Rootorid
Eesti
Lennuakadeemia Kopteri lennudünaamika •
Kopter on õhust raskem õhusõiduk millel
tõstejõu ja tõmbejõu tekitamiseks
kasutatakse tõstepropellerit (rootorit) mille
abil ta saab tekitada tõstejõudu, seista
paigal maapinnakohal ja
liikuda piloodile
vajalikus suunas.
Bell 260
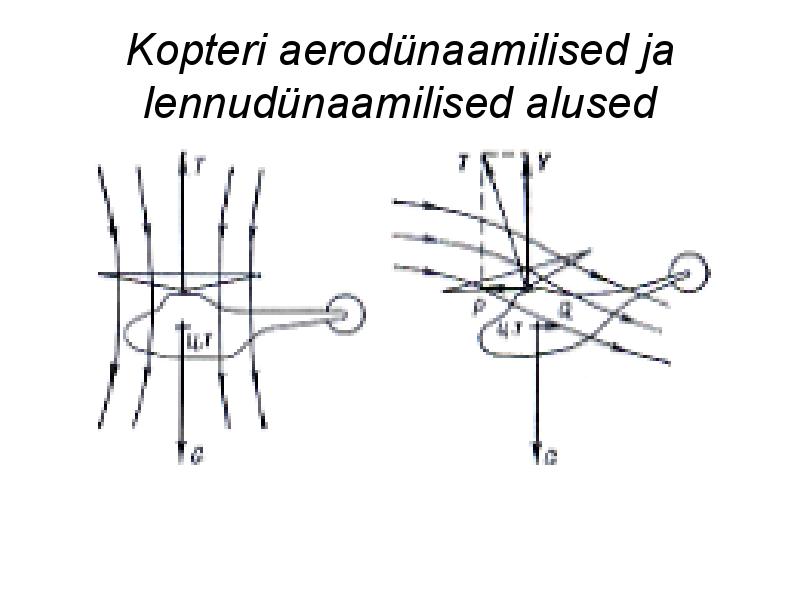
Kopteri aerodünaamilised ja lennudünaamilised alused• Kopteri rootori ülesandeks on tekitada
aerodünaamilist tõstejõudu ja tõmbejõudu.
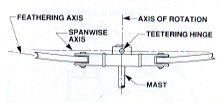
• Kui tõstepropeller asetseb oma
teljega pikki õhusõiduki
Y1 telge ja puudub tema
liikumine
X1 ; Z1 ; telgede suunas siis
aerodünaamiline jõud
T on suunatud pikki
Y1 telge.
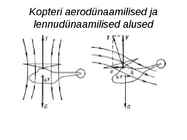
Kopteri aerodünaamilised ja lennudünaamilised alused• Kui õhuvoog on suunatud rootorile mingi nurga
all siis aerodünaamiline jõud
T moodustab
Y1 teljega mingi nurga.
• Aerodünaamilise jõu
T moodustaja
Y oleks si s
tõstejõud ja on suunatud perpendikulaarselt
li kumise ki
ruse vektoriga.
• Teine
T moodustaja
P oleks sellele juhul
tõmbejõu
vektor ja suunatud helikopteri lennu
suunas ning
ekvivalentne lennuki tõmbejõuga.
• Takistusjõud
Q tekitatakse helikopteri
kere takistusega, telikute takistusega, ja tagumise
propelleri takistusega
Rootori arvestatava
ketta pindala
Kopteri aerodünaamilised ja lennudünaamilised alusedRootori
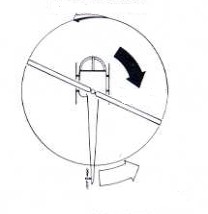
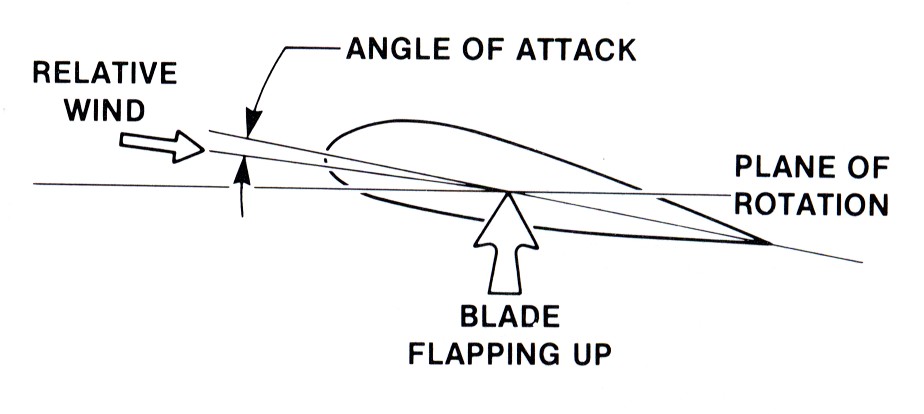
labade viibutusliigutused
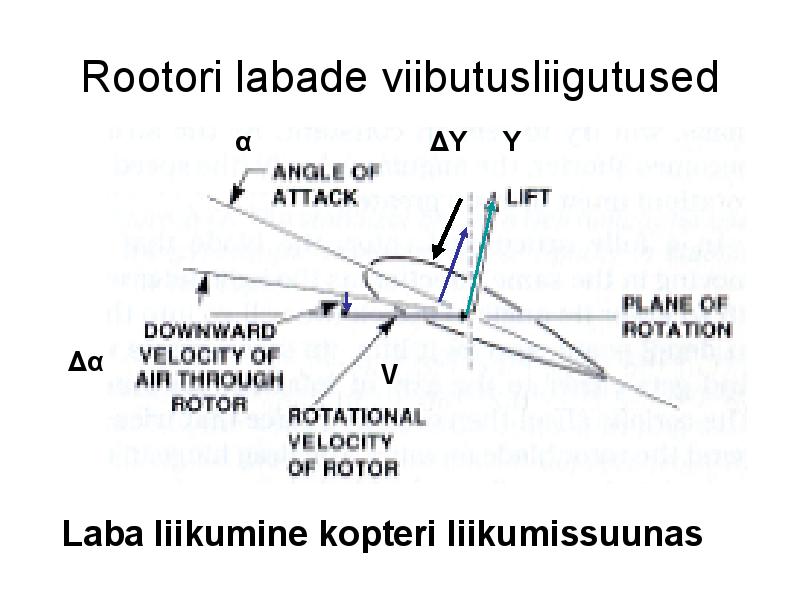
• Toimuvad labade li kumisel ümber horisontaalse
kinnitussõlme õhuvoo li kumisel tõstepropellerile.
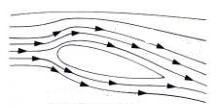
• Labal , mis liigub õhuvoo
kiirusele vastu,
suureneb profiili pinnal õhuvoo ki rus ja selle
tulemusena suureneb ka tõstejõu
muutuja vektor ehk rootori
laba profi li tõstejõud.
• Rootori laba jäikus ei ole ühesugune kogu tema
ulatuses ja ka tõstejõud on erinev laba pikkuse
ulatuses.
• Rootori laba paindub ülespoole ja selle
tulemusena kohtumisnurk väheneb ja väheneb
ka tõstejõud.
