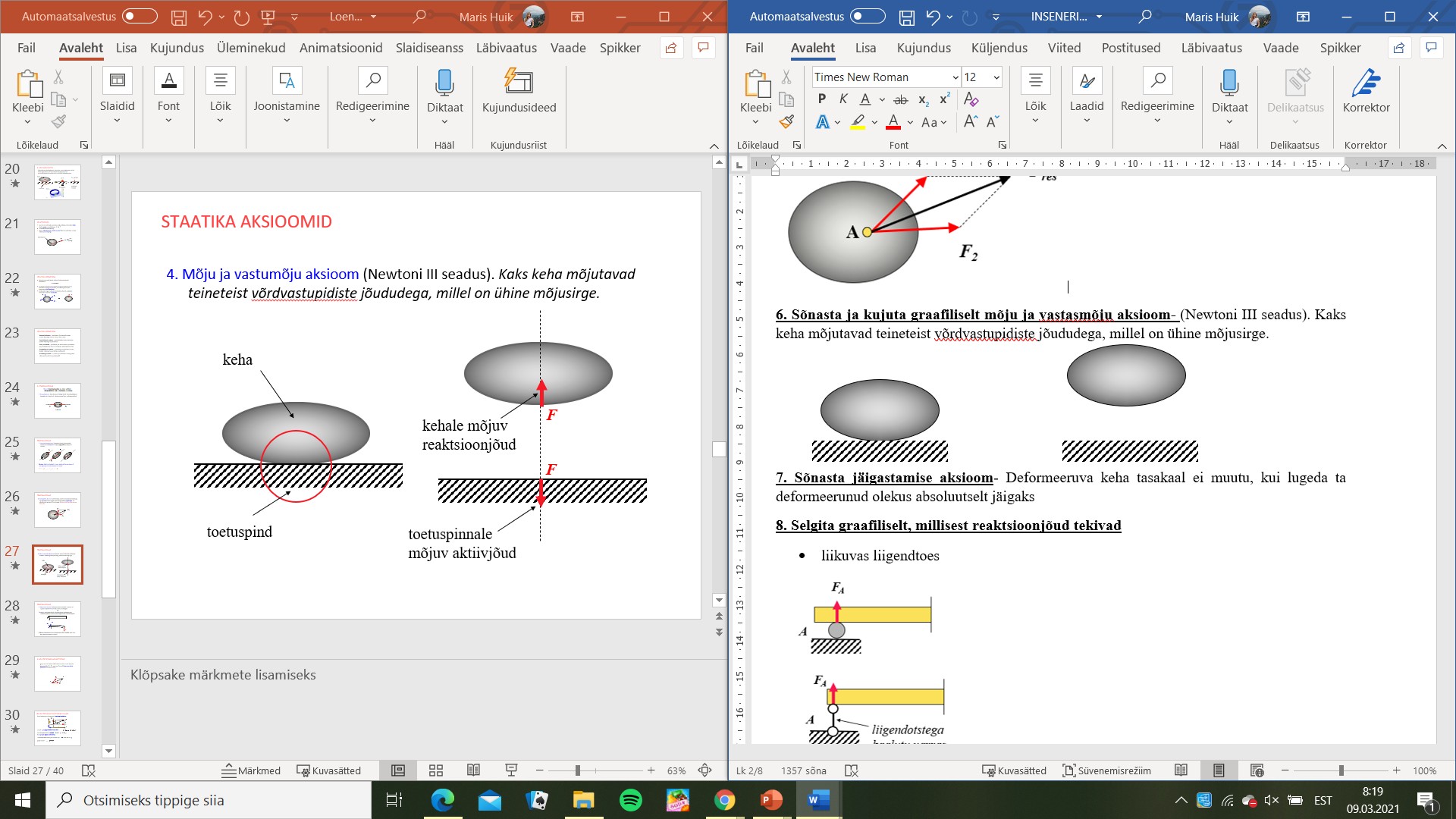
6. Sõnasta ja kujuta graafiliselt mõju ja vastasmõju aksioom- (Newtoni III seadus). Kaks
keha mõjutavad teineteist võrdvastupidiste jõududega, millel on ühine mõjusirge.
7. Sõnasta jäigastamise aksioom- Deformeeruva keha tasakaal ei muutu, kui lugeda ta
deformeerunud olekus absoluutselt jäigaks
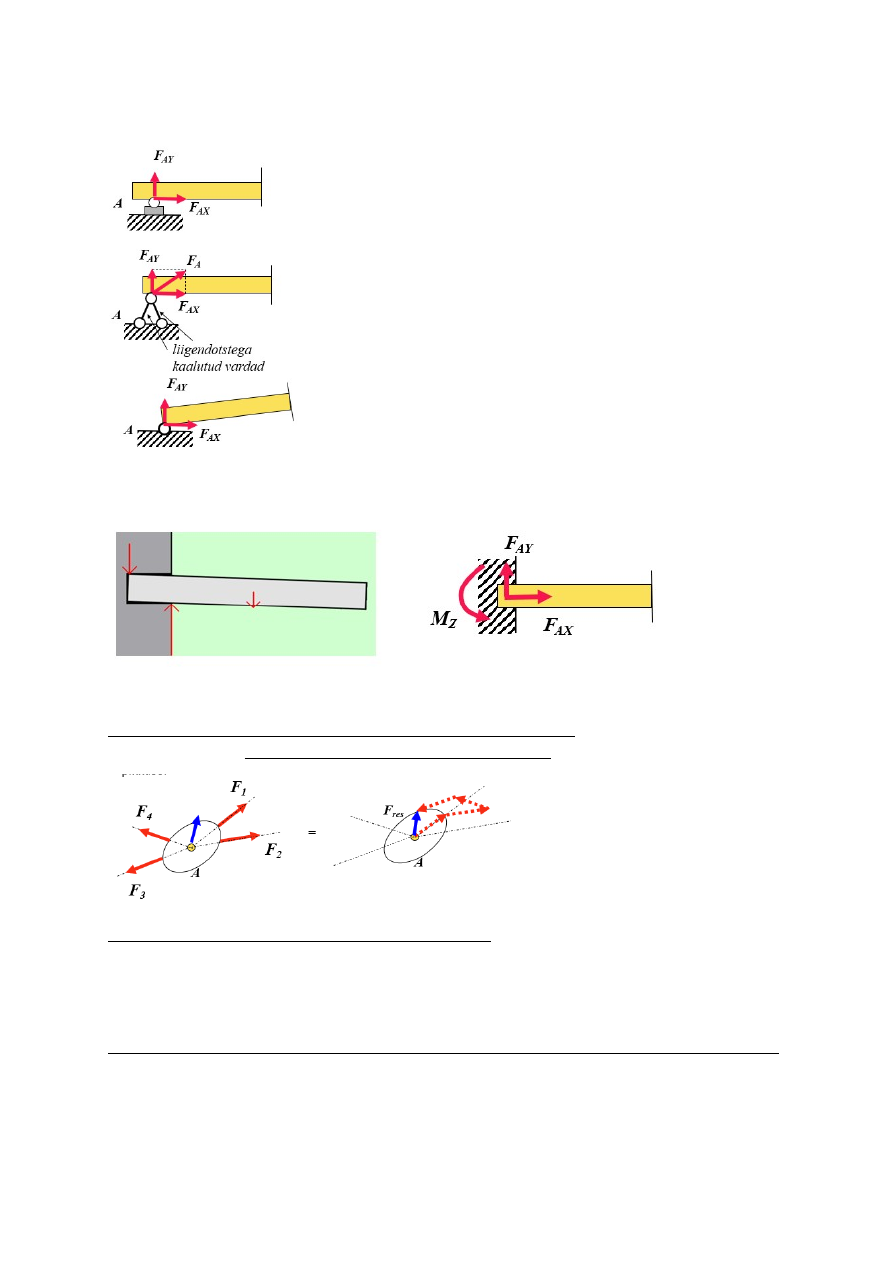
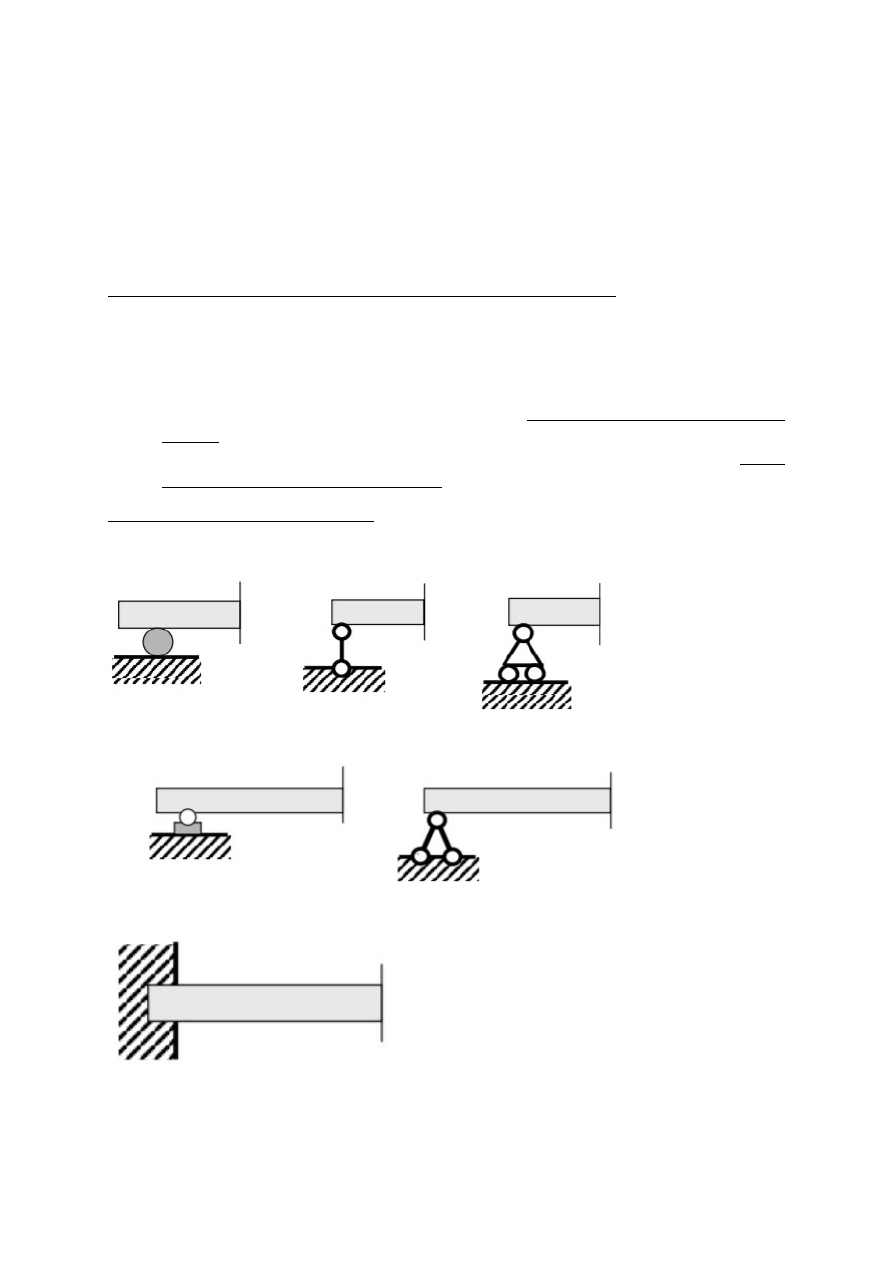
8. Selgita graafiliselt, millisest reaktsioonjõud tekivad
liikuvas liigendtoes
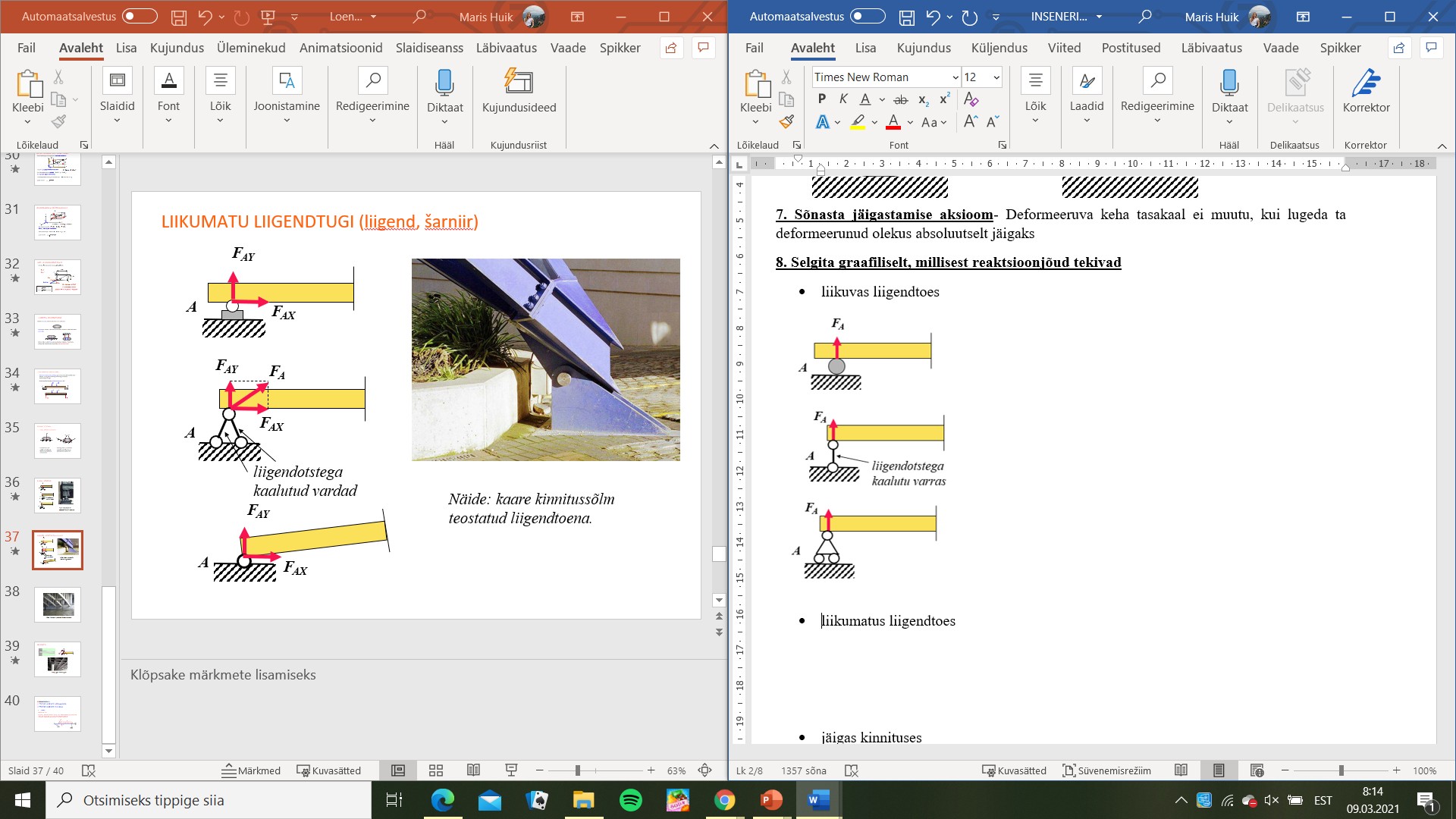
liikumatus liigendtoes
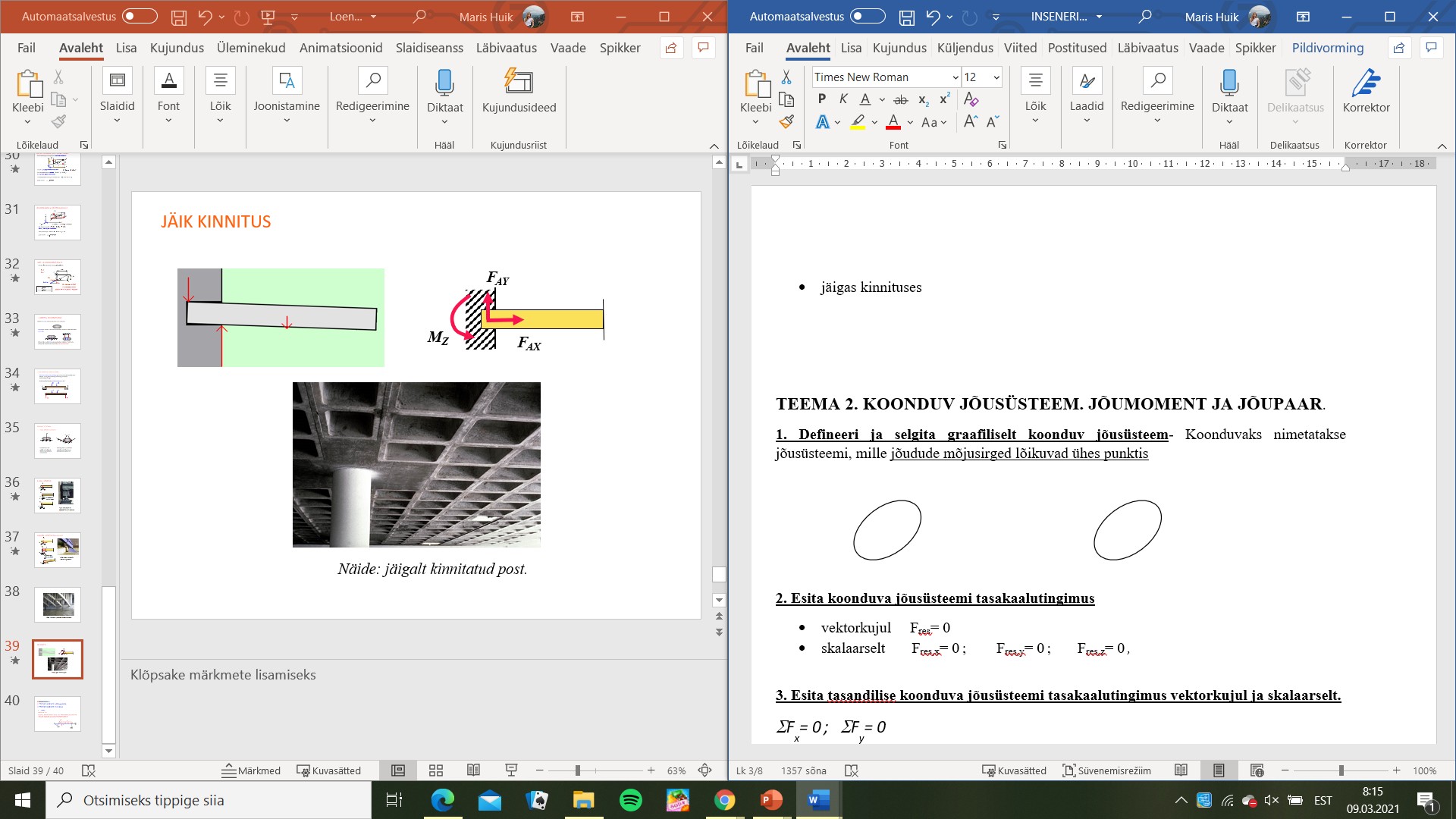
jäigas kinnituses
TEEMA 2. KOONDUV JÕUSÜSTEEM. JÕUMOMENT JA JÕUPAAR.
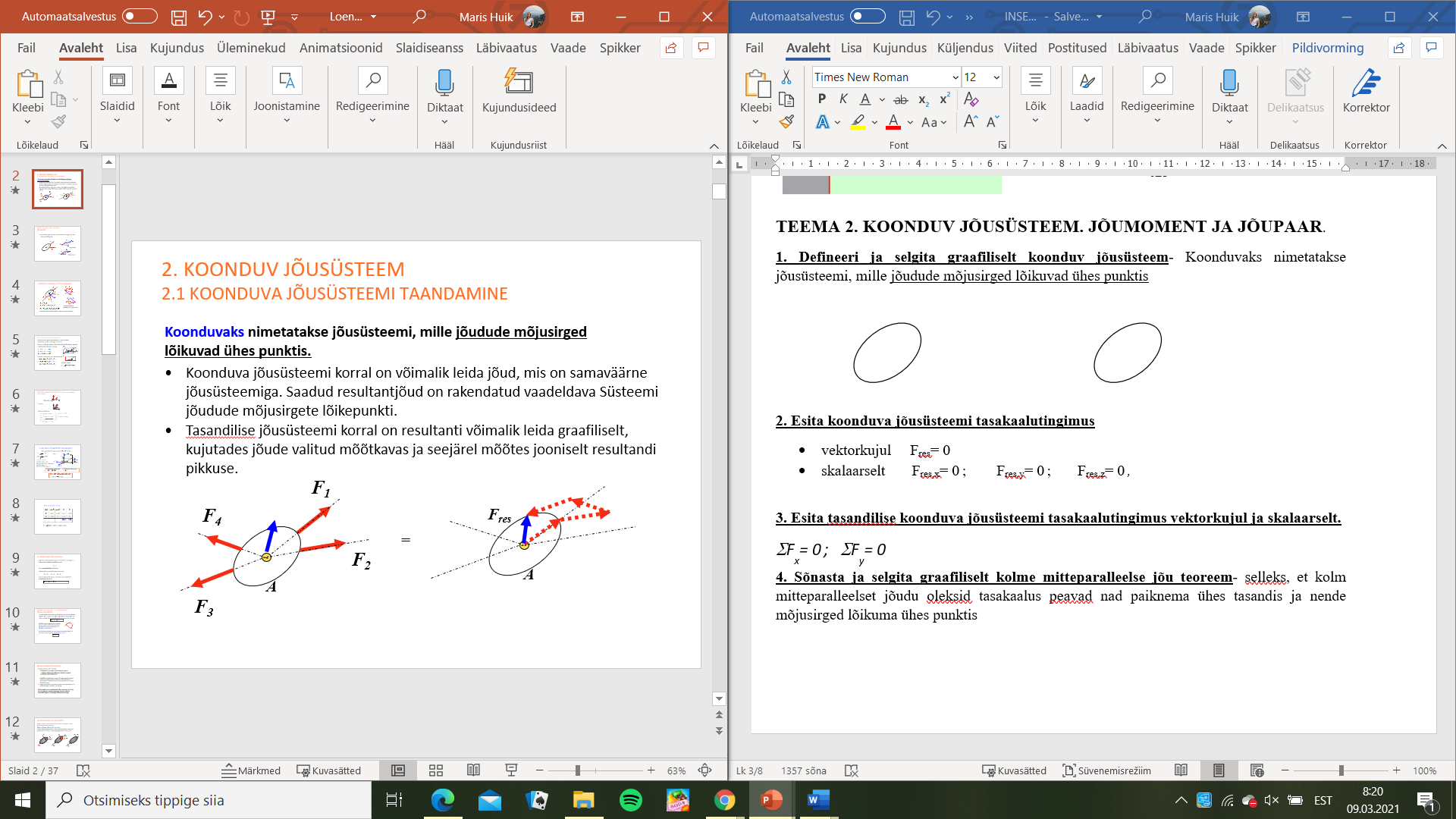
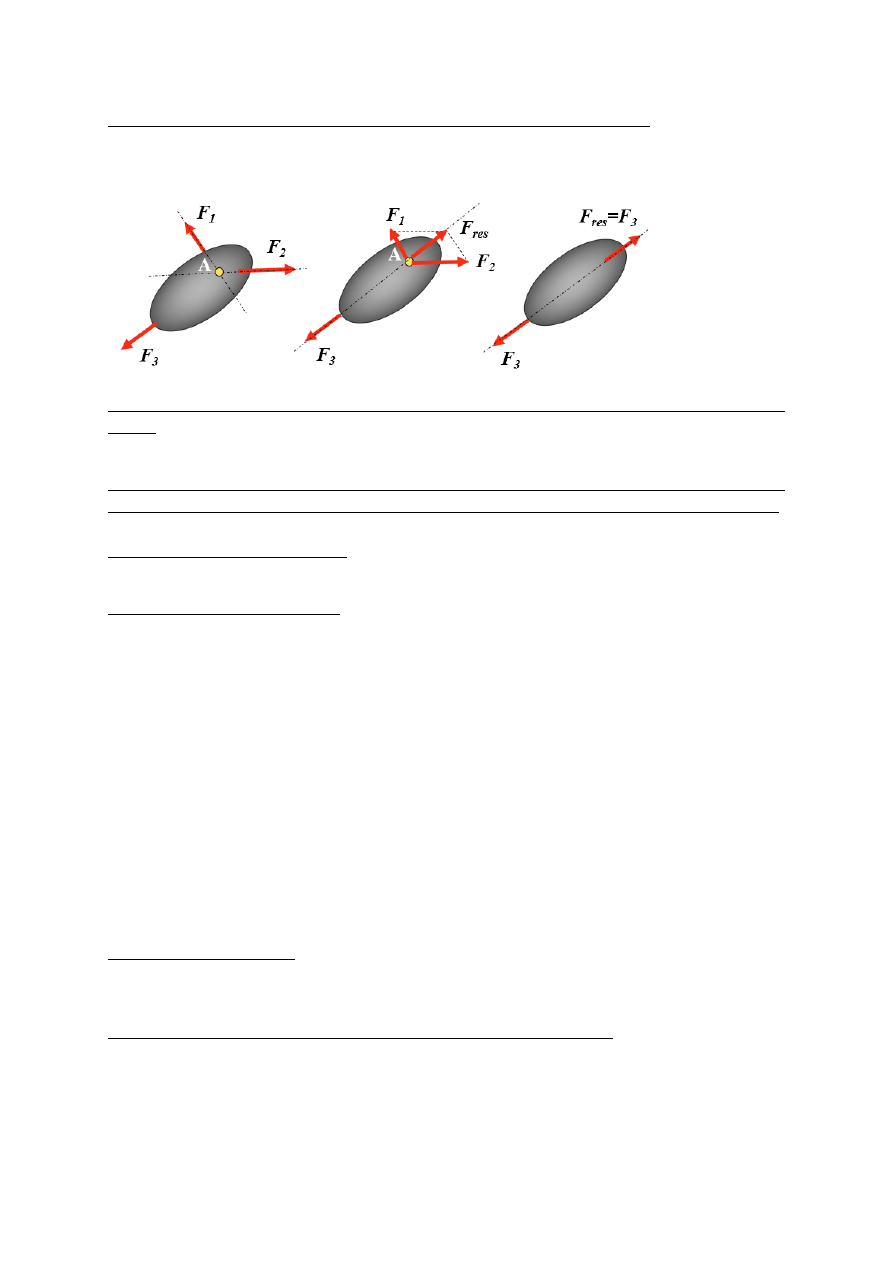
1. Defineeri ja selgita graafiliselt koonduv jõusüsteem- Koonduvaks nimetatakse
jõusüsteemi, mille jõudude mõjusirged lõikuvad ühes punktis
2. Esita koonduva jõusüsteemi tasakaalutingimus
vektorkujul Fres= 0
skalaarselt Fres,x= 0 ; Fres,y= 0 ; Fres,z= 0 ,
3. Esita tasandilise koonduva jõusüsteemi tasakaalutingimus vektorkujul ja skalaarselt.
S
Fx= 0 ; SFy= 0
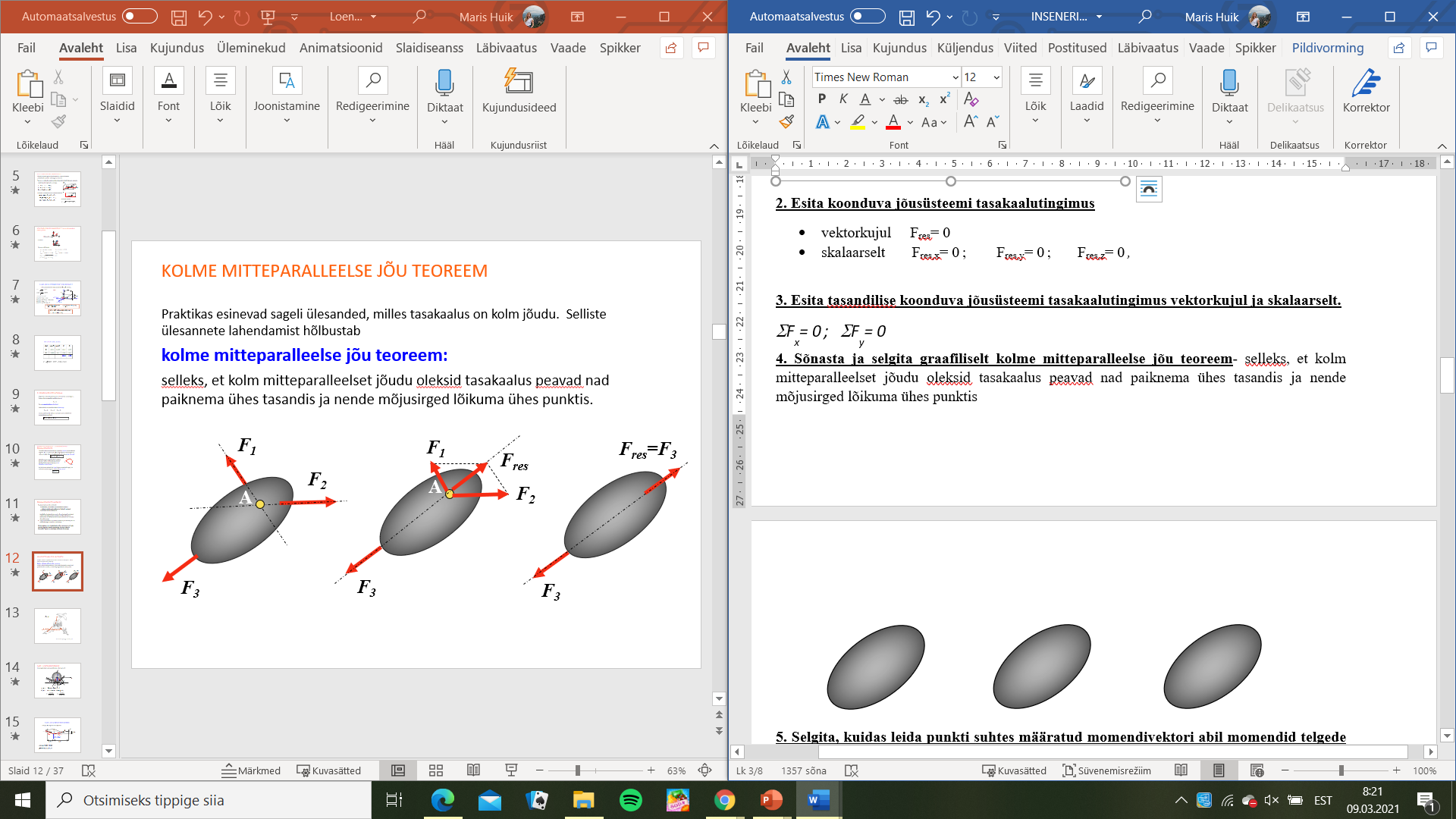
4. Sõnasta ja selgita graafiliselt kolme mitteparalleelse jõu teoreem- selleks, et kolm
mitteparalleelset jõudu oleksid tasakaalus peavad nad paiknema ühes tasandis ja nende
mõjusirged lõikuma ühes punktis
5. Selgita, kuidas leida punkti suhtes määratud momendivektori abil momendid telgede
suhtes- Jõu pöördevõime sõltub nii jõu suurusest F kui ka õlast h. Jõu pöördevõimet
iseloomustavat skalaarset korrutist Fh nimetatakse jõu momendiks telje suhtes
6. Arvuta moment, mille tekitavad kaks vastassuunalist paralleelset jõudu F1=-F2 ja
millede vahekaugus on h. Millise staatika põhielemendi selline jõusüsteem moodustab-
Kui kahe vastassuunalise paralleelse jõu puhul F1= -F2, siis jõusüsteemi resultant on null,
kuigi süsteem ei ole tasakaalus! Sellist jõusüsteemi nimetame jõupaariks. See on – staatika
põhielement, nagu jõudki
7. Kirjelda jõupaari omadusi.
Jäiga keha seisund ei muutu, kui asendada üks jõupaar teise samas tasandis mõjuva
samasuunalise jõupaariga, mille momendil on sama moodul
Jäiga keha seisund ei muutu, kui jõupaar üle kanda oma tasandist mistahes teise
paralleelsesse tasandisse
Jäigale kehale mõjuv jõupaaride süsteem on ekvivalentne ühe jõupaariga, mille
moment võrdub jõupaaride momentvektorite summaga.
Mres= SMi
Jõupaar on täielikult määratud oma momentvektoriga
TEEMA 3. SUVALISE JÕUSÜSTEEMI TAANDAMINE. PEAVEKTOR
JA -MOMENT
1. Selgita jõu rööplüket- Jäigale kehale rakendatud jõudu võib selle jõu mõju muutmata
paralleelselt üle kanda keha mis tahes teise punkti, kui lisada jõupaar, mille moment võrdub
ülekantava jõu momendiga uue rakenduspunkti suhtes
2. Sõnasta staatika põhiteoreem peavektorist ja peamomendist- iga jõusüsteemi saab
asendada ekvivalentse süsteemiga, mis koosneb taandamiskeskmes rakendatud peavektorist
ja jõupaarist, mille moment võrdub peamomendiga
Peavektor
i
i
F
F
0
Peamoment
i
i
i
i
i
h
F
F
M
M
0
3. Sõnasta ja selgita graafiliselt Varignioni teoreem- Kui jõusüsteemil on resultant, siis
võrdub resultandi moment mis tahes punkti suhtes süsteemi jõudude sama punkti suhtes
leitud momentide geomeetrilise summaga
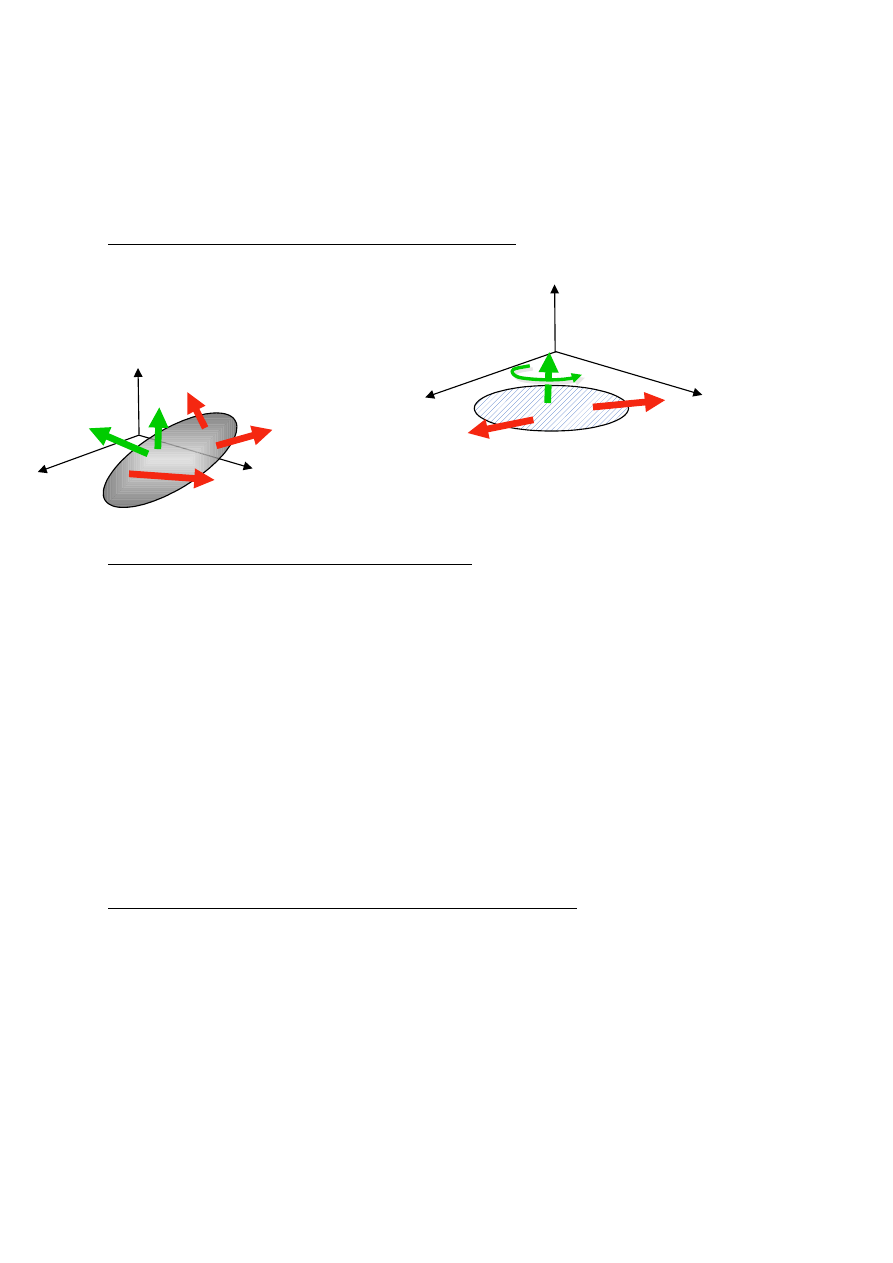
4. Selgita jõusüsteemi taandamise erijuhtumeid.
Jõusüsteem taandub jõupaariks. Jõuresultant puudub. Tulemus kehtib iga
taandamiskeskme korral FO=0; MO 0
Peavektor on jõusüsteemi resultandiks FO 0; MO = 0
Mõlemad vektorid on omavahel risti FO 0; MO 0
0
O
O
M
F
Mõlemad vektorid on paralleelsed FO 0; MO 0 (jõukruvi või dünaam)jõukruvi või dünaam))
0
O
O
M
F
Mõlemad vektorid paiknevad suvalise nurga all FO 0; MO 0
0
O
O
M
F
Peavektor ja peamoment on nullid -- süsteem on tasakaalus FO = 0; MO =0
TEEMA 4. RASKUSKESE. PINNAMOMENDID
1. Selgita, kuidas leitakse punktmasside süsteemi raskuskese-
1. Vaatleme raskusväljas paiknevat punktmasside mi (i=1,2, …) süsteemi, milles
masside omavahelised kaugused on fikseeritud
2. Näitame, et on olemas üks süsteemiga muutumatult seotud punkt, mida süsteemi
raskusjõu mõjusirge läbib süsteemi mis tahes pöörde korral – see ongi raskuskese
3. Tõestame, et selline punkt eksisteerib, ja leiame tema asukoha. Võtame kasutusele
raskusjõudude sihilise ühikvektori e. Siis süsteemi suvalises asendis.
e
G
G
e
G
G
i
i
,
x
y
F
1
Fr
es
M
1
M
2
F
2
O
F
3
x
z
F
1
Fr
es
M2
y
MO (Fres) = SMO (Fi)
My (Fres) = SMy
4. Varignoni teoreemi kohaselt: võrdub resultandi moment punkti O suhtes süsteemi
jõudude sama punkti suhtes leitud momentvektorite summaga.
3
0
2
0
1
e
r
G
r
G
e
G
r
e
G
r
G
r
G
r
i
i
i
k
i
i
i
k
i
i
i
k
Kuna võrrand (3) peab kehtima punktmasside süsteemi mistahes asendi korral, siis
0
i
i
i
k
r
G
r
G
5. Seega raskuskeskme kohavektor on:
G
r
G
r
i
i
i
k
Raskuskeskme koordinaadid on kohavektori projektsioonid:
,
,
,
V
zdV
z
V
ydV
y
V
xdV
V
g
xdV
g
x
V
C
V
C
V
V
C
6. Kui iga punktmassi vabalangemiskiirendus on sama, siis G=mg ja Gi=mig
m
z
m
z
m
y
m
y
m
x
m
x
i
i
i
C
i
i
i
C
i
i
i
C
,
,
Need on massikeskme koordinaadid. Tehnika rakendustes ühtlase raskusvälja puhul
raskuskese ühtib massikeskmega.
2. Selgita, kuidas leitakse pideva keha raskuskese- On olemas üks kehaga seotud punkt C,
mida keha raskusjõu mõjusirge läbib keha mis tahes pöörde korral. See punkt on keha
raskuskese. Ruumelementide ruumala dV piiramatul vähendamisel dV→0 tuleb summad
valemis (7) asendada integraalidega, kust peale gr taandamist leiame (G=mg=ρVgVg)
,
,
,
V
zdV
z
V
ydV
y
V
xdV
V
g
xdV
g
x
V
C
V
C
V
V
C
3. Defineeri staatiline moment ja esita arvutusvalem- *Pinnakeskme asukoha leidmiseks
arvutatakse iga pinnaelemendi raskusjõu moment telje z suhtes ja integreeritakse üle pinna.
*Arvutatavas integraalis on tähtis mitte ainult iga pinnaelemendi suurus, vaid ka tema
asukoht. *Pinnakeskme teise koordinaadi leidmiseks “pöörame” pinda koos
koodinaadistikuga p/2 võrra. *Uuritav integraal on oma loomult moment. Edaspidi me
nimetame seda STAATILISEKS MOMENDIKS.
Integraali nimetame kujundi A staatiliseks momendiks telje x suhtes.
integraali kujundi A staatiliseks momendiks telje y suhtes.
A
y
xdA
S
S
x=
A
ydA
staatilise momendi dimensiooniks on L3 (m3, cm3, mm3).
Staatiline moment telje suhtes võib olla nii positiivne kui ka negatiivne, kuna x ja y
võivad olla positiivsed ja negatiivsed. Staatiline moment võib olla ka võrdne nulliga.
Valemitega (4)
A
y
S
c
x
ja
A
x
S
c
y
võib arvutada kujundi
staatilise momendi telje suhtes, kui on teada kujundi raskuskeskme asukoht. Selleks
tuleb kujundi pindala korrutada raskuskeskme vastava koordinaadiga.
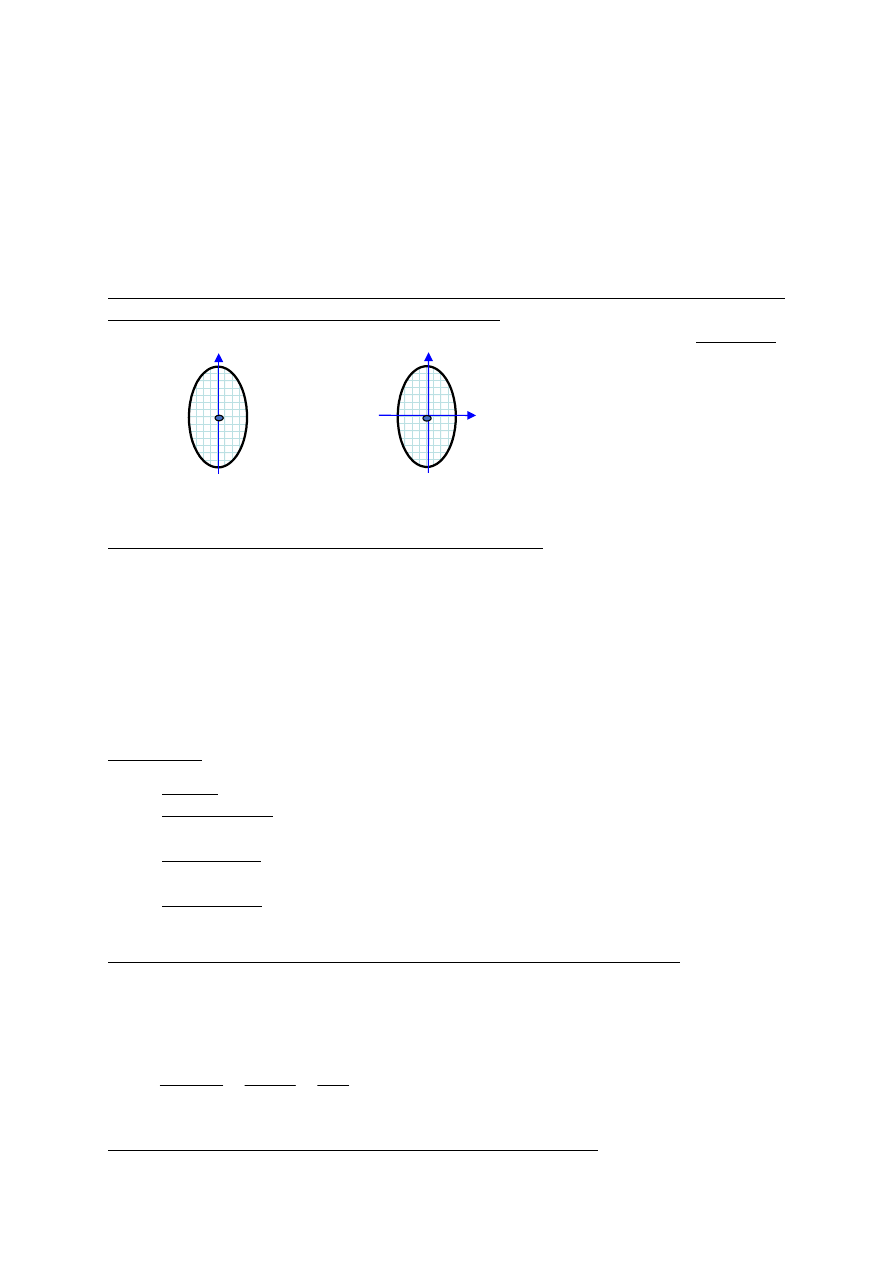
4. Defineeri keskteljed ja selgita, millist keha punkti kesktelg läbib ja milline on
staatilise momendi väärtus kesktelgede suhtes- Valemitest (4) on näha, et staatiline
moment telje suhtes on null siis kui telg läbib raskuskeset. Sellist telge nimetame keskteljeks.
5. Defineeri inertsimoment ja esita arvutusvalem- Telginertsimoment (edaspidi
inertsimoment) on pinnakarakteristik mis näitab kujundi pinnaelementide laotust mingi telje
suhtes. Kujundi inertsimoment x ja y telje suhtes väljendub integraalina.
.
,
2
2
A
y
A
x
dA
x
I
dA
y
I
TEEMA 5. JÕUVÄLJAD JA NENDE TAANDAMINE. JÕUSÜSTEEMI
TASAKAAL.
1. Defineeri
Jõuväli
- ruum, pind või joon, mille igas punktis on määratud lausjõu intensiivsus p.
Ruumjõuvälja
intensiivsus näitab punkti vahetus läheduses ühikmahule mõjuvat
jõudu, mõõtühikuga N/m3.
Pindjõuvälja
intensiivsus näitab punkti vahetus läheduses ühikpinnale mõjuvat
jõudu, mõõtühikuga N/m2 (kN/m2).
Joonjõuvälja
intensiivsus näitab punkti vahetus läheduses ühikpikkusele mõjuvat
jõudu, mõõtühikuga N/m.
2. Selgita, kuidas määratakse joonjõuvälja resultanti ja selle asukohta- joonjõuvälja
resultant võrdub koormusepüüri pindalaga, resultandi mõjusirge aga läbib koormusepüüri
raskuskeset. Resultandi mõjusirge asendi leiame valemist, kus Sz on pindala wpz staatiline
moment telje z suhtes. Saadud avaldis määrab kujundi wpz raskuskeskme koordinaadi.
,
,
pz
z
pz
z
res
l
z
res
S
xd
F
dx
xp
x
3. Esita jõusüsteemi tasakaalutingimus vektor- ja skalaarkujul.
y
y
C
C
x
S
x
=0, S
y
=0,
x,y - keskteljed
S
y
=0
y
-
Skalaarkujul
,
0
i
ix
Ox
F
F
,
0
i
i
iy
i
iz
Ox
z
F
y
F
M
,
0
i
iy
Oy
F
F
,
0
i
i
iz
i
ix
Oy
x
F
z
F
M
,
0
i
iz
Oz
F
F
.
0
i
i
ix
i
iy
Oz
y
F
x
F
M
4. Esita tasandilise jõusüsteemi jaoks piisavaid tasakaalutingimusi.
Jõusüsteem on tasakaalus, kui nulliga võrduvad kõigi jõudude projektsioonide
summad kahel koordinaatteljel ja kõigi jõudude momentide summa jõutasandi
suvalist punkti läbiva risttelje suhtes.
Jõusüsteem on tasakaalus, kui nulliga võrdub kõigi jõudude momentide summa kahe
suvalise punkti suhtes ja projektsioonide summa teljel, mis ei ole risti punkti läbiva
sirgega.
Jõusüsteem on tasakaalus, kui nulliga võrdub kõigi jõudude momentide summa kolme
punkti suhtes, mis ei asetse ühel sirgel.
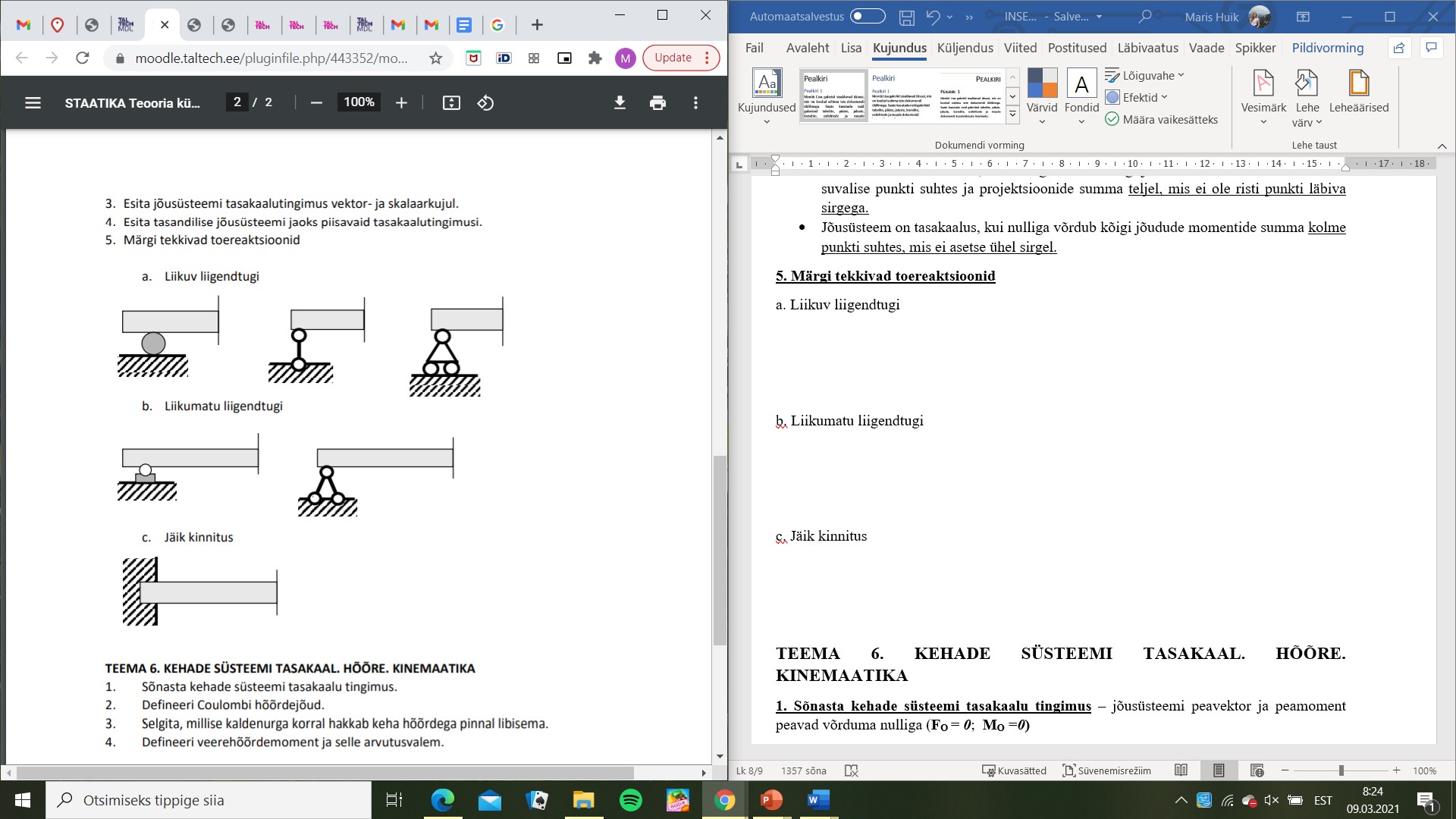
5. Märgi tekkivad toereaktsioonid
a. Liikuv liigendtugi
b. Liikumatu liigendtugi
c. Jäik kinnitus
TEEMA 6. KEHADE SÜSTEEMI TASAKAAL. HÕÕRE.
KINEMAATIKA
1. Sõnasta kehade süsteemi tasakaalu tingimus – jõusüsteemi peavektor ja peamoment
peavad võrduma nulliga (FO = 0; MO =0)
2. Defineeri Coulombi hõõrdejõud-
füüsikaseadus, mis ütleb, et
kaks punktlaengut q1 ja q2 mõjutavad teineteist jõuga Fe, mille moodul on võrdeline nende
laengute absoluutväärtuste korrutisega ja pöördvõrdeline nendevahelise kauguse ruuduga.
3. Selgita, millise kaldenurga korral hakkab keha hõõrdega pinnal libisema- Kaldenurga
f kasvades jõud Ft suureneb ja mFn väheneb ning keha hakkab libisema. Süsteem on
tasakaalus, kui Ft . Keha hakkab libisema, kui tan(f)>m.
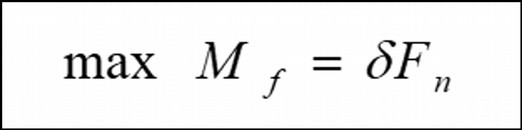
4. Defineeri veerehõõrdemoment ja selle arvutusvalem- Veerehõõremomendi Mf
moodustab jõupaar Fn , FG , mille moment on Mf=Fnh. Piirtasakaalu asendis Mf=FR. Kui
Mfsiis keha hakkab veerema.
INSENERIFÜÜSIKA/INSENERIMEHAANIKA TEOREETILISE OSA KORDAMISKÜSIMUSED I
Sarnased õppematerjalid
![Rakendusmehaanika konspekt]()
2
docx
Rakendusmehaanika konspekt
Rakendusmehaanika
Kordamisküsimused
1. Jõusüsteem: · Mitu ühele ja samale kehale mõjuvat jõudu moodustavad jõusüsteemi
· Kui üht jõusüsteemi saab asendada teisega, ilma et keha seisund (liikumine või paigalseis) muutuks, siis
selliseid jõusüsteeme nimetatakse ekvivalentseteks.
· Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu
nimetatakse süsteemi resultandiks.
2. Tasakaaluaksioom: Tasakaaluaksioom. Kaks absoluutselt jäigale kehale
rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised.
3. Superpositsiooniaksioom
Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Ei
kehti deformeeruva keha juhul (miks?). Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki
mõjusirget üle keha mistahes teise punkti.
4. Jõurööpküliku aksioom: Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha
seisundit muutmata asend
![Mehaanika eksam-]()
11
docx
Mehaanika eksam
Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks.
1. Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on
samal sirgel ja võrdvastupidised
2. Superpositsiooniaksioom. Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha
tasakaalu või liikumist. Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha
mistahes teise punkti.
3. Jõurööpküliku aksioom. . Kui keha mingis punktis on rakendatud kaks jõudu, siis neid
saab keha seisundit muutmata asendada resultandiga, mis võrdub nende geomeetrilise summaga. Aksioom kehtib ka
deformeeruva keha juhul.
4. Mõju ja vastumõju aksioom (Newtoni III seadus ). Kaks keha mõjutavad teineteist võrdvastupidiste jõududega,
millel on ühine mõjusirge.
5. Jäigastamise aksioom. . Deformeeruva keha tasakaal ei muutu, kui lugeda
![Kt-materjal 2]()
3
doc
Kt. materjal 2
Koonduv jõusüsteem,
Koonduvaks nimetatakse jõusüsteemi, mille jõudude mõjusirged lõikuvad ühes punktis.
Ülesannete lahendamiseks tuleb süsteem taandad lihtsamale kujule ja leida
tasakaalutingimused.
Taandamise aluseks on teoreem: koonduv jõusüsteem on ekvivalentne resultandiga, mis
läbib jõudude mõjusirgete lõikepunkti.
Superpositsiooniaksioomi järeldusena võib jõusüsteemis olevad jõud üle kanda nenede
mõjusirgete lõikepunkti ja seejärel jõurööpküliku abil asendada nendega ekvivalentse
resultandiga Fres.
Võib ka joonestada jõukolmnurga (joon2), kus liidetavad jõud kujutatakse teineteise järel,
resultant on suunatud esimese vektori algusest teise lõppu.
Üldjuhul koosneb koonduv jõusüsteem rohkematest jõududest. Need võib üle kanda
mõjusirgete lõikepunkti ja järjekorras liita jõukolmnurkade abil. Resultant on suunatud
esimese jõu
algusest viimase lõppu.(joon3).
Tasandilise jõusüsteemi korral on resultanti võimalik leida graafiliselt, kujut
![Tehniline mehaanika I]()
3
docx
Tehniline mehaanika I
Jõud- suurus, mis on kehade vastastikuse mõju mõõduks. Tähis F, ühik njuuton N. Kirjeldamiseks on vaja
anda tema rakenduspunkt, suund ,moodul . Rakenduspunkt ja suund koos määravad jõu mõjusirge.
Ekvivalentsed ehk samaväärsed on need jõud, millel on sama rakenduspunkt, suund ja moodul.
Jõusüsteemi moodustavad mitu ühele ja samale kehale rakendatavat jõudu. Kui üht jõusüsteemi saab
asendada teisega, ilma et keha seisund muutuks, siis on tegemist ekvivalentse jõusüsteemiga. Kui
jõusüsteemiga on ekvivalentne ainult üks jõud , siis nimetatakse seda jõudu resultandiks Fres, mida on
võimalik leida näiteks rööpkülikuaksioomi korduval kasutamisel..
Tasakaalu all mõistetakse mehaanikas keha paigalseisu teiste kehade suhtes.
Staatika- mehaanika haru , mis uurib jõusüsteemide omadusi ja nende tasakaalu. Põhiülesanneteks on
jõusüsteemi taandamine ja jõusüsteemi tasakaalutingimustega.
Jäiga keha mudel- vaatleme keha justkui deformatsiooni ei esineks. Jäika
![Eksamiküsimuste staatika-vastused]()
9
doc
Eksamiküsimuste(staatika) vastused
Staatika
1. Mida nimetatakse jõuks?
jõud on - vektoriaalne suurus, mis väljendab ühe materjaalse keha mehaanikalist toimet teisele kehale
ja mille tulemuseks on kehade liikumise muutus või kehaosakeste vastastikuse asendi
muutus(deformatsioon).
2. Mis on jõu mõjusirge?
jõu mõjusirge on sirge, millel asub jõud.
3. Mida nimetatakse absoluutselt jäigaks kehaks?
absoluutselt jäigaks kehaks nim. sellist keha, mille, mis tahes kahe punkti kaugus jääb alati
muutumatuks.
4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks?
Kui ühe jõusüsteemi saab asendada teise jõusüsteemiga ilma keha liikumist või paigalseisumuutmata,
siis need jõusüsteemid on ekvivalentsed.
Nt. ( F 1, F 2, ... , F n) ( P 1, P 2, ..., P k)
5. Millist jõusüsteemi võib nimetada tasakaalus olevaks jõusüsteemiks?
tasakaalus (o
![Insenerimehaanika eksami küsimuste vastused]()
9
docx
Insenerimehaanika eksami küsimuste vastused
1. Teoreetilise mehaanika aine. Teoreetilise mehaanika osad (staatika, kinemaatika,
dünaamika, analüütiline mehaanika). Insenerimehaanika.
*Mehaanika on teadus reaalsete objektide liikumisest.
* Teoreetiline mehaanika on mehaanika osa, mis uurib absoluutselt jäikade kehade paigalseisu
ja liikumist nendele kehale rakendatud jõudude mõjul. Absoluutselt jäigaks kehaks nimetame
keha, mille kahe mistahes punkti vaheline kaugus on jääv sõltumatult kehale toimivatest
välismõjutustest (jõududest). *Seega: absoluutselt jäigas kehas ei toimu iialgi mitte
mingisuguseid deformatsioone. On aga selge, et absoluutselt jäiga keha mõiste on
abstraktsioon, sest kõik reaalsed kehad tegelikult ikkagi deformeeruvad välisjõudude mõjul.
Igapäevases praktikas me aga näeme, et rakendatud jõudude toimel on need deformatsioonid
üldiselt väga väikesed ja paljudes ülesannetes võib nad esimeses lähenduses jätta
arvestamata. See asjaolu õigustabki jäiga keha kasutamist teoreetilises m
![Eksamiküsimused]()
22
doc
Eksamiküsimused
Eksamiküsimused
Staatika, kinemaatika ja dünaamika
1. Mida nimetatakse jõuks?
Jõud on vektoriaalne suurus, mis väljendab ühe materiaalse keha mehaanikalist toimet teisele kehale ja
mille tulemuseks on kas kehade liikumise muutus või keha osakeste vastastikuse asendi muutus
(deformatsioon).
2. Mis on jõu mõjusirge?
Sirget, mida mööda on jõud suunatud, nim jõu mõjusirgeks.
Jõu mõjusirge saadakse jõuvektori sirge pikendamisel mõlemale poole.
3. Mida nimetatakse absoluutselt jäigaks kehaks?
Absoluutselt jäigaks kehaks nim sellist keha, mille mistahes kahe punkti vaheline kaugus jääb alati
muutumatuks.
4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks?
Kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või tasakaalus mitte midagi ei muutu,
siis neid jõusüsteeme nim ekvivalentseteks.
5. Millal võib kahte jõusüsteemi nimetada ekvival
![Staatika-kinemaatika ja dünaamika]()
22
doc
Staatika, kinemaatika ja dünaamika
Eksamiküsimused
Staatika, kinemaatika ja dünaamika
1. Mida nimetatakse jõuks?
Jõud on vektoriaalne suurus, mis väljendab ühe materiaalse keha mehaanikalist toimet teisele kehale ja
mille tulemuseks on kas kehade liikumise muutus või keha osakeste vastastikuse asendi muutus
(deformatsioon).
2. Mis on jõu mõjusirge?
Sirget, mida mööda on jõud suunatud, nim jõu mõjusirgeks.
Jõu mõjusirge saadakse jõuvektori sirge pikendamisel mõlemale poole.
3. Mida nimetatakse absoluutselt jäigaks kehaks?
Absoluutselt jäigaks kehaks nim sellist keha, mille mistahes kahe punkti vaheline kaugus jääb alati
muutumatuks.
4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks?
Kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või tasakaalus mitte midagi ei muutu,
siis neid jõusüsteeme nim ekvivalentseteks.
5. Millal võib kahte jõusüsteemi nimetada ekvival
Meedia
Kommentaarid (0)






























Kõik kommentaarid