Juhtimisseadmed ja veermik (0)
Microsoft Word - E-rool
E-koolitus aines „Juhtimisseadmed ja veermik“
Juhtimisseadmed
Käesolevas koolitusmaterjalis on juhtimisseadmete all mõeldud sõiduauto rooliseadet.
Rooliseadme ülesandeks on võimaldada auto liikumise ajal tema liikumissuunda muuta.
Sõiduautodel mõjutab rooliseade liikumissuuna muutmiseks esirattaid.
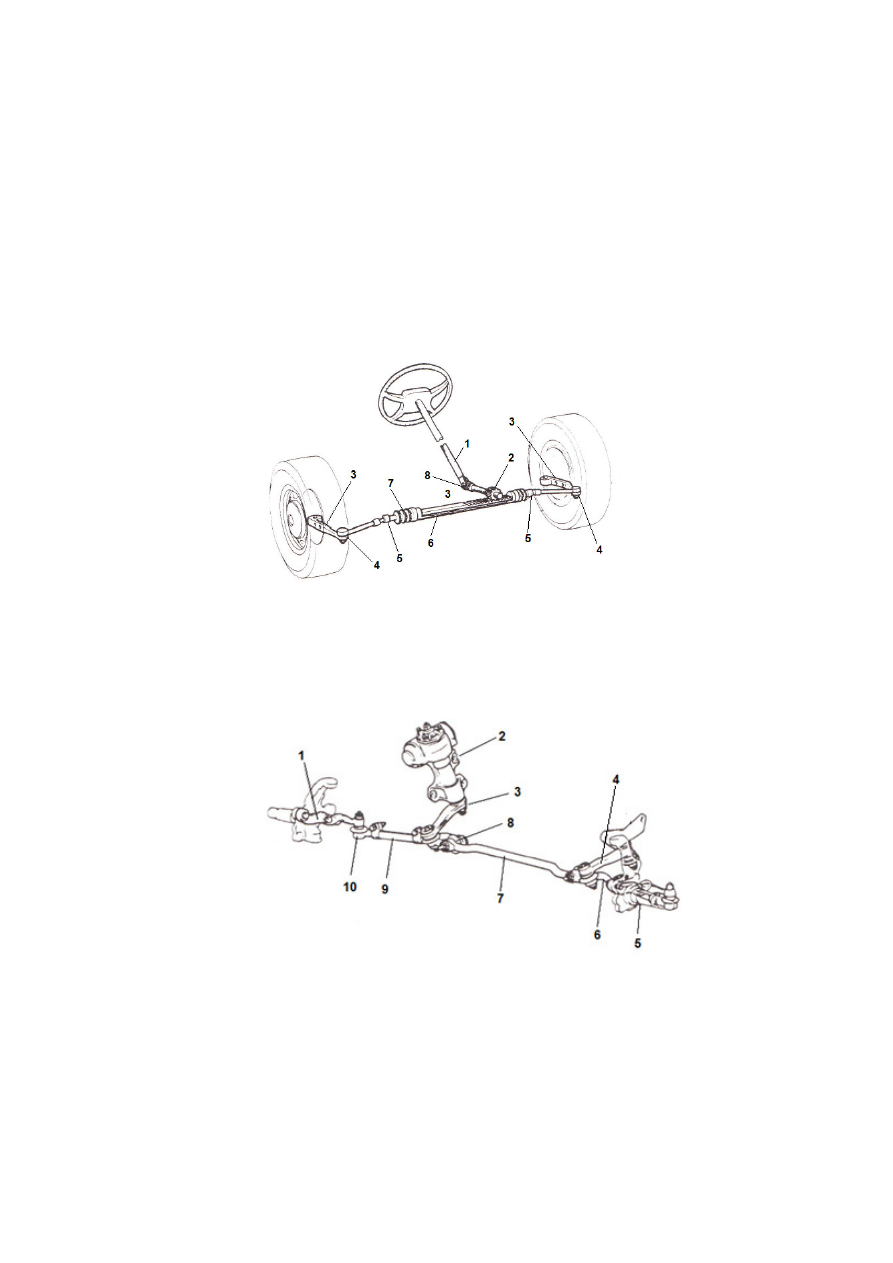
Rooliseade koosneb:
1. Roolimehhanism koos roolirattaga
2. Roolivõimendi
3. Rooliajam
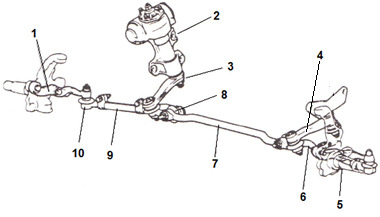
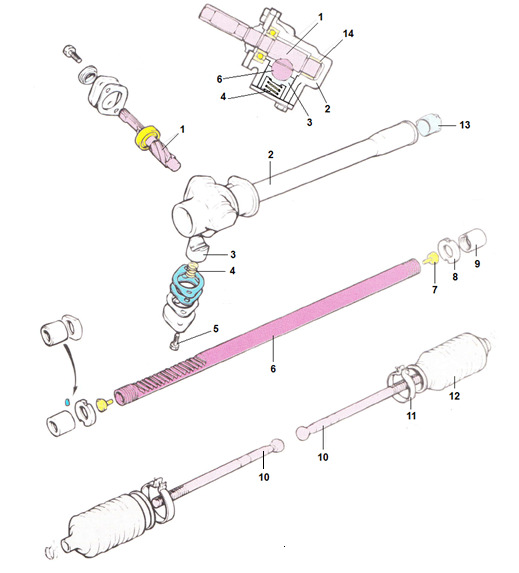
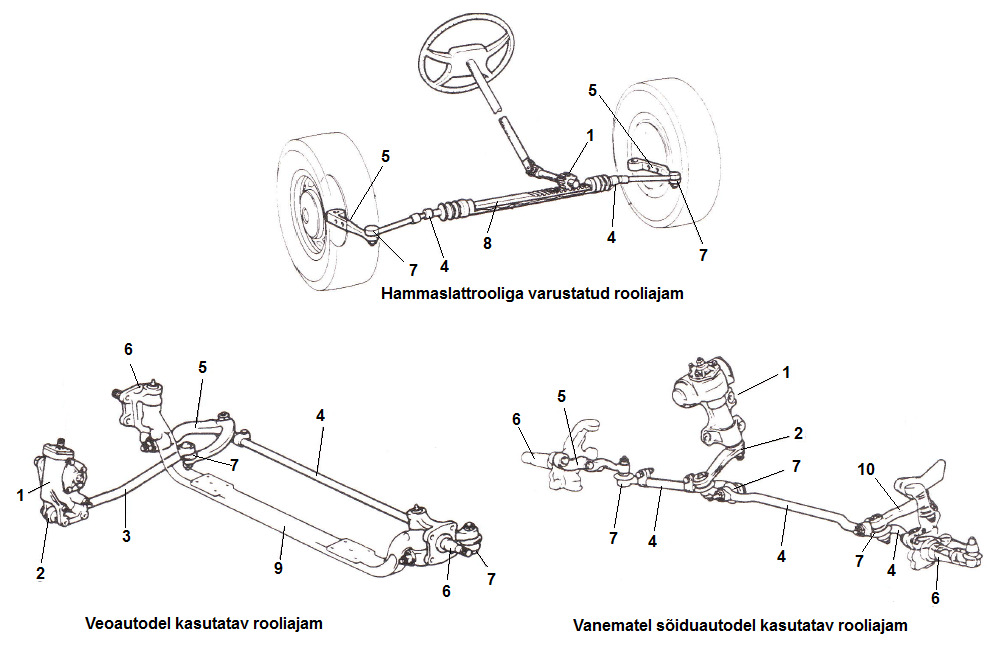
1 – roolivõll ja rooliratas, 2 – roolimehhanism (hammaslattajam), 3 – käänmiku hoob,
4 – kuulliigend, 5 – reguleeritav otsik, 6 – hammaslatt, 7 – roolimehhanismi väljund,
8 – kardaanliigend.
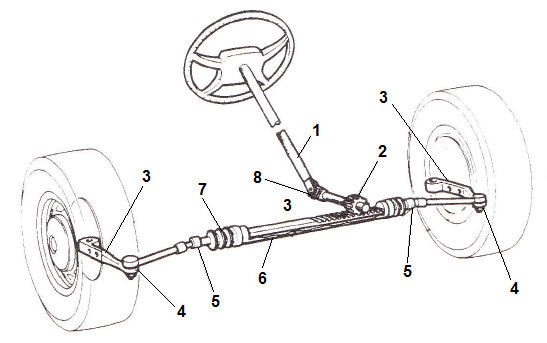
1 – käändhoob, 2 – roolimehhanism, 3 – roolihoob, 4 – pendelhoob, 5 – käänmik,
6 – külgvarras, 7 – põikvarras, 8 – kuulliigend, 9 – külgvarras, 10 - kuulliigend
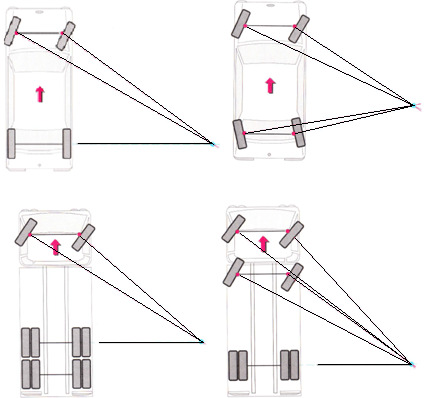
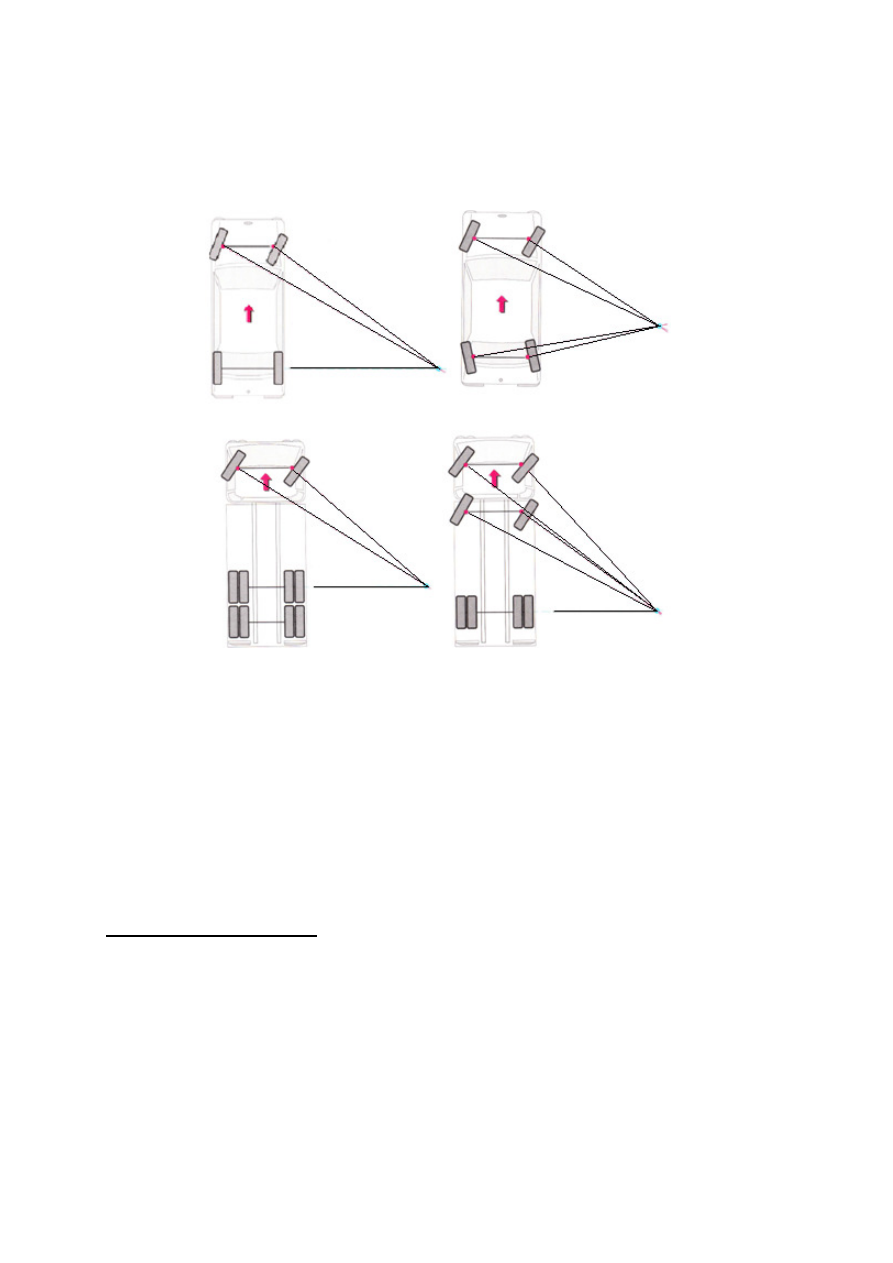
Rataste pööramisel peavad kõikide rataste teljed lõikuma ühes punktis. See saavutatakse
rooliajami varraste abil.
Näiteks:
Roolimehhanism
Roolimehhanismiülesandeks on
suurendada autojuhi
poolt roolirattale antud
pöördemomenti ja anda see edasi roolivõimendi kaudu rooliajamile. Vanematel autodel
roolivõimendi puudus ja siis oli rooli keeramine raskemates tingimustes tülikas, kaasajal
kergendavad roolivõimendid seda tunduvalt. Roolimehhanism kujutab endast
hammasülekannet ligikaudse ülekandearvuga ≈ 20, sõltuvalt autost.
Roolimehhanismide tüübid:
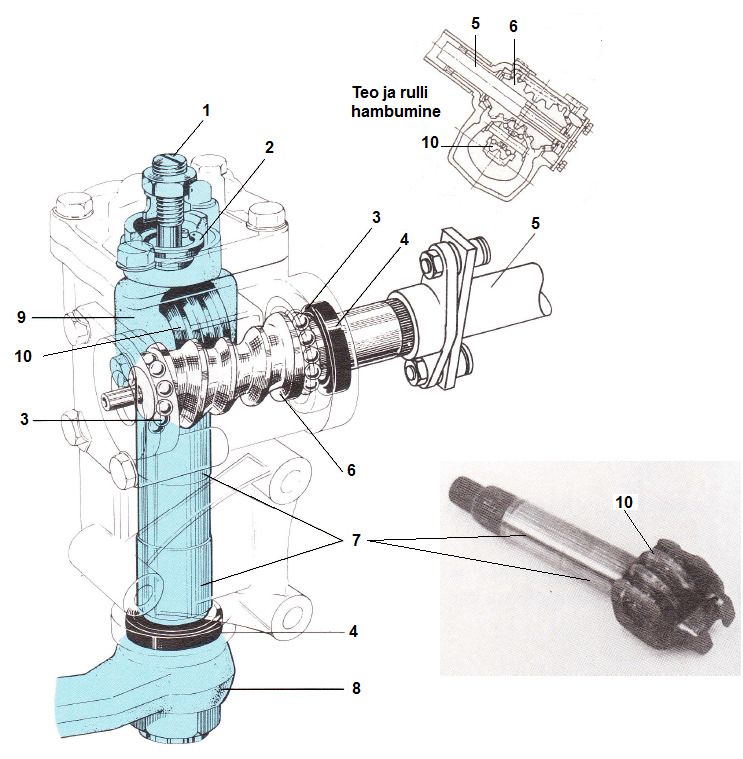
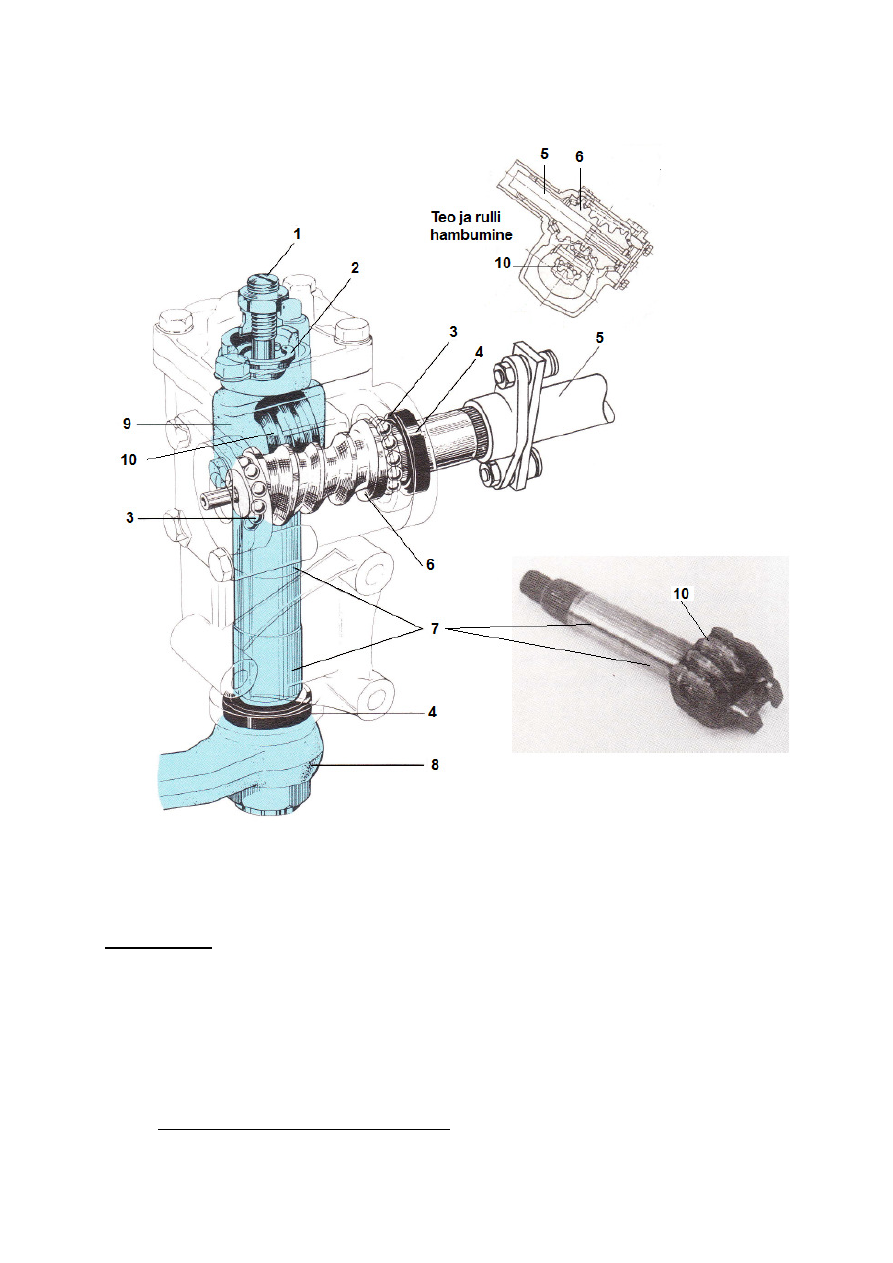
1. Tigu-rull tüüpi roolimehhanism. See roolimehhanism oli varasematel autodel
väga levinud. Kaasajal esineb seda roolimehhanismi harvem. Selle
roolimehhanismi puuduseks loetakse tema rasket sobitamist roolivõimendiga.
Tavaliselt ongi need roolimehhanismid ilma võimendita ja see on ka üheks
põhjuseks, miks sellist tüüpi roolimehhanismi praktiliselt enam ei kasutata.
1 – reguleerkruvi, millega reguleeritakse teo (6) ja rulli (10) vahelist hambumist,
2 – ristvõlli stopperseib, 3 – teolaagrid, 4 – tihend, 5 – roolivõll, 6 – globoidtigu (keskelt
nõgus tigu), 7 – ristvõlli liugelaagripinnad, 8 – roolihoob, 9 – ristvõll, 10 – rull.
Tööpõhimõte: rooliratta pööramisel pööratakse roolivõlli (5), mille alumises otsas on
keskelt nõgus globoidtigu (6). Teo pööramisel hakkab rull (10) liikuma piki teo hambaid,
pannes sellega ristvõlli (9) pöörduma. Ristvõll (9) annab selle pöördumise edasi
roolihoovale (8), mis omakorda paneb tööle rooliajami.
2. Hammaslatt – roolimehhanism on hetkel kõige levinum roolimehhanism
sõiduautodel. Selle eelised eeltoodud roolimehhanismi ees:
1.1. Ehituselt lihtsam
1.2. Hinnalt odavam
1.3. Kergem
1.4. Sobitub hästi roolivõimendiga, mida kaasaegsetel sõiduautodel ka laialt
kasutatakse.
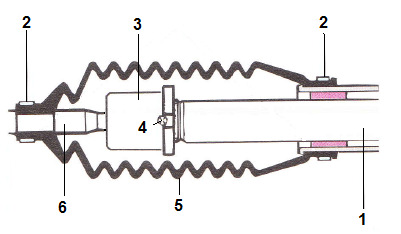
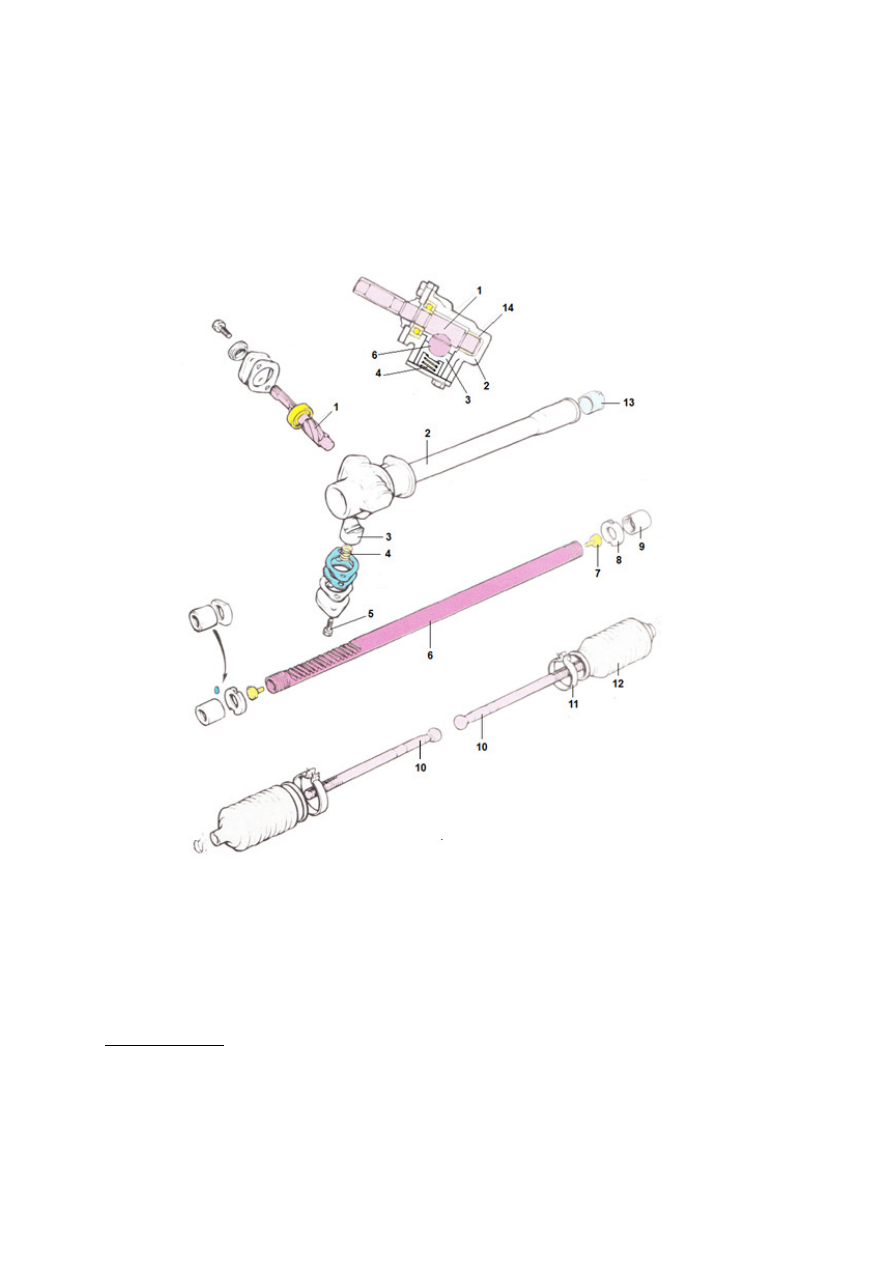
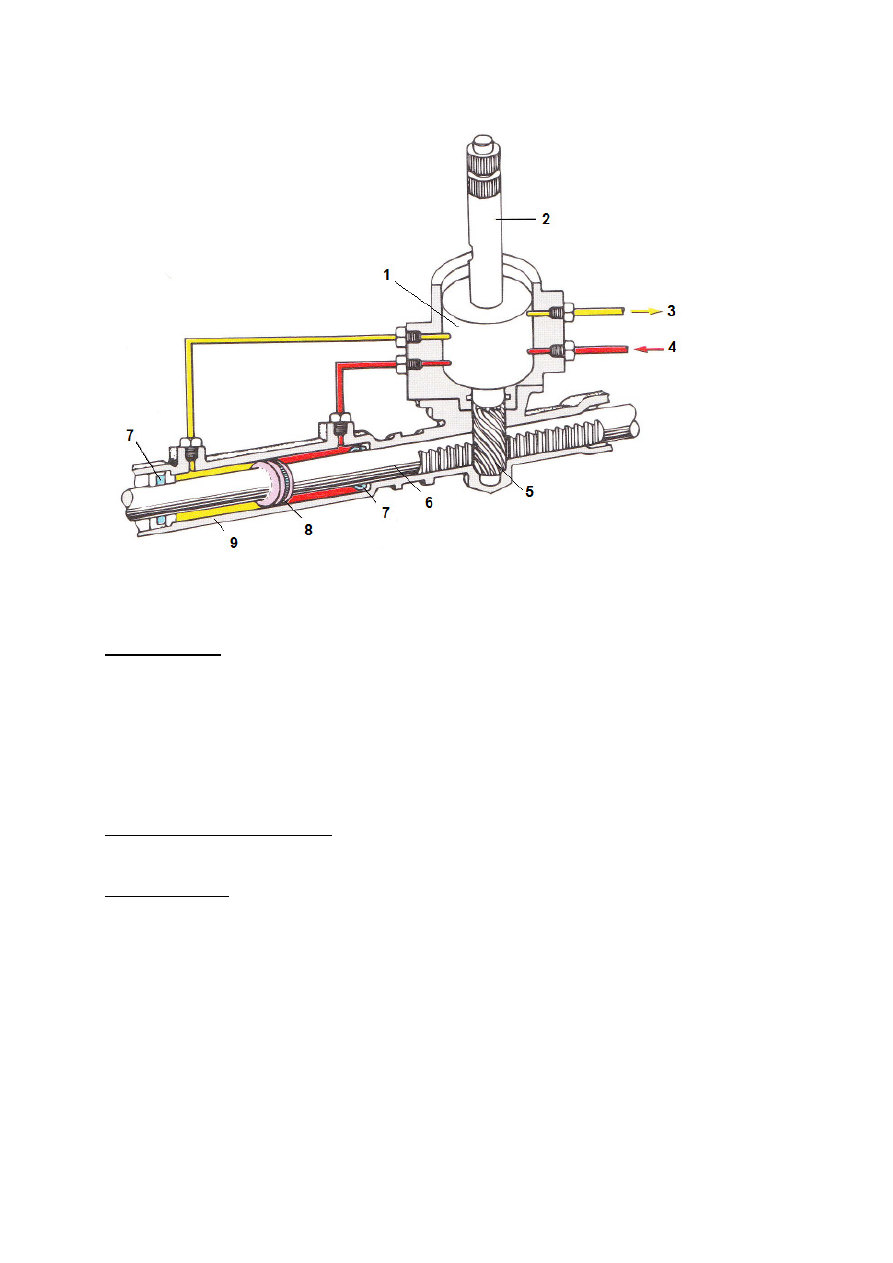
Hammaslatt – roolimehhanismi ehitus (ilma roolivõimendita):
1 – ajamihammasratas, mis saab pöörlemise roolivõlli kaudu roolirattalt, 2 – hammaslatti
kattev kere, 3 – hammaslati reguleertugi, millega reguleeritakse ajamihammasratta (1) ja
hammaslati (6) vahelist hambumist, 4 – reguleertoe vedru, 5 – reguleerkruvi, 6 – hammas-
latt, 7 – kuulotsiku sisepesa, 8 – kuulotsiku stoppermutter, 9 – kuulotsiku välispesa, 10 –
kuulotsikuga külgvarras, 11 – kummikatte kinnitusklamber, 12 – kummikate, 13 –
hammaslati tugipuks, 14 – ajamihammasratta võlli nõellaager.
Tööpõhimõte: Rooliratta keeramisel pööratakse ajamihammasratast (1), mis paneb
liikuma hammaslati (6). Hammaslati (6) otstesse on kuulotsikute kaudu(7;8;9) kinnitatud
paralleelvardad (10). Viimased on kuulliigendite kaudu ühendatud käändhoobadega,
mille liigutamine pöörabki rattaid.
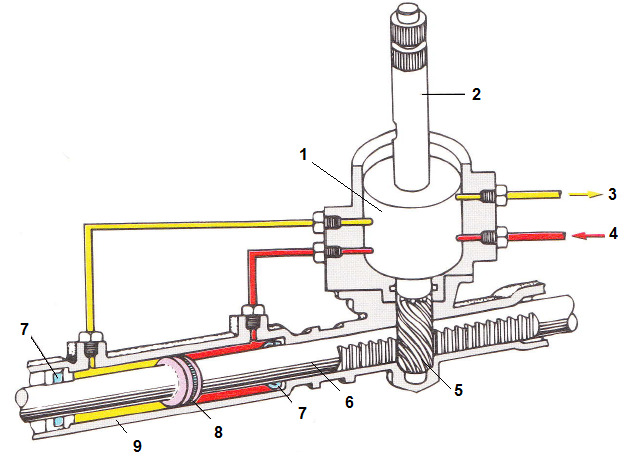
Kuivõrd hammaslatt - roolimehhanism on väga sageli koostöös roolivõimendiga, siis
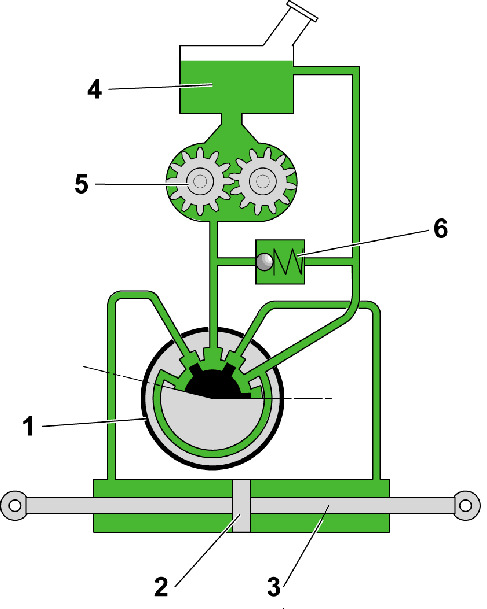
alljärgnev skeem näitabki nende koostööd:
1 – roolivõimendi hüdrauliline juhtplokk, 2 – juhtvõll, 3 – õli väljavool õlianumasse, 4 –
õlirõhk hüdropumbast, 5 – ajamihammasratas, 6 – hammaslatt, 7 – tihend, 8 – võimendi
kolb koos tihendiga, 9 – võimendi silinder.
Tööpõhimõte: rooliratta keeramisel pööratakse ajamivõlli(2) koos ajamihammasrattaga
(5). Juhtplokis (1) suunatakse hüdropumbast tulev rõhk (4) kas paremale või vasakule
poole võimendi kolbi (8), sõltuvalt rooli keeramise suunast. Teiselt poolt võimendi kolbi
juhitakse vabalt tagasivoolav õli anumasse (3). Õlirõhk võimendi silindris (9) aitab kaasa
hammaslati (6) liikumise suunale.
Õlirõhku tekitav hüdropump saab tavaliselt oma ajami mootori väntvõlli rihmarattalt
kiilrihma kaudu.
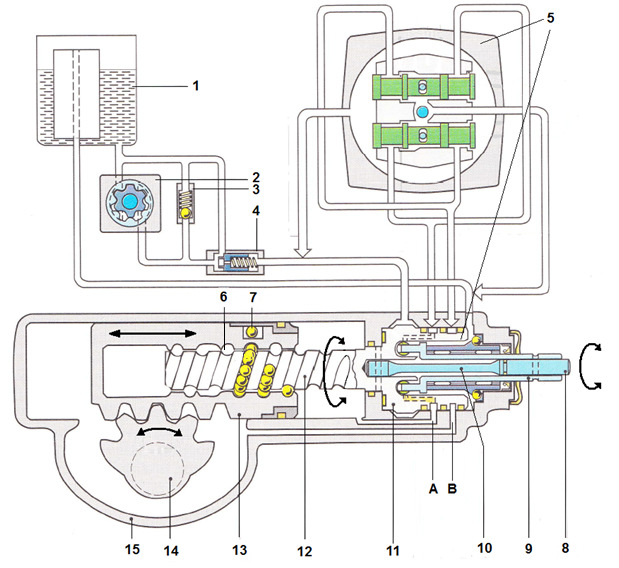
Hammaslatt-hammassektor tüüpi roolimehhanisme kasutatakse suurematel veoautodel.
Need on kahekordse ülekandega roolimehhanismid ja reeglina varustatud ka võimendiga,
mis asub roolimehhanismiga ühises keres.
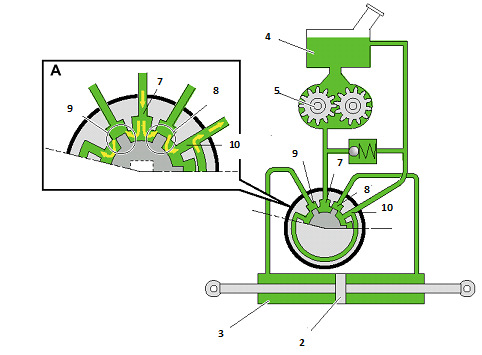
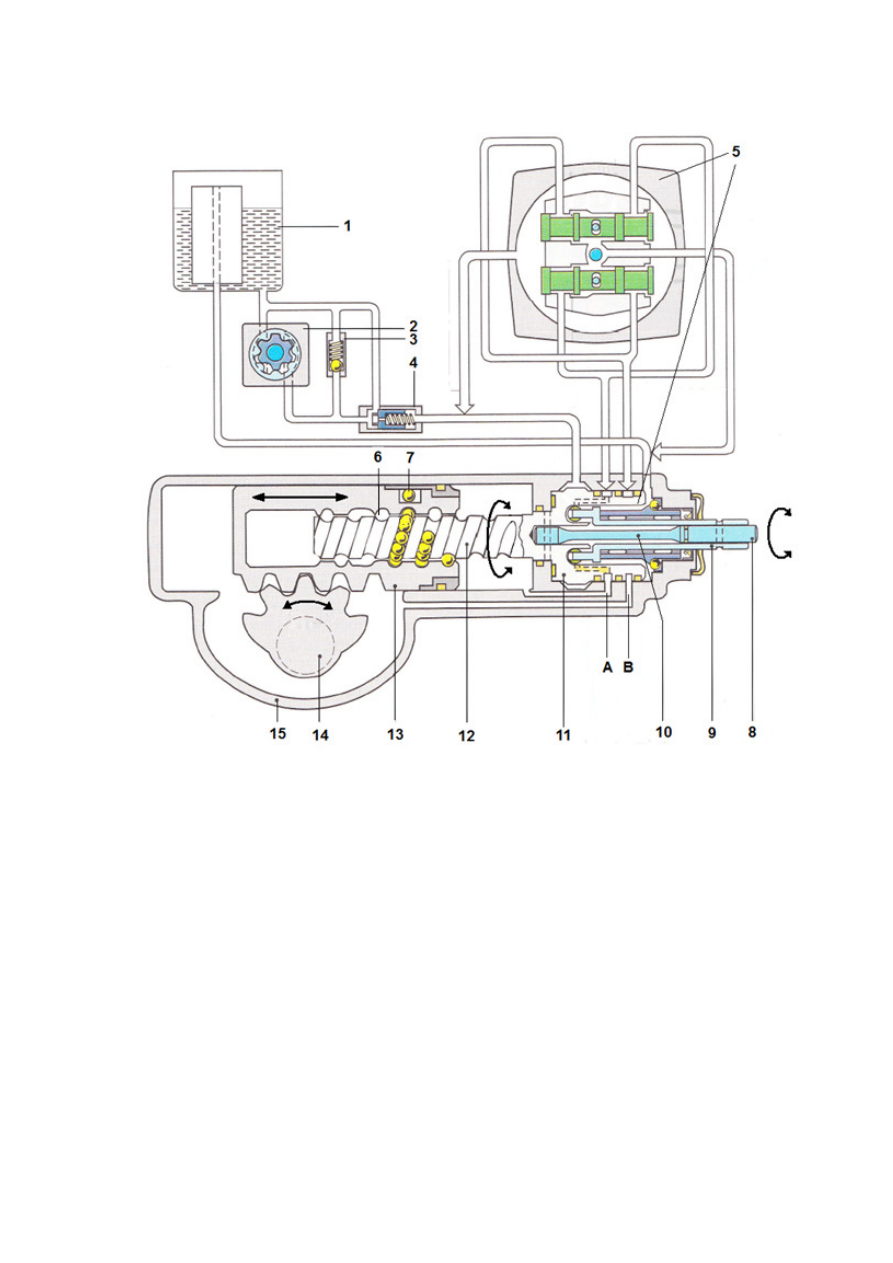
Tööpõhimõte: rooliratta keeramisel pööratakse juhtvõlli (8) ja koos sellega kruvi (12).
Kruvi soontes paiknevad kuulid sunnivad hammaskolbi (13) pikisuunas liikuma.
Hammaskolb, olles hambumises hammassektoriga (14), pöörab sektorit ja sellega koos
ristvõlli, mille otsa on kinnitatud roolihoob. Viimane paneb liikuma kogu rooliajami.
Võimendi on hüdrauliline, hüdropump (2) saab ajami mootori väntvõllilt kiilrihma kaudu.
Pumba rõhk antakse juhtklapi (5) juurde, mis jagab selle vastavalt roolratta pööramise
suunale kanalite (A) ja (B) kaudu kas paremale või vasakule poole hammaskolbi(13).
Vastavalt sellele, kummale poole õlirõhk antakse, hakkab õlirõhk lükkama kolbi kas siis
paremale või vasakule, kergendades sellega kolvi liikumist.
1 – õlianum filtriga, 2 – õlipump, mis saab oma ajami mootori väntvõllilt kiilrihma kaudu,
3 – rõhuklapp, 4 – õli koguse klapp, 5 – roolivõimendi hüdrauliline juhtklapp, 6 – kuulide
kanal, 7 – kuulid, 8 – juhtvõll, 9 – juhtvõlli pesa, 10 – juhtvõlli väänduv osa, 11 – juhtsiiber,
12 – kruvi, mis saab pöörlemise juhtvõllilt (8) ja annab edasi pikiliikumise hammaskolvile
(13), 13 – hammaskolb, on hambumises sektoriga (14) ja hammaskolvi pikiliikumine
pöörab hammassektorit (14), 14 – hammassektor, on ristvõllil ja selle külge ühendub
roolihoob, 15 – roolimehhanismi/võimendi kere.
Rooliajam
Rooliajam võtab vastu roolimehhanismilt/võimendilt rataste pööramiseks vajaliku liikumise.
Rooliajam koosneb põhiliselt varrastest, hoobadest ja liigenditest:
1 – roolimehhanism, 2 – roolihoob (hammaslattroolil see puudub), 3 – pikivarras (on ainult
sõltuva esivedrustusega rooliseadmel), 4 – põikvarras (hammaslattroolil on selle asemel
külgvardad), 5 – käändhoob, 6 – käänmik, 7 – kuulliigend, 8 – hammaslatt, 9 – sõltuva
vedrustuse esisilla tala, 10 – pendelhoob.
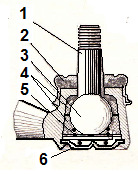
Omavahel liikuvad vardad ja hoovad ühendatakse šarniirsete kuulliigenditega. Kaasajal on
kuulliigendid mittelahtivõetavad ja kulumisest tingitud lõtku korral see kuulliigend
vahetatakse.
1 – Kuulliigendi sõrm, mis oma ülemise, koonilise osaga
ühendub teise vardaga (hoovaga), 2 – tolmukaitse,
3 – kuulliigendi sfääriline osa, mida ümbritsevad plastliuad,
4 – plastliuad, 5 – vedru, 6 – kinnivaltsitud kaas.
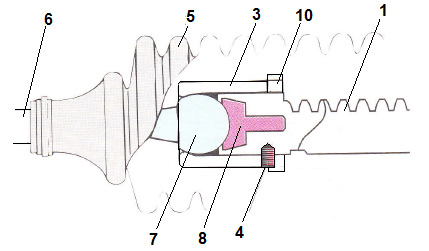
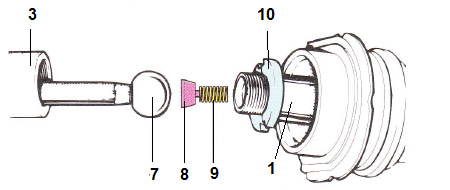
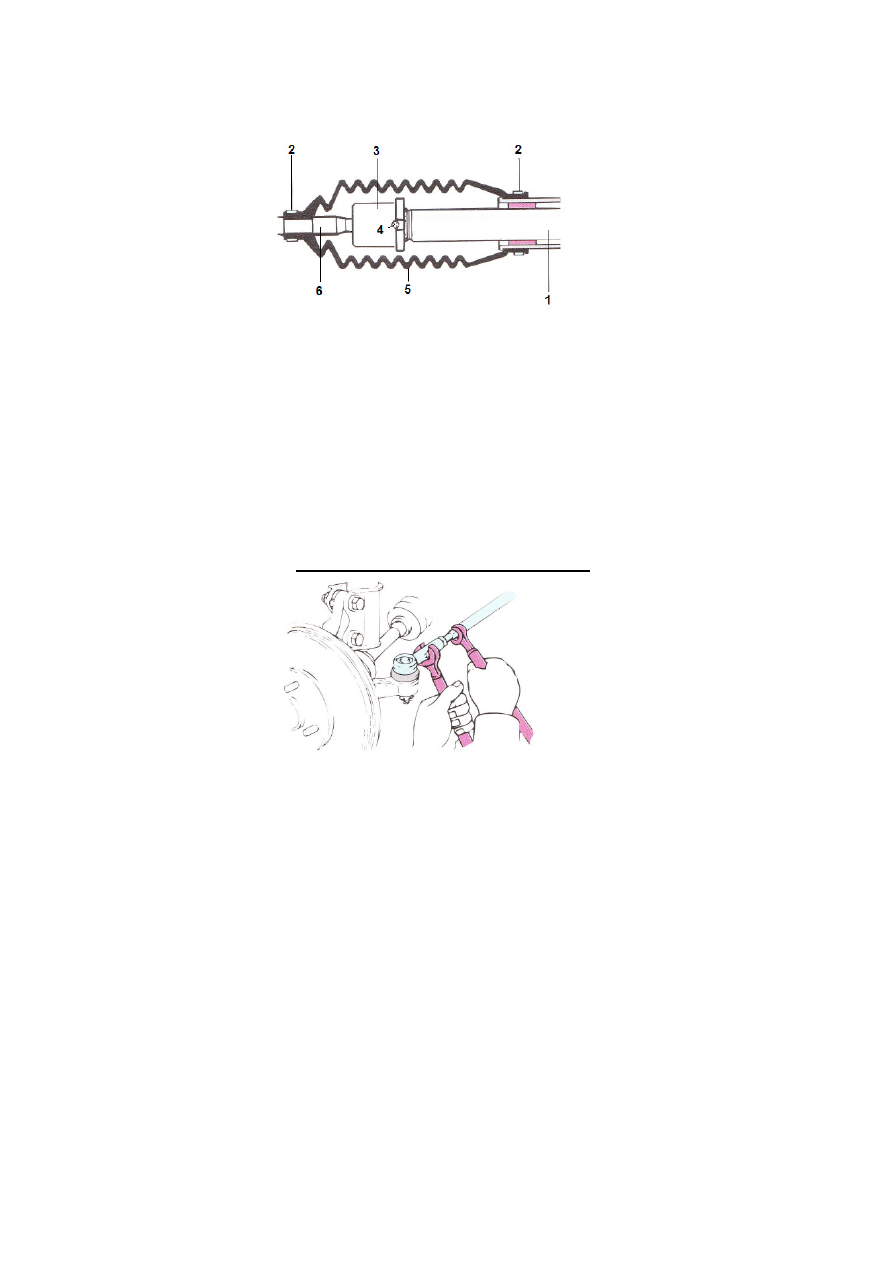
Kuulliigendit kasutatakse ka hammaslatilt pikisuunalise
liikumise ülekandmiseks külgvarrastele:
1 – hammaslatt, 2 – tolmukaitse kinnitusklamber, 3 – kuulotsiku välispesa, 4 – fikseeriv
tihvt, 5 – tolmukaitse, 6 – külgvarras, 7 – külgvarda kuulotsik, 8 – kuulotsiku sisepesa, 9 –
vedru, 10 – kuulotsiku stoppermutter.
Tänu kuulliigenditele saavad rooliajami vardad ja hoovad üksteise suhtes liikuda, näiteks
rooli keeramise ajal või auto ratta üles-alla liikumisel.
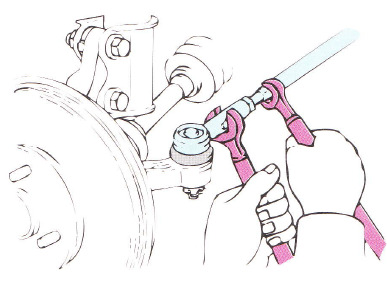
Reeglina on paralleelvardal või külgvarrastel reguleeritavad otsikud, mille abil on võimalik
reguleerida rataste kokku- või lahkujooksu.
Kokku- või lahkujooksu reguleerimine:
Roolivõimendi
Kaasaegsed sõiduautod, rääkimata veoautodest, on varustatud roolivõimendiga. See
kergendab auto juhtimist raskemates tingimustes, nagu näiteks manööverdamistel,
sõitmisel maastikul vms. Enamus roolivõimendeid on hüdraulilised, see tähendab, et rooli
keeramisel vajalik lisajõud tekitatakse õlirõhu poolt. Seega on hüdrauliliste roolivõimendite
üheks tähtsamaks osaks õlipump. Kaasajal on suuremal osal autodest kasutusel mootori
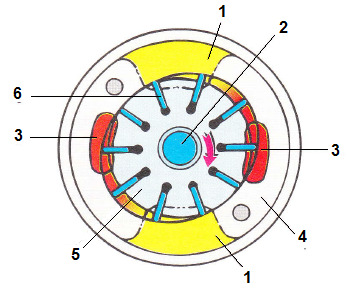
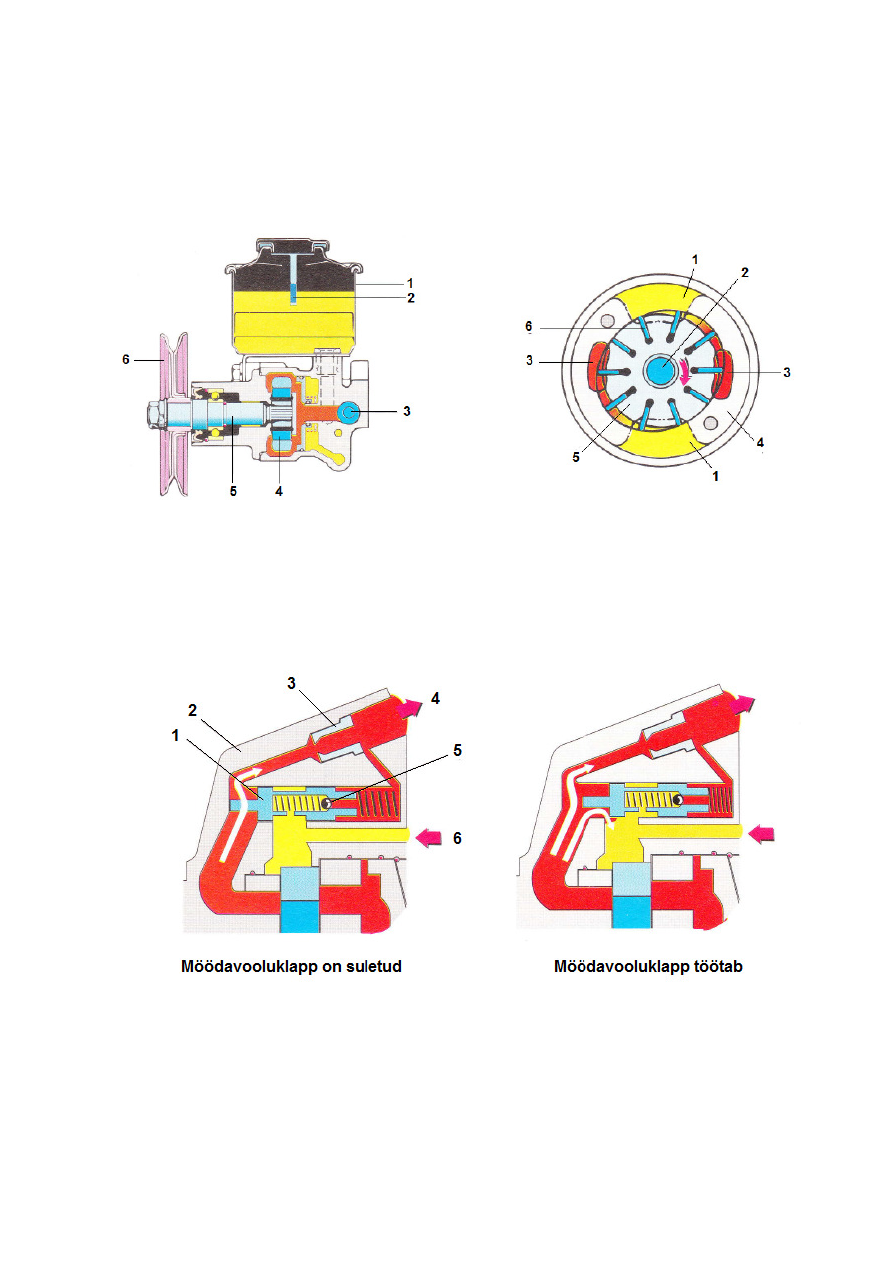
väntvõllilt kiilrihmajamiga käitatav õlipump. Tavaliselt on see labadega rootorpump:
Ovaalses tööruumis (4) paikneb labadega varustud rootor. Rootori pöörlemisel paiskuvad
rootori labad tsentrifugaaljõu toimel väljapoole, toetumiseni tööruumi siseseintele. Kui laba
liigub õli sisendi ruumi(1) juurest läbi, haarab ta sealt õli ja kannab seda pöörlemise
suunas edasi rõhuruumi (3) juurde. Sealt surutakse õli rõhu all võimendi poole. Laba
liikumisel õli sisendiruumi juurest edasi läheb tööruum suuremaks, tekitades õlihõrenduse
ja kui laba on liikunud üle poole oma tööruumist, hakkab tööruum vähenema, tekitades
õlile rõhu.
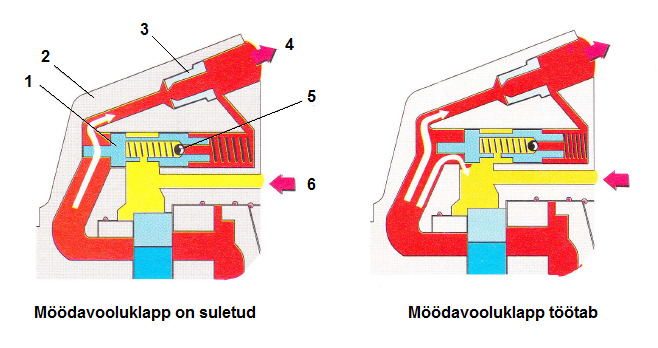
Mootori väntvõlli suurematel pöörlemissagedustel hakkab ka õlipumba rootor kiiremini
tööle ja tekib oht, et õlipump hakkab tootma liiga palju rõhku. Siis hakkab tööle
möödavooluklapp, mille kolb surutakse sissepoole, klapp avaneb ja laseb liigse õli tagasi
sissevoolu kanalisse. Kui aga rõhk ikkagi tõuseb liiga kõrgele (mõnel pumbatüübil isegi
650 …700 kPa), siis avaneb ka rõhuklapp.
Möödavooluklapi töötamine
1 – möödavooluklapp 2 – pumba kere 3 – düüs 4 – õlirõhk võimendile 5 – rõhuklapp
6 – õli anumast
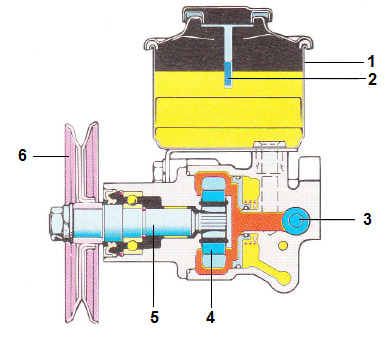
Roolivõimendi pump
1 – õlianum, 2 – õlitaseme mõõtevarras,
3 – õlikoguse reguleerklapp, 4 – rootor,
5 – pumba ajamivõll, 6 - kiilrihmaratas
Roolivõimendi pumba rootori töötamine
1 – õli sisend, 2 – pumba ajamivõll, 3 – õli
väljund rõhu all, 4 – ovaalse avaga tööruum,
5 – rootor, 6 – rootori laba.
Adaptiivse võimendiga rooliseadmed
Need on nö isekohanduvad roolivõimendid, milles rataste pööramiseks antavat lisajõudu
muudetakse vastavalt vajadusele, tavaliselt sõltuvana auto liikumiskiirusest. Enamlevinud
on kahte tüüpi adaptiivseid roolivõimendeid:
1.Arvutijuhitava klapiga töötavad võimendid, milles arvuti abil reguleeritakse jõusilindrile
antavat õlirõhku sõltuvana auto liikumiskiirusest.
2.Mehaaniliselt muudetava õlirõhuga roolivõimendid, milles õlirõhku muudetakse sõltuvalt
mootori väntvõlli pöörlemissagedusest.
ROOLIVÕIMENDI TÖÖPÕHIMÕTE
Tavaliselt sõltub roolivõimendi poolt juhitavatele ratastele antav lisajõud järgmistest
teguritest:
• Roolirattale rakendatud pöördemomendist
• Õlikogusest, mis antakse jaotusklapist jõusilindrile
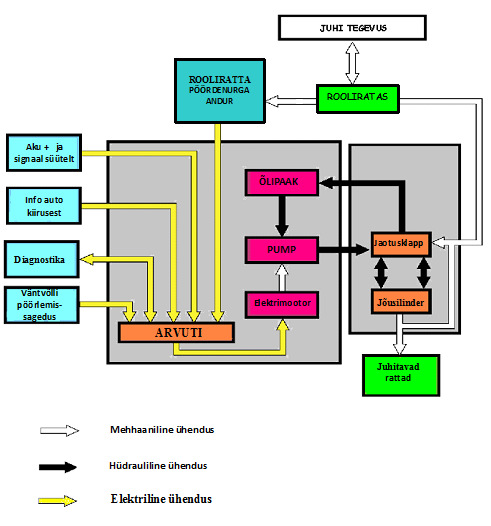
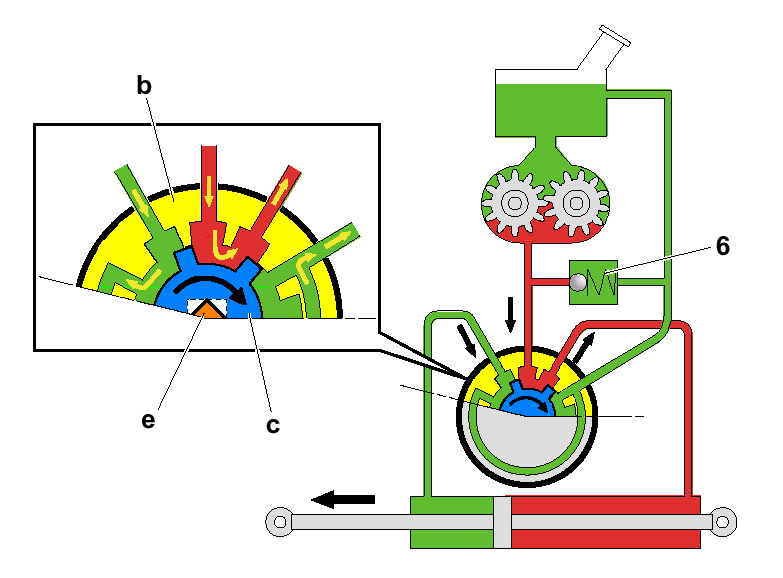
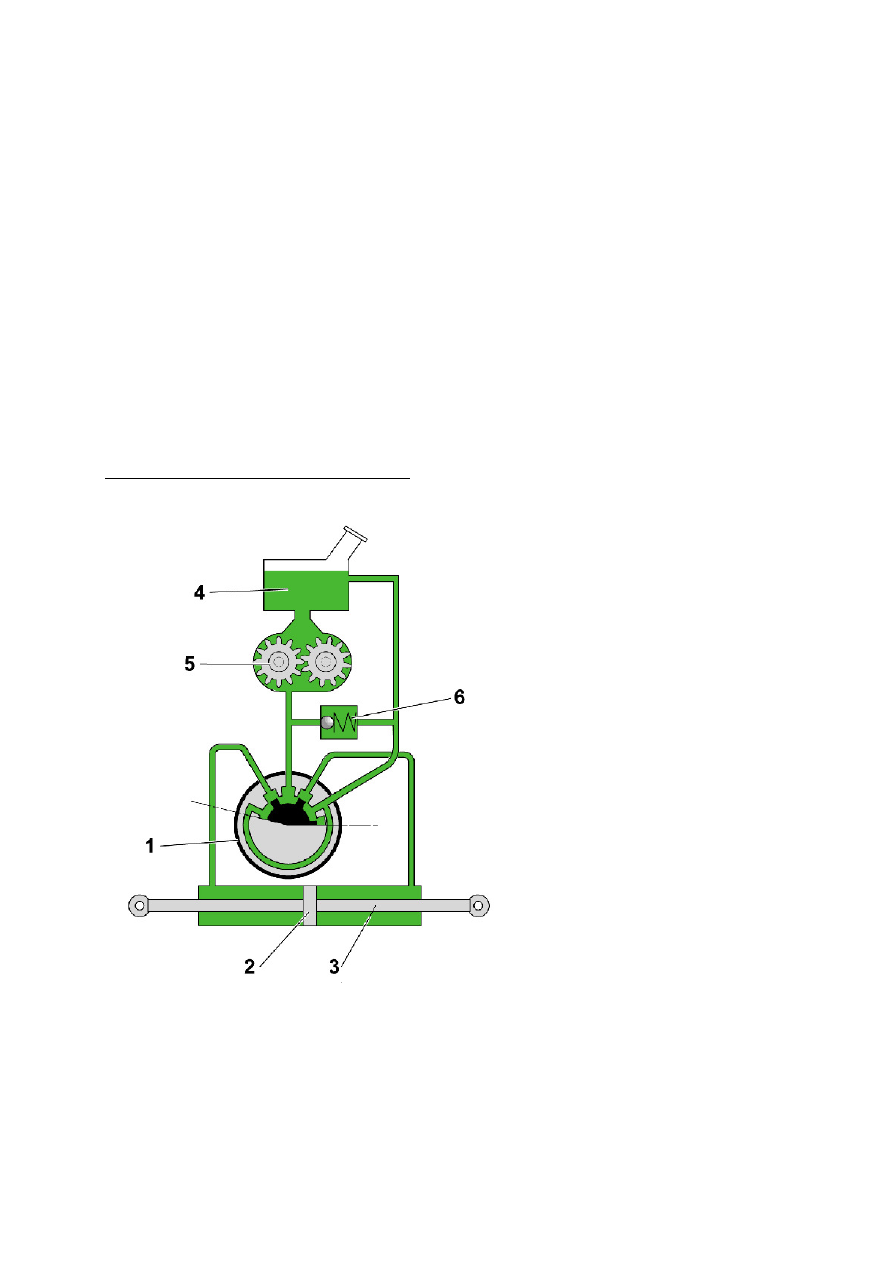
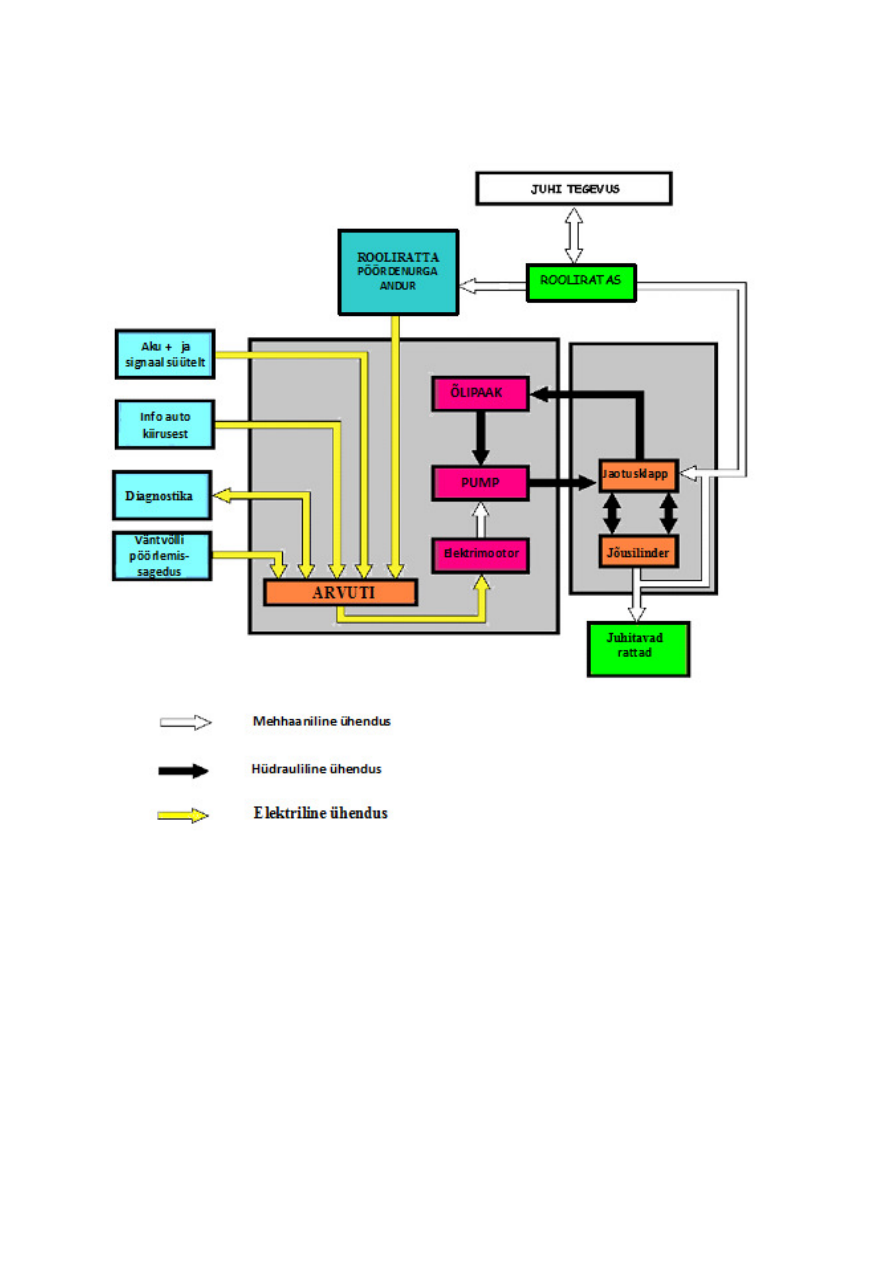
Roolivõimendi põhimõtteline skeem:
1 – jaotusklapp
2 – jõusilindri kolb
3 – hammaslatt
4 – õlipaak
5 – õlipump (hammasratas-tüüpi, rootortüüpi või elektriline)
6 - rõhuklapp
Jaotusklapp
Ülesanne ja üldehitus
Jaotusklapi põhiülesanneteks on:
• Garanteerida õlirõhu pidev etteanne pumbalt jõusilindrile ja sealt tagasi pumpa
• Sõltuvalt rooliratta pööramise suunale, jagada õlirõhku ühele või teisele poole
jõusilindri kolbi
• Reguleerida jõusilindrile antavat õlirõhku sõltuvalt roolirattale rakendatud
pöördemomendile ja pumba tootlikkusele
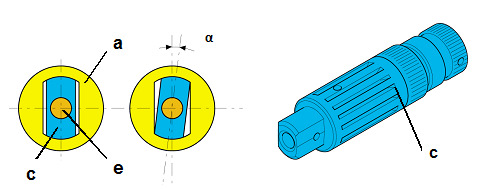
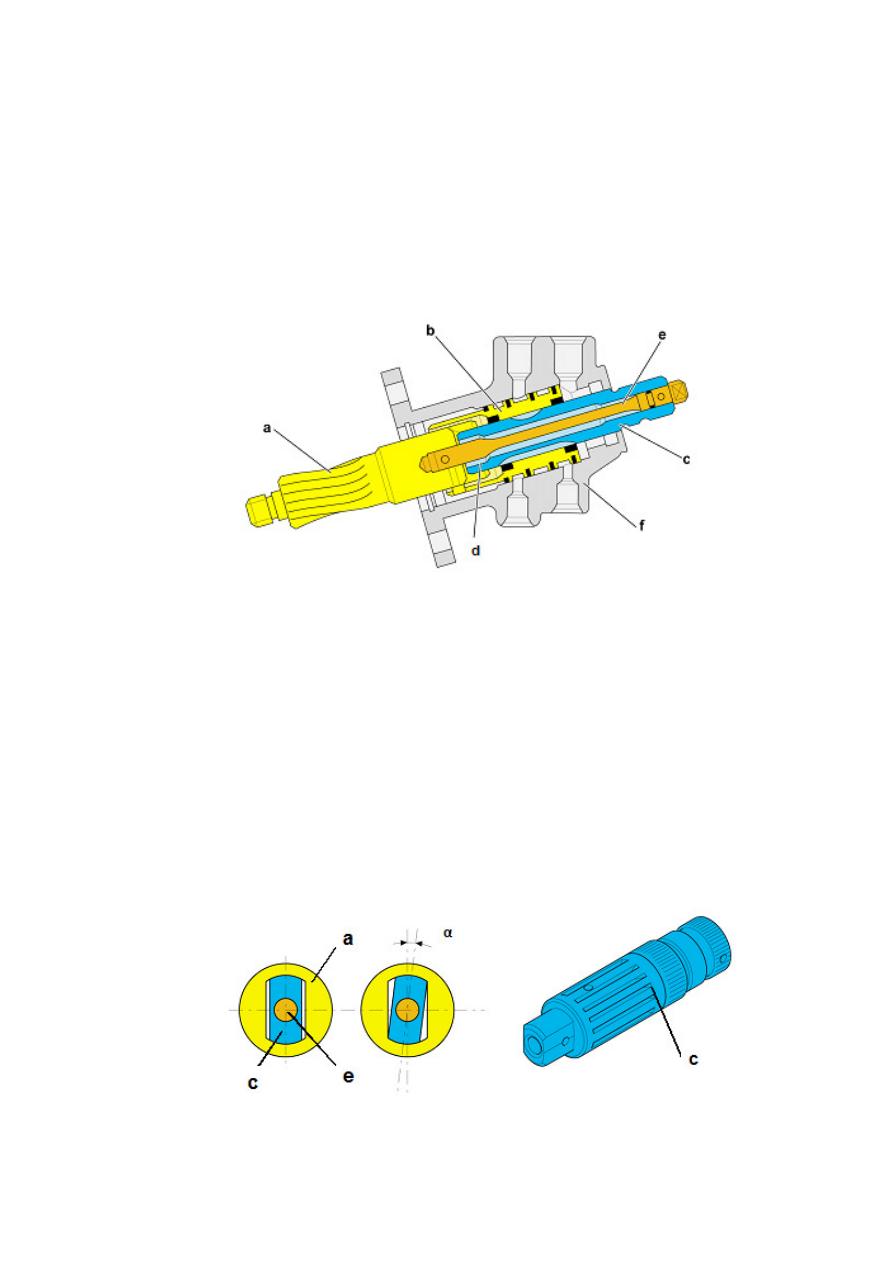
a – hammasratas, mis hambub hammaslatiga
b – jaotushülss, mis kinnitatakse alumise otsaga hammasratta a korpuse külge
c – rootor, mille alumine ots on vaba (stopperi sees), ülemise otsaga aga kinnitub
torsiooni e ülemise otsa külge
d – rootori stopper
e - torsioon
f – jaotusklapi korpus
Ohutuse tagamine:
Rootori alumine ots paikneb hammasratta a korpuse soones (stopperis) nii, et talle jääb
stopperis väikese pöördenurga võimalus. Kui mingil põhjusel peaks üles ütlema võimendi
hüdrosüsteem või purunema torsioon, siis pärast väikest pöördenurka α haakub rootor
hammasratta korpusega ja edasine rooli keeramine toimub mehaaniliselt: rootori ülemine
ots saab pöördemomendi roolivõllilt ning annab edasi hammasrattale a.
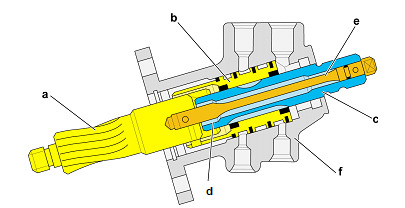
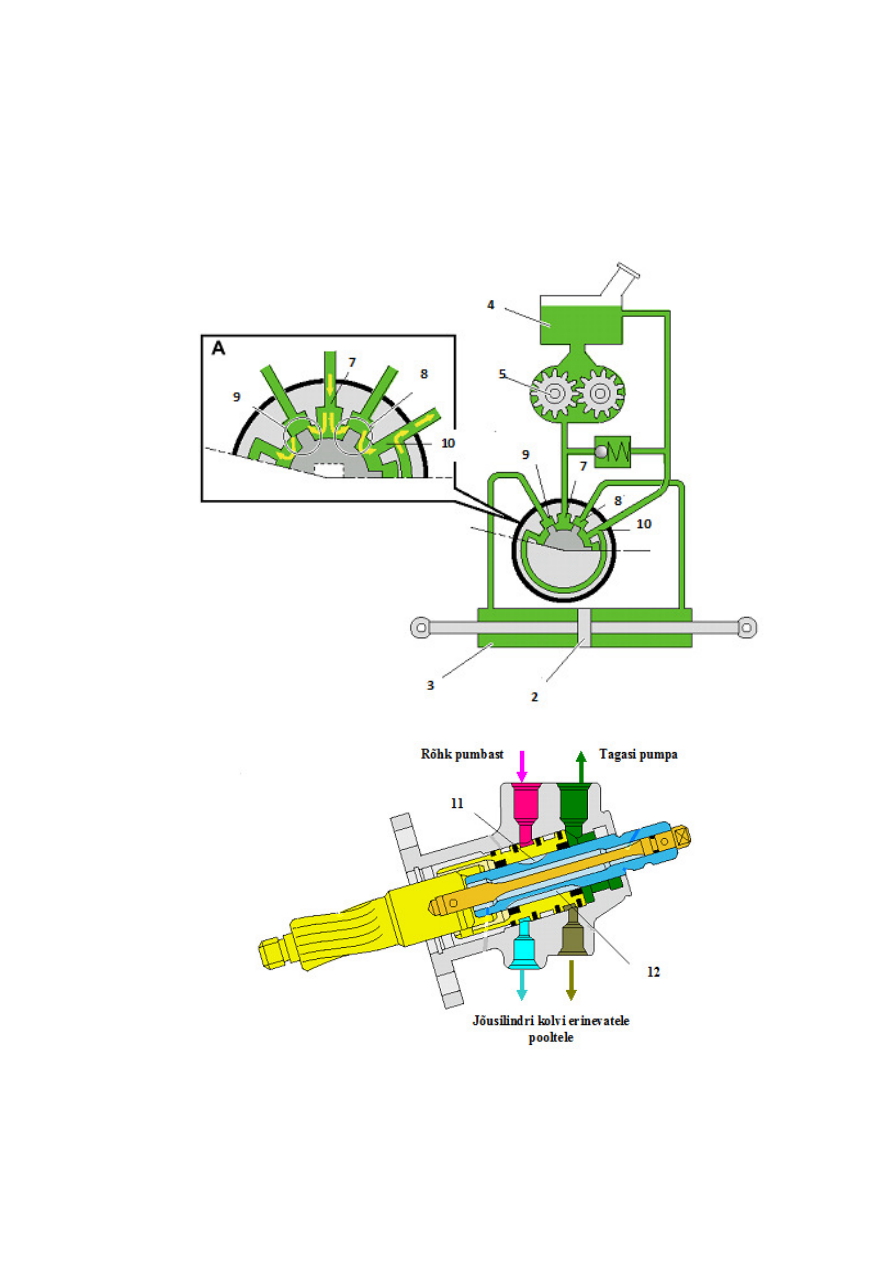
Tööpõhimõte:
Auto liikumisel otse (rooliratast ei pöörata) paiknevad rootori c sooned 11 ja 12 jaotushülsi
b radiaalkanalite 7, 8, 9 ja 10 suhtes sümmeetriliselt. Pumbalt 5 antav õlirõhk pääseb
jaotusklappi sisenevast kanalist 7 edasi kanalite 8 ja 9 kaudu mõlemale poole jõusilindri 3
kolbi. Sellega stabiliseeritakse kolvi 2 asend. Õli läheb tagasi pumpa kanali 10 kaudu.
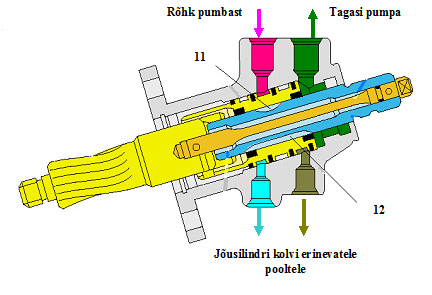
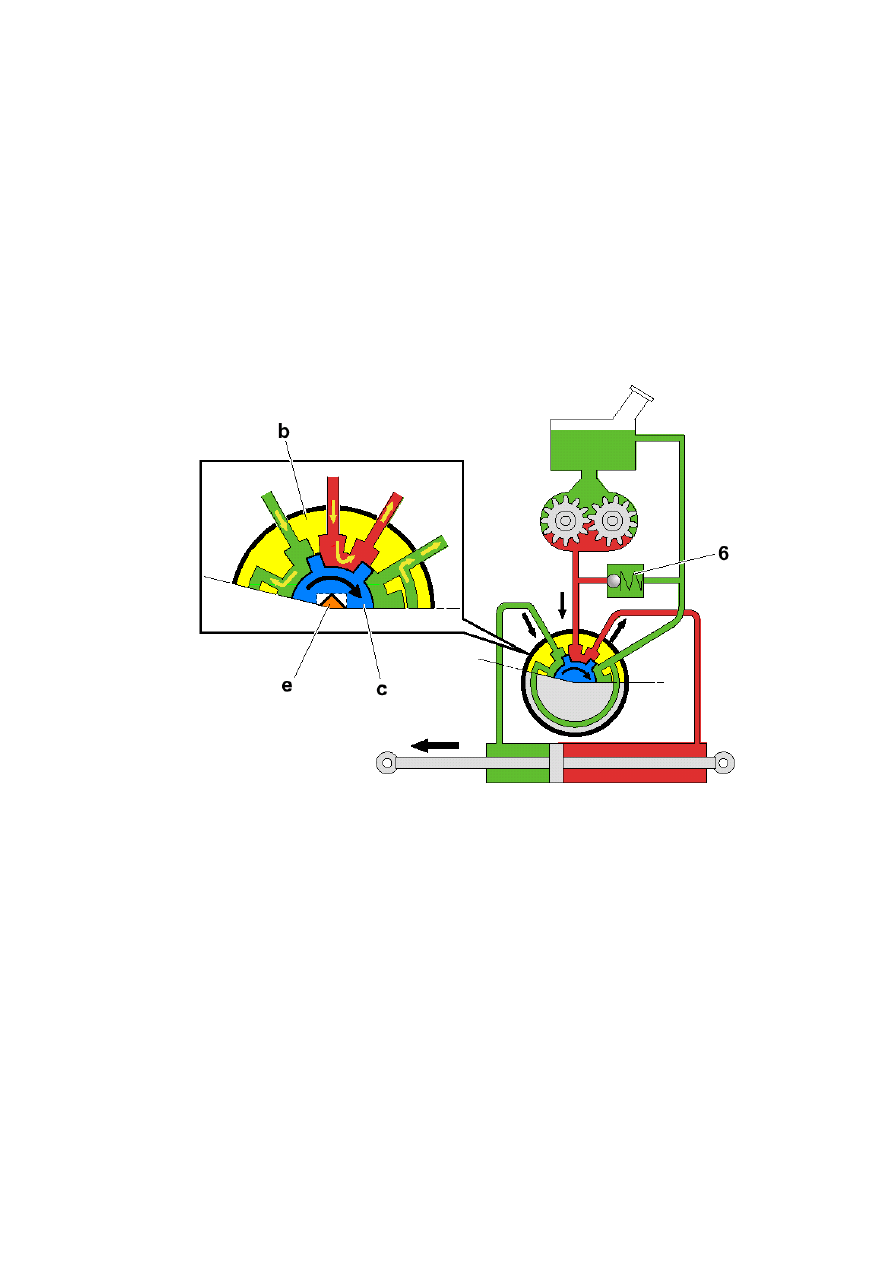
Rooliratta pööramisel antakse pöördemoment roolirattalt roolivõllile ja sealt edasi
torsioonile e. Kui auto rattad avaldavad pööramisele takistust, siis kõigepealt väändub
torsioon teatud nurga võrra ja seejärel pööratakse hammasratast a. Torsiooni väände tõttu
pöördub ta väikese nurga võrra rohkem, kui hammasratas. Koos torsiooniga pööratakse
keeramise suunas ettepoole ka rootor c.
Nagu teada, paikneb rootor c jaoturhülsi sees. See aga on oma alumise otsaga kinnitatud
hammasratta korpuse külge ja seetõttu pöördub jaoturhülss nagu hammasratas.
Lõpptulemusena keeratakse rootorit jaoturhülsi suhtes natuke ettepoole, mistõttu nihkuvad
üksteise suhtes ka kanalid jaoturhülsis ja rootoris. Sellest nihkumisest piisab, et ümber
lülitada õlirõhu edasiandmine ainult ühele poole kolbi ja vastavalt siis teiselt poolt kolbi õli
pumpa tagasi juhtida.
Mida suurem on takistus pööratavatel ratastel, seda rohkem väändub torsioon ning seda
rohkem avaneb õlirõhu kanal, juhtimaks õli jõusilindri kolvi taha. Taoliselt suurendatakse
võimendi poolt antavat lisajõudu. Maksimaalne õli läbivool tekib siis, kui torsioon väändub
nii palju, et rootori c alumise otsa lapik osa toetub vastu hammasratta a korpuse soont –
stopperit.
Rõhuklapp 6 avaneb rõhul 100 kuni 110 bar´i, sõltuvalt roolivõimendi tüübist.
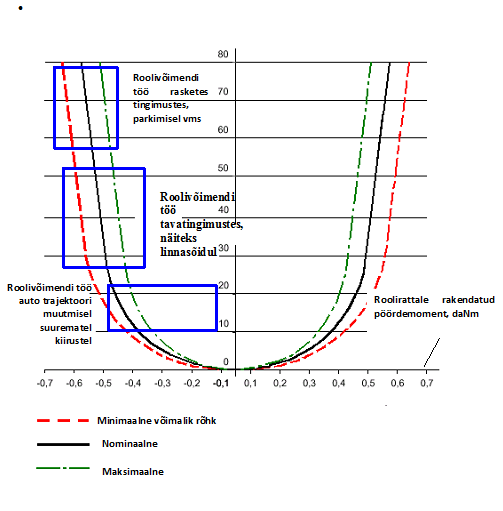
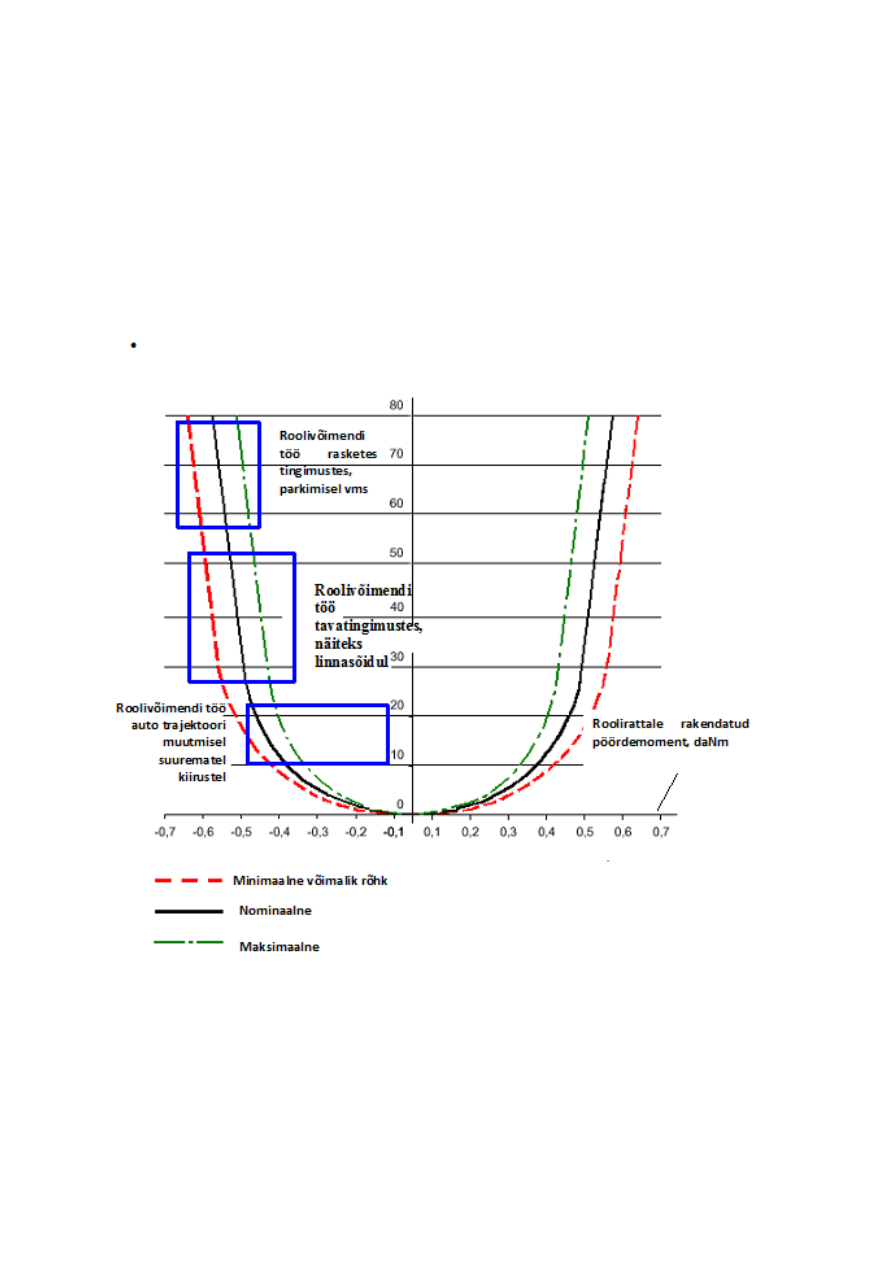
Jaotusklapi poolt jõusilindrile antava õlirõhu graafik, sõltuvalt roolirattale
rakendatavast pöördemomendist:
Graafik on välja toodud järgmistel tingimustel:
• Õlimark – TOTAL LSD
• Pumba tootlikkus – 2 l/min.
• Õli temperatuur - 45˚C
Jõusilindrile antav õlirõhk, bar´ides
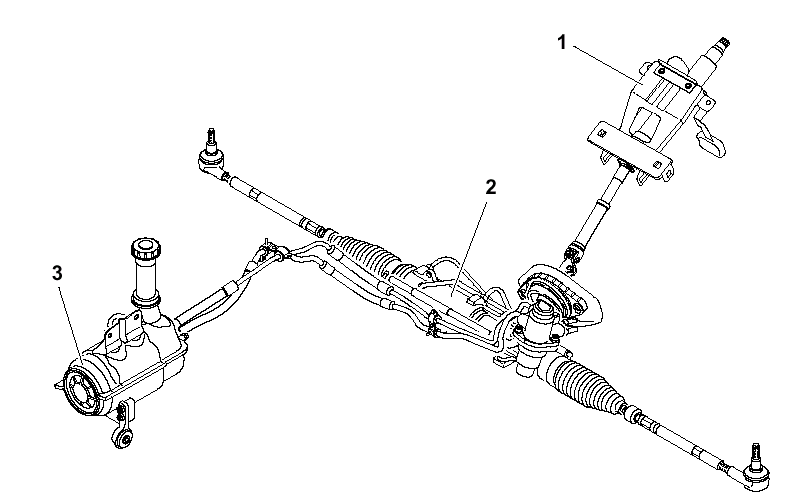
ELEKTROHÜDRAULILISE ROOLIVÕIMENDIGA ROOLISEADME KIRJELDUS
Mõned autod on varustatud elektrohüdraulilise roolivõimendiga, kus õlirõhk tekitatakse
elektrimootoriga käitatava hammasrataspumbaga. See on arvutijuhitav võimendi, milles
arvuti abil reguleeritakse jõusilindrile antavat õlirõhku sõltuvana auto liikumiskiirusest.
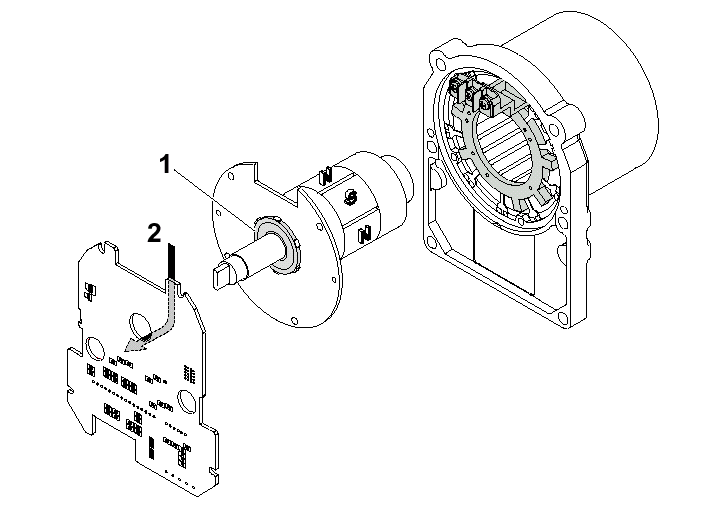