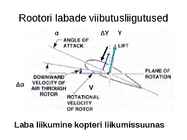
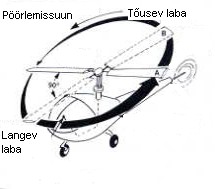
Rootori labade viibutusliigutused
α ΔY Y
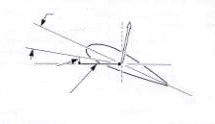
ΔαVLaba liikumine kopteri liikumissuunasRootori labade viibutusliigutused
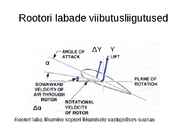
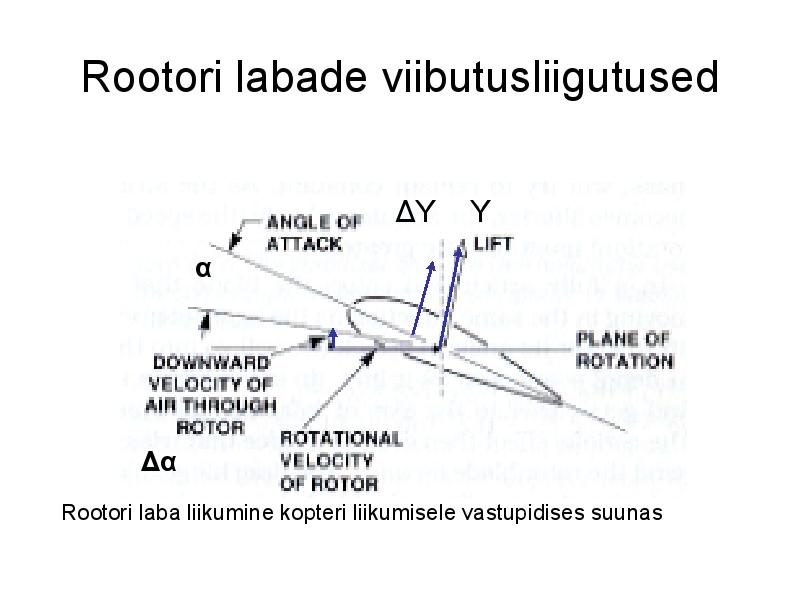
ΔY Y
αΔαRootori laba li kumine kopteri liikumisele vastupidises suunas
Rootori labade viibutusliigutused
∀ ∆α – laba kohtumisnurga muutus; V – kopteri li kumise
kiirus
• Labal , mis li gub tagasi ehk õhuvoo suunas õhuvoo
li kumiskiirus väheneb.
• Sel e tulemusel profi lil tõstejõuvektori suurus väheneb.
Laba li gub al apoole ja tema kohtumisnurk suureneb.
• Mida suurem on lennukiirus seda suurem on ka
kohtumisnurkade erinevus. Teatud lennukiirusel tekib
al alangeval labal turbulentne õhuvoog, mis on
takistuseks edasise ki ruse suurendamisel.
• Mõnedel helikopterite tüüpidel kasutatakse tehnilise
lahendusena väikest ti ba, mis kinnitub kerele.
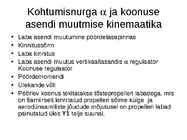
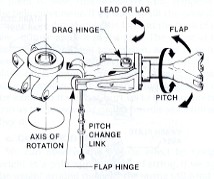
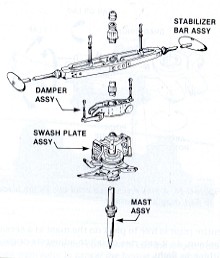
. Kohtumisnurga α ja
koonuse asendi muutmise
kinemaatika Laba asendi muutumine pöördetasapinnas
Kinnitussõrm
Laba
kinnitus Laba asendi
Pöördemomendi
muutus vertikaaltasandis
Ülekande võll
α
regulaator Koonuse regulaator
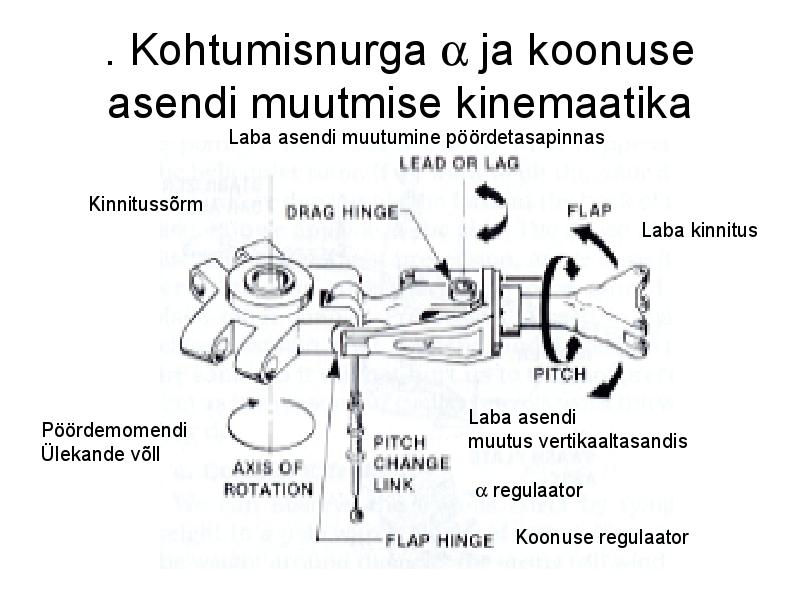
Kohtumisnurga α ja koonuse
asendi muutmise kinemaatika
• Laba asendi muutumine pöördetasapinnas
• Kinnitussõrm
• Laba kinnitus
• Laba asendi muutus vertikaaltasandis α regulaator
Koonuse regulaator
• Pöördemomendi
• Ülekande võl
• Pöörlev koonus tekitatakse tõstepropel eri
labadega , mis
on šarni rselt kinnitatud propel eri sõlme külge ja
aerodünaamiliste jõudude mõjutusel on propel eri
labad painutatud üles
Y1 telje suunal.
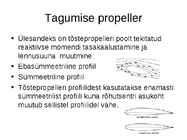
Tagumise
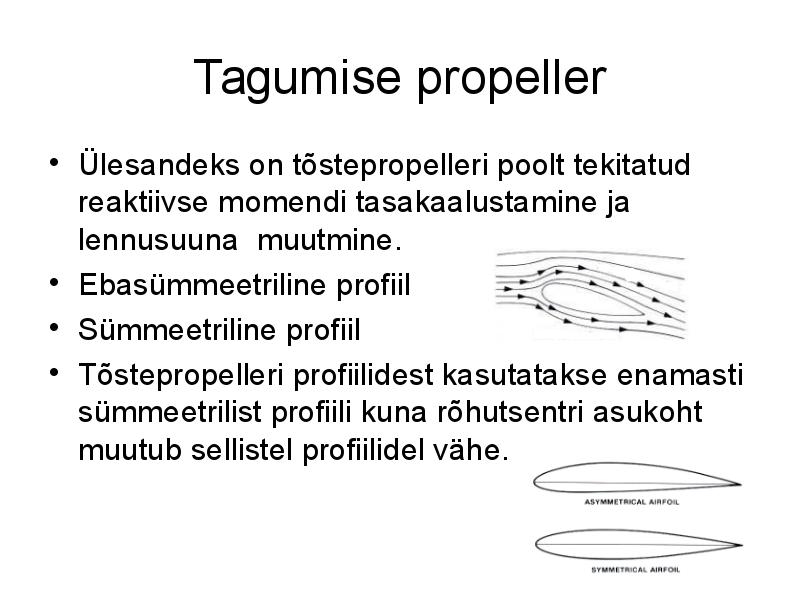
propeller • Ülesandeks on tõstepropelleri poolt tekitatud
reakti vse momendi
tasakaalustamine ja
lennusuuna muutmine.
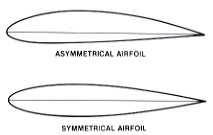
• Ebasümmeetriline profi l
• Sümmeetriline profiil
• Tõstepropelleri profi lidest kasutatakse enamasti
sümmeetrilist profiili kuna rõhutsentri asukoht
muutub sellistel profi lidel vähe.
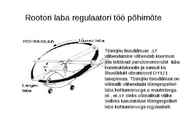
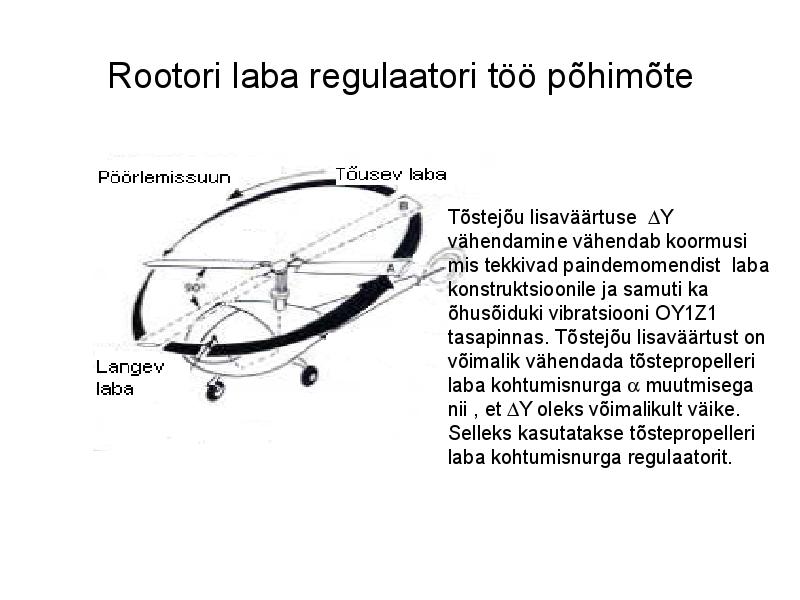
Rootori laba regulaatori töö põhimõte
Tõstejõu lisaväärtuse ∆Y
vähendamine vähendab koormusi
mis
tekkivad paindemomendist laba
konstruktsioonile ja samuti ka
õhusõiduki vibratsiooni OY1Z1
tasapinnas. Tõstejõu lisaväärtust on
võimalik vähendada tõstepropelleri
laba kohtumisnurga α muutmisega
nii , et ∆Y oleks võimalikult väike.
Selleks kasutatakse tõstepropelleri
laba kohtumisnurga regulaatorit.
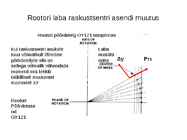
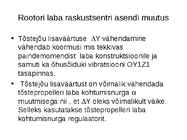
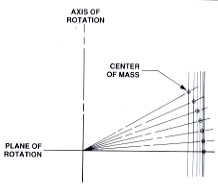
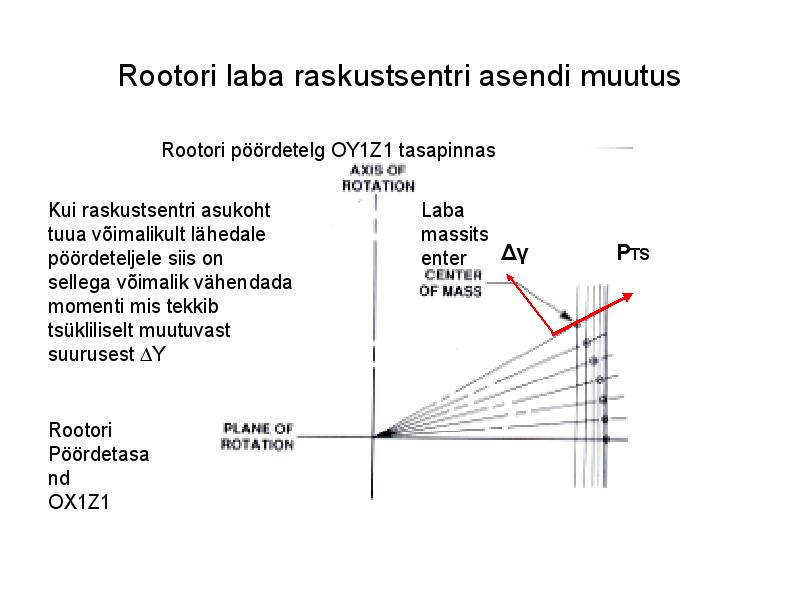
Rootori laba raskustsentri asendi muutus
Rootori pöördetelg OY1Z1 tasapinnas
Kui raskustsentri asukoht
Laba
tuua võimalikult lähedale
massits
pöördeteljele siis on
enter
Δγ PTSsellega võimalik vähendada
momenti mis
tekkib tsükliliselt muutuvast
suurusest ∆Y
Rootori
Pöördetasa
nd
OX1Z1
Rootori laba raskustsentri asendi muutus
• Tõstejõu lisaväärtuse ∆Y vähendamine
vähendab koormusi mis tekkivas
paindemomendist laba konstruktsioonile ja
samuti ka õhusõiduki vibratsiooni OY1Z1
tasapinnas.
• Tõstejõu lisaväärtust on võimalik vähendada
tõstepropelleri laba kohtumisnurga α
muutmisega nii , et ∆Y oleks võimalikult väike.
Selleks kasutatakse tõstepropelleri laba
kohtumisnurga regulaatorit.
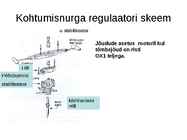
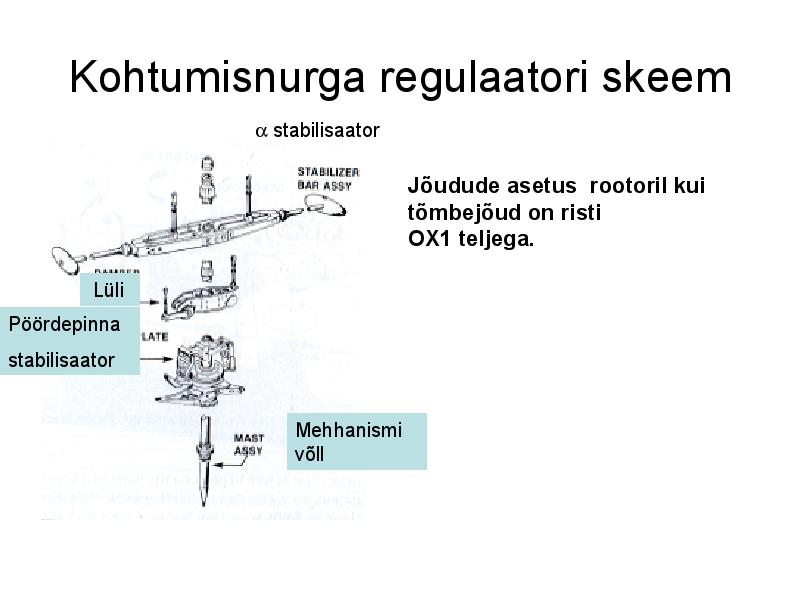
Kohtumisnurga regulaatori skeem
α
stabilisaator Jõudude asetus rootoril kui
tõmbejõud on risti
OX1 teljega. Lüli
Pöördepinna
stabilisaator
Mehhanismi
võll
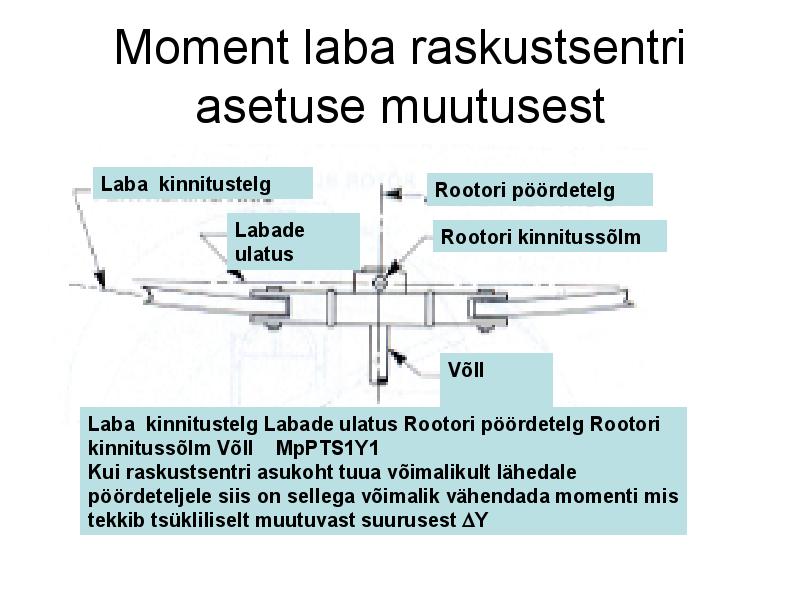
Moment laba raskustsentri
asetuse muutusest
Laba kinnitustelgRootori pöördetelgLabade Rootori kinnitussõlmulatusVõllLaba kinnitustelg Labade ulatus Rootori pöördetelg Rootori
kinnitussõlm Võll MpPTS1Y1
Kui raskustsentri asukoht tuua võimalikult lähedale
pöördeteljele siis on sellega võimalik vähendada momenti mis
tekkib tsükliliselt muutuvast suurusest ∆
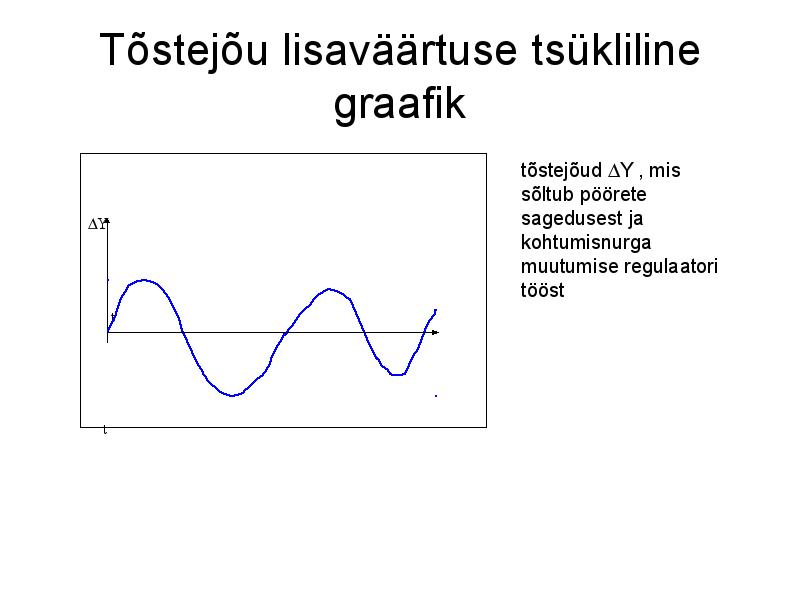
YTõstejõu lisaväärtuse tsükliline
graafik tõstejõud ∆Y , mis
sõltub pöörete
∆Y
sagedusest ja
kohtumisnurga
muutumise regulaatori
tööst
t
t
Kopteri lennutingimused. • Kui kopteri tõstepropel eri poolt tekitatud tõmbejõud
T võrdsustub tema kaaluga hakkab kopter hõljuma.
• Tõstepropel eri tõmbejõu suuna ja suuruse muutmiseks.
toimitakse järgmiselt:
• Tõmbejõu
T suuruse muutmiseks muudetakse jõual ika
võimsust ja sel ega tõstepropel eri sammu.
• See tähendab, et toimitakse ni nagu lennuki propel eri
korral säilitades pööretesageduse antud propel eri
konstruktsioonile optimaalses vahemikus, muutes ainult
jõual ika võimsust ja tõstepropel eri sammu
(kohtumisnurka).
• Tõmbejõu
T. suuna muutmiseks (sel eks et helikopter
li guks lendurile vajalikus suunas) muudetakse koonuse
kalde suunda.
Kopteri lennutingimused.•
Pöörlevat rootorit võib vaadelda. kui pöörlevat ketast mis omab oma massi.
Kui me muudame sellise koonuselise ketta asetust ruumis siis tekkib
hüroskoopiline moment nii nagu lennuki propellerigi korral ja see kantakse
üle rootorit kinnituskohtadele, kopteri kerele. Jõud mis kerele kantakse on
ebasümmeetrilised. Selliseid jõude püütakse konstruktsioonis kas vältida või
muuta nad võimalikult väikesteks.
•
Jõud muudavad ka rootori pöörlevate labade asetust.
•
Labad omavad massi ja laba asendi muutumisel muutub selle massi asetus
ruumis.
•
Esiteks toimub see teatud inertsusega ja kui massi asetust ruumis on juba
kord muudetud siis ta ei peatu mitte selles kohas kus me seda soovime
vaid liigub inertsjõudude tõttu edasi.
Tekkib võnkumine ümber uue asendi. Rootori laba aga pöörleb samal ajal
ümber oma telje ja selle tõttu tekkib täiendav kohtumisnurga muutumine,
täiendav ∆YG mõjul.
•
Selle vähendamiseks minimaalse suuruseni kasutatakse samu võtteid ja ka
sama regulaatorit.
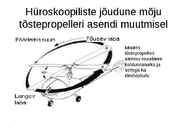
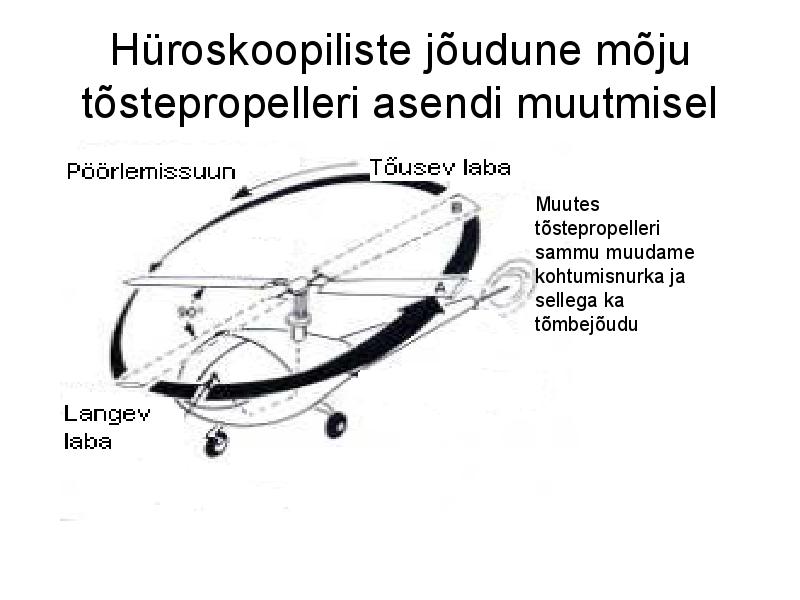
Hüroskoopiliste jõudune mõju
tõstepropelleri asendi muutmisel
Muutes
tõstepropelleri
sammu muudame
kohtumisnurka ja
sellega ka
tõmbejõudu
Kopteri liikumissuuna muutmine
• Rootori omapöörete sagedus tähendaks tema kindlat
pööretesagedust mil e tekitab temale suunatus õhuvoog.
• Tõmbejõud T, mis sel e juures tekib on enamvähem
võrdne ketta takistusega.
• Pöördemoment jõual ikalt kantakse rootorile ja sel e
tulemusel tekkiv moment rootori kinnitussõlmedes
püüab kopteri keret panna samuti pöörlema.
• Tõmbejõud, mis tekitatakse kopteri
sabas asuva
propel eriga kompenseerib kopteri jõual ika poolt
tekitatud ja kerele ülekantus momendi ja hoiab kopteri
piloodi poolt valitud lennusuunal.
• Muutes sabapropel eri sammu muudame me propel eri
tõmbejõudu ja sel ega ka kopteri li kumissuunda.
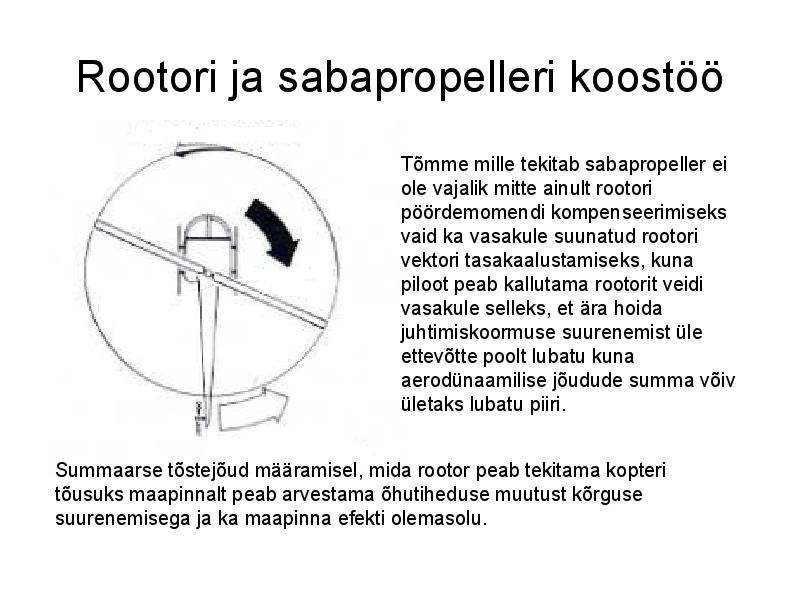
Rootori ja sabapropelleri koostöö
Tõmme mille tekitab sabapropeller ei
ole vajalik mitte ainult rootori
pöördemomendi kompenseerimiseks
vaid ka vasakule suunatud rootori
vektori tasakaalustamiseks, kuna
piloot peab kallutama rootorit veidi
vasakule selleks, et ära hoida
juhtimiskoormuse
suurenemist üle
ettevõtte poolt
lubatu kuna
aerodünaamilise jõudude summa võiv
ületaks lubatu piiri.
Summaarse tõstejõud määramisel, mida
rootor peab tekitama kopteri
tõusuks maapinnalt peab arvestama õhutiheduse muutust kõrguse
suurenemisega ja ka maapinna efekti olemasolu.
Õhutiheduse muutumise mõju
• Kahe rootori ja jõual ika
funktsioneerimine sõltub
õhutihedusest.
• Õhutiheduse muutus muudab rootorile kantava energia
hulka.
• Tõstejõu tekitamise juures omab tõstejõukoefitsient CY
ja keskkonna dünaamiline koormus määravat tähtsust.
• Dünaamilise koormuse tekkimisel on üks osa
õhutihedusel ja teine tõstepropel eri labasid läbiva
õhuvoo kiiruse ruudul. Y = CY ρ S.
• Õhutihedus omab suurt mõju kopteri funktsioneerimisel
ja piloot peab teadma mil ine on koormus standardses ja
mil ine reaalses kõrguses.
• Sel eks, et kopter ei puruneks peab piloot arvestama
õhutiheduse muutusega kõrguses ja sel ega muutuvat
dünaamilist koormust kopterile .
Kopteri hõljumine
• Kopteri hõljumisel maapinna kohal tuleks
vaadelda kahte varianti:
• Kõrgus millal kopter oma normaalse kaaluga on
mõjutatud maapinnaefektist;
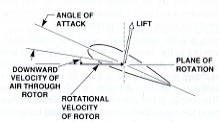
∀ αY Laba liikumise tasand
• Tõstepropellerit läbiva õhuvoo kiirusV1
• Rootori pöörlemise ki rus V
• Kõrgus millal kopter oma normaalse kaaluga
enam ei ole mõjutatud maapinna efektist;
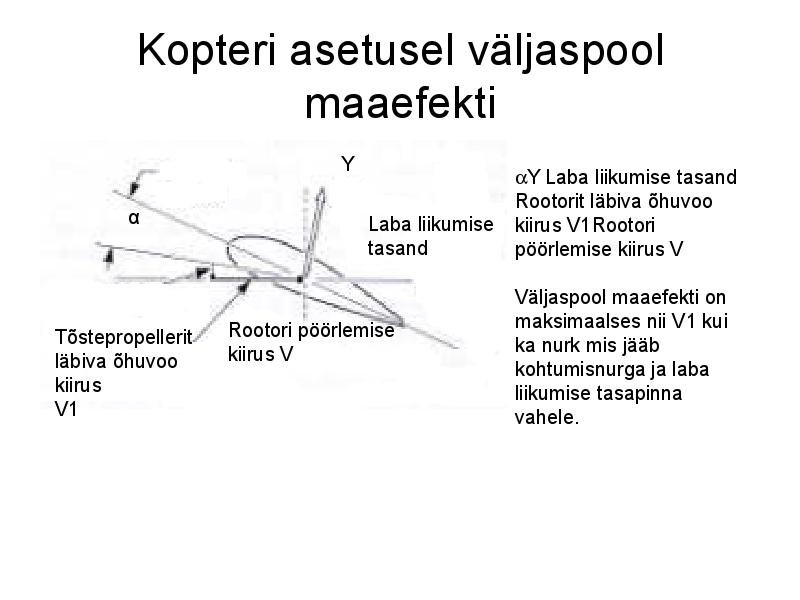
Kopteri asetusel väljaspool
maaefekti
Y
αY Laba liikumise tasand
Rootorit läbiva õhuvoo
Laba liikumise kiirus V1Rootori
tasand
pöörlemise kiirus V
Väljaspool maaefekti on
Rootori pöörlemise
maksimaalses nii V1 kui
Tõstepropellerit
kiirus V
ka nurk mis jääb
läbiva õhuvoo
kohtumisnurga ja laba
kiirus
liikumise tasapinna
V1
vahele.
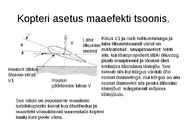
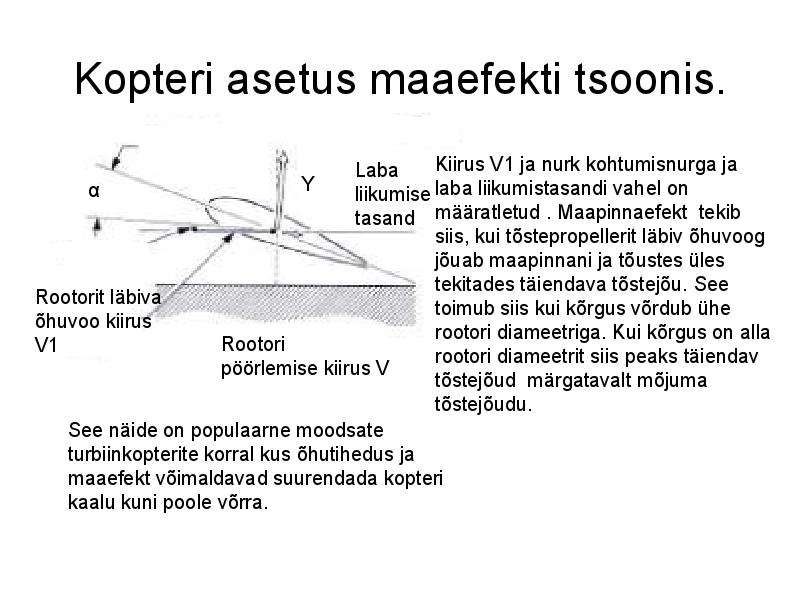
Kopteri asetus maaefekti tsoonis.
Laba
Kiirus V1 ja nurk kohtumisnurga ja
Y
liikumise laba liikumistasandi vahel on
tasand määratletud . Maapinnaefekt tekib
siis, kui tõstepropellerit läbiv õhuvoog
jõuab maapinnani ja tõustes üles
tekitades täiendava tõstejõu. See
Rootorit läbiva
toimub siis kui kõrgus võrdub ühe
õhuvoo kiirus
rootori diameetriga. Kui kõrgus on alla
V1
Rootori
rootori diameetrit siis peaks täiendav
pöörlemise kiirus V
tõstejõud märgatavalt mõjuma
tõstejõudu.
See näide on
populaarne moodsate
turbiinkopterite korral kus õhutihedus ja
maaefekt võimaldavad suurendada kopteri
kaalu kuni poole võrra.
Maapinnaefekt
• Maapinnaefekt, nagu võika arvata, ei ole aluseks, mil e
kaudu võika pehmendada al asuunatud jäika al a
helikiitusega ki kuvat õhuvoogu.
• Õhuvoog surutakse vastu maad ja sel isel madalal
kõrgusel tõstejõud omab väikest mi nus komponenti.
Järelikult rootori labade kohtumisnurk väheneb.
• See ei ole ainult summaarse kohtumisnurga
vähenemine, kuna sel el ajal tõstejõu vektor veidi kõrval
OY1
teljest ja kasulik võimsus mis kantakse
• rootorile on sama sel e tõttu on võimalik suurendada
kasuliku kaalu peaks kopter tõusma kõrgemale.
Kopteri vertikaalne tõus ja langus• Üheks nõudmiseks kopteri hõljumisel maakohal
on tõstejõu ja kaalu võrdsus.
• Kui piloot soovib tõusta vertikaalselt peab ta
suurendama rootori kõikide labade
kohtumisnurka ja samal ajal suurendama
jõuallika võimsust.
• Sellega kasvab jõuallika poolt ülekantav
pöördemoment ja piloot peab vajutama
pedaalile selleks, et muuta sabapropelleri
(rootori) tõmmet, sest kopter hakkab pöörlema
ümber OY1 telje.
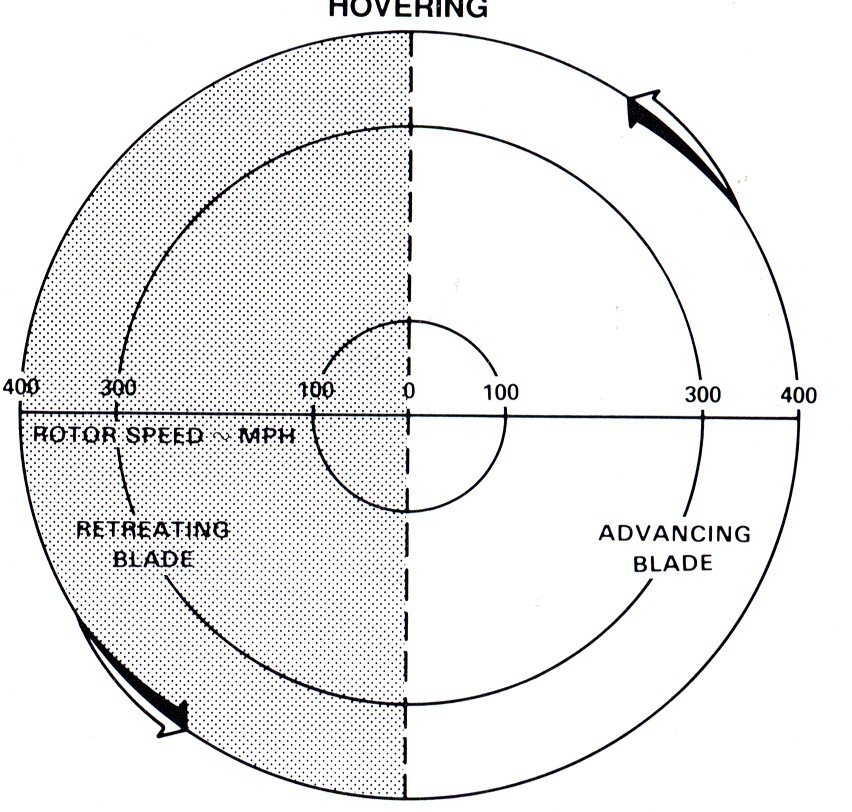
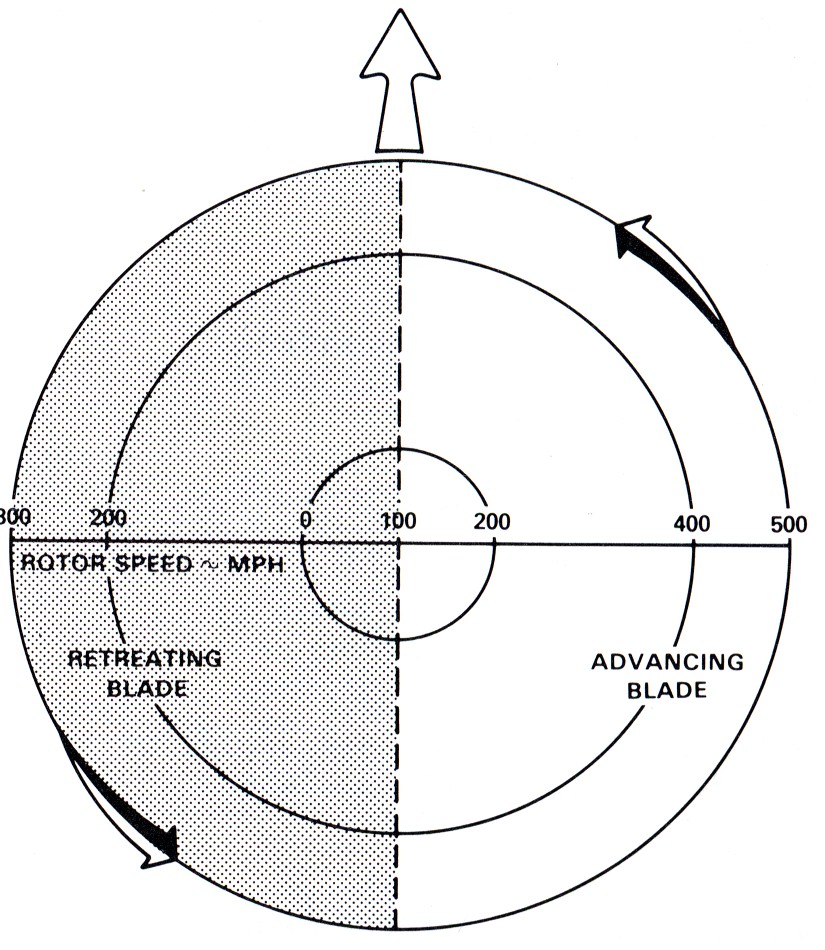
Kopteri hõljumine
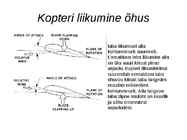
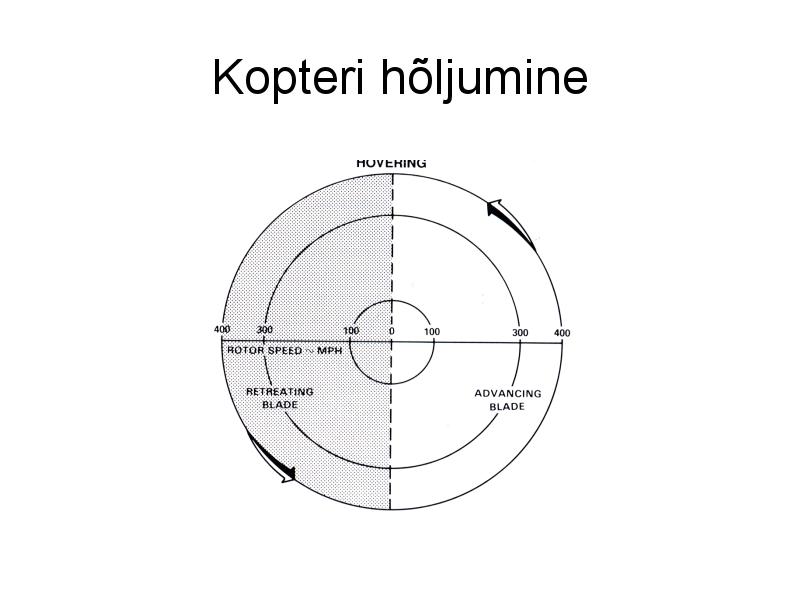
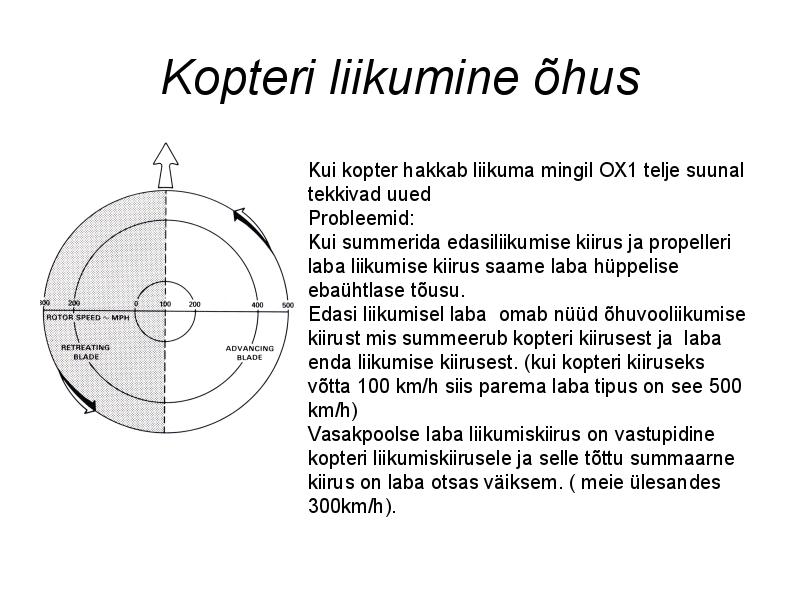
Kopteri liikumine õhusKui kopter hakkab liikuma mingil OX1 telje suunal
tekkivad uued
Probleemid:
Kui summerida edasiliikumise kiirus ja propelleri
laba liikumise kiirus saame laba hüppelise
ebaühtlase tõusu.
Edasi liikumisel laba omab nüüd õhuvooliikumise
kiirust mis summeerub kopteri kiirusest ja laba
enda liikumise kiirusest. (kui kopteri kiiruseks
võtta 100 km/h siis parema laba tipus on see 500
km/h)
Vasakpoolse laba
liikumiskiirus on
vastupidine kopteri liikumiskiirusele ja selle tõttu
summaarne kiirus on laba otsas väiksem. ( meie ülesandes
300km/h).
Kopteri liikumine õhus• Mõlemad kiirused mõjutavad teineteist muutes kopteri
telje asendit OY0 telje suhtes ruumis.
• Ki ruste vahe võib muutuda aktuaalseks mõnes rootori
laba osas kus õhuvoog li gub vastupidiselt kopteri
li kumise suunale. Sel ine erinevus kopteri rootori
erinevatel külgedel mõjutab rootori laba asendit.
• tekkib rootori parempoolse ja vasak
poolse laba kiiruste
erinevus.
• Kui me ei taha muuta rootori labade kohtumisnurki si s
tõstejõud mis produtseeritakse edasili kuva labaga on
suurem kui tõstejõud tagasili kuval labal.
• Tõstejõud on funktsioon aerodünaamilisest rõhust , mis
suureneb õhu li kumiski ruse
ruudus .
2
ρ
VY =
CY2
• Järelikult samuti suureneb ka rootori laba tõstejõud.
Kopteri liikumine õhus• Kui kinnitada rootori labad hingedega rootori külge siis rootori
käivitamisel tsentrifugaaljõud venitavad nad
sirgeks ja iga laba
toetudes hinge abil oma pesas rootori külge võtab oma asendi.
• Kopteri tõusul rootori labad moodustavad oma võlli telje suhtes
koonuse.
• Kui labad on vabad, si s nad li guvad iseseisvalt. Tõstejõus võib
tõsta vaba laba üles. Samal ajal tema kohtumisnurk väheneb ja tõus
peatub kuni toimub tõstejõu sel ine vähenemine, et laba li gub alla.
Kui rootori laba li gub alla suureneb tema kohtumisnurk ja nüüd
tekkib moment kus laba al a liikumine peatub ja tõstejõus
suurenedes hakkab laba suunama üles.
• Ni toimub labade viibutus rootori pöörlemisel ümber telje.
• Probleemi on labade balansis (erinev kaal; aerodünaamilised
omaduses , konstruktsioonilised omadused,
painduvus jms.)
• See peab olema minimaalne. Tänapäeval kõik rootori on
komplekteeritud ja häälestatud.
• Kasutatakse pooltäpseid rootoreid, mis reguleeritakse välja
kohapeal ja täpseid rootoreid, millede labad on küllaltpaindlikud, et
kõrvaldada kõikumise fluktuatsioonid iseseisvalt.
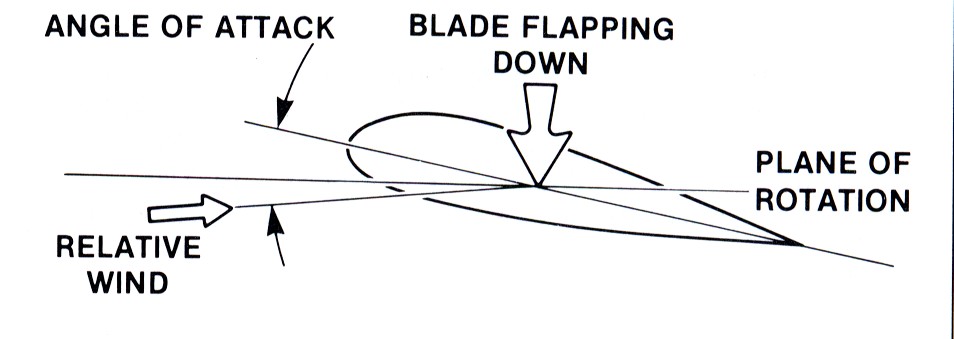
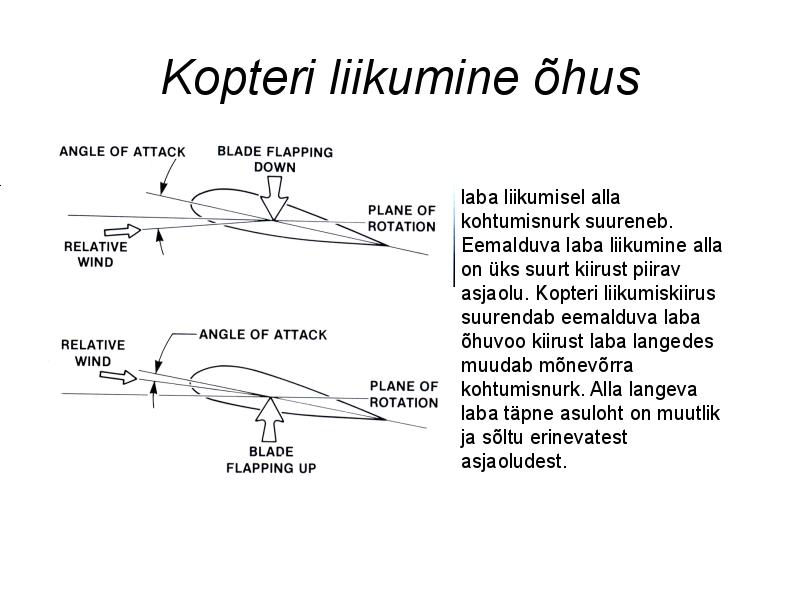
Kopteri liikumine õhuslaba liikumisel alla
kohtumisnurk suureneb.
Eemalduva laba liikumine alla
on üks suurt kiirust piirav
asjaolu. Kopteri liikumiskiirus
suurendab eemalduva laba
õhuvoo kiirust laba langedes
muudab mõnevõrra
kohtumisnurk. Alla
langeva laba täpne asuloht on
muutlik ja sõltu erinevatest
asjaoludest.
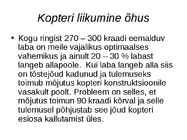
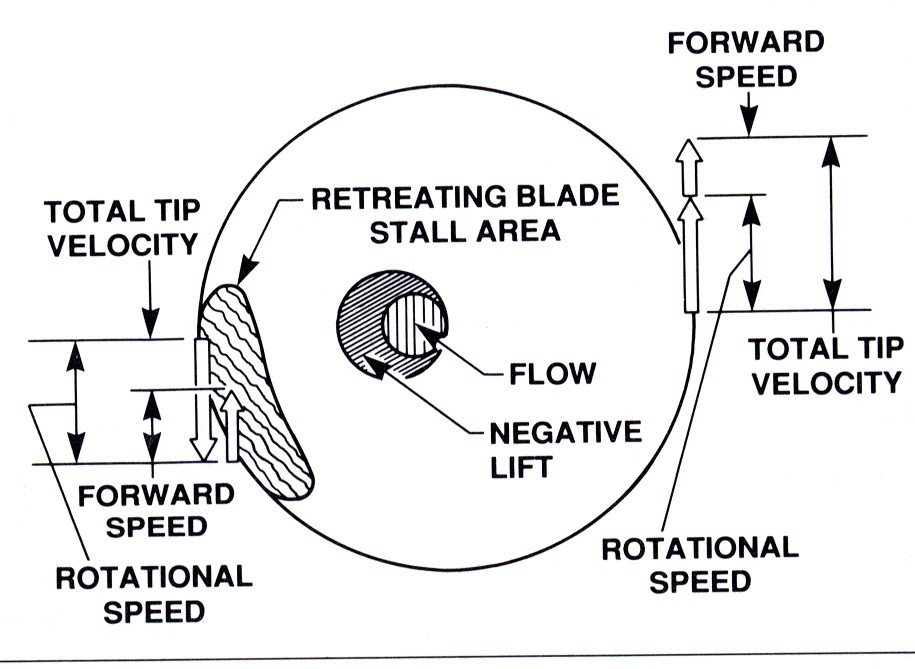
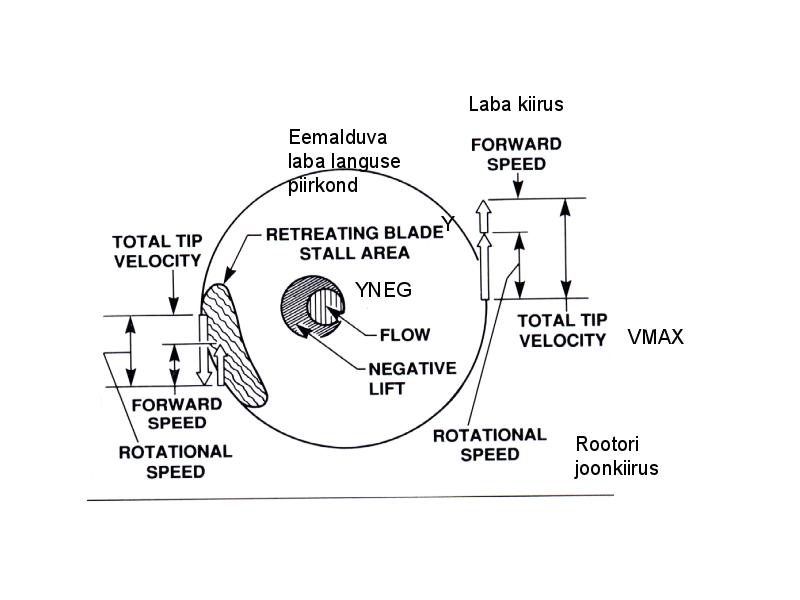
Kopteri liikumine õhus• Kogu ringist 270 – 300 kraadi eemalduv
laba on meile vajalikus optimaalses
vahemikus ja ainult 20 – 30 % labast
langeb allapoole. Kui laba langeb alla siis
on tõstejõud kadunud ja tulemuseks
toimub mõjutus kopteri konstruktsioonile
vasakult poolt. Probleem on selles, et
mõjutus toimun 90 kraadi kõrval ja selle
tulemusel põhjustab see jõud kopteri
esiosa kallutamist üles.
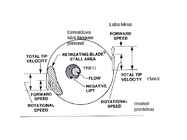
Laba kiirus
Eemalduva
laba languse
piirkond
Y
YNEG
VMAX
Rootori
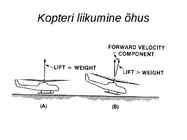
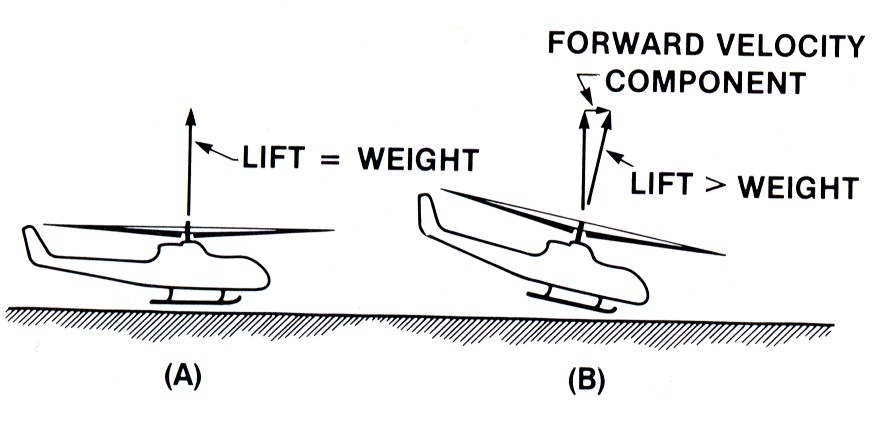
joonkiirus Kopteri liikumine õhusKopteri liikumine õhus• Kui kopter hõljub maapinnakohal si s tema kaal
võrdsustub tõstejõuga.
• Juhul kui kopter li gub mingis suunas maapinna
kohal siis tema kaal ei võrdsustu enam
tõstejõuga mida tekitab rootori koonus
• tõsteõud koosneb kahest
komponendist ja on
alati suurem kopteri
kaalust .
• Al a langeva rootori laba mõju rootori poolt
tekitatud tõstejõu suunale (Tõstejõu
translatsioon )
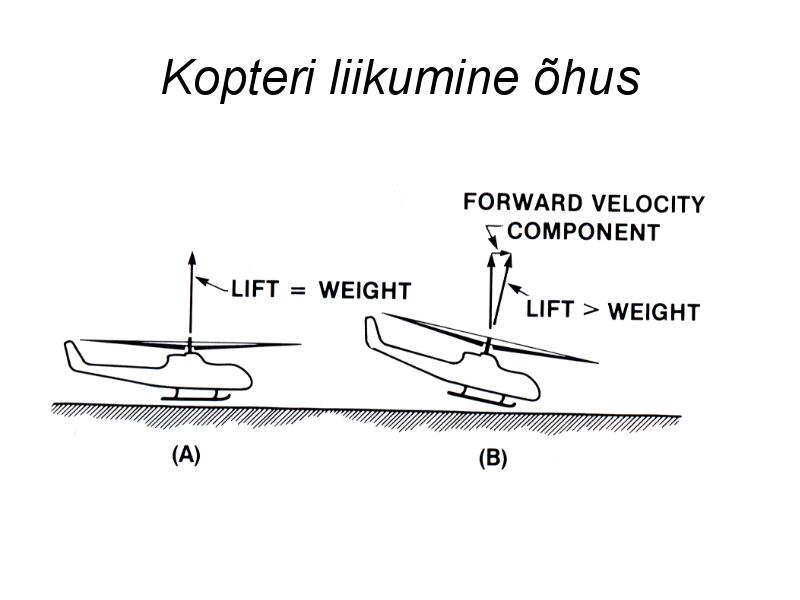
Kopteri liikumine õhusKopteri liikumine õhus• Kui kopter tahab hõljuvast asendist üle minna li kumisele
mingis suunas siis tuleb piloodil pöörata rootori koonust
sel eks et tekitada jõud YV
• Sel e jõu suurus peab ületama takistusjõu Q . Samal
ajal kopter langeb veidi. al apoole kus on õhutihedus
suurem ja tekkib maapinna efekt
• Sel eks, et peatada langus ja suurendada kiirust
horisontaaltasapinnas tuleb kal utada rootorit veelgi.
Mõlema vektori summeerimisel saame tõstejõu mis
ületab kopterile mõjuva gravitatsioonijõu. See on aga
suurem kui kopteri kaal.
Kopteri liikumine õhus
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46













































Kõik kommentaarid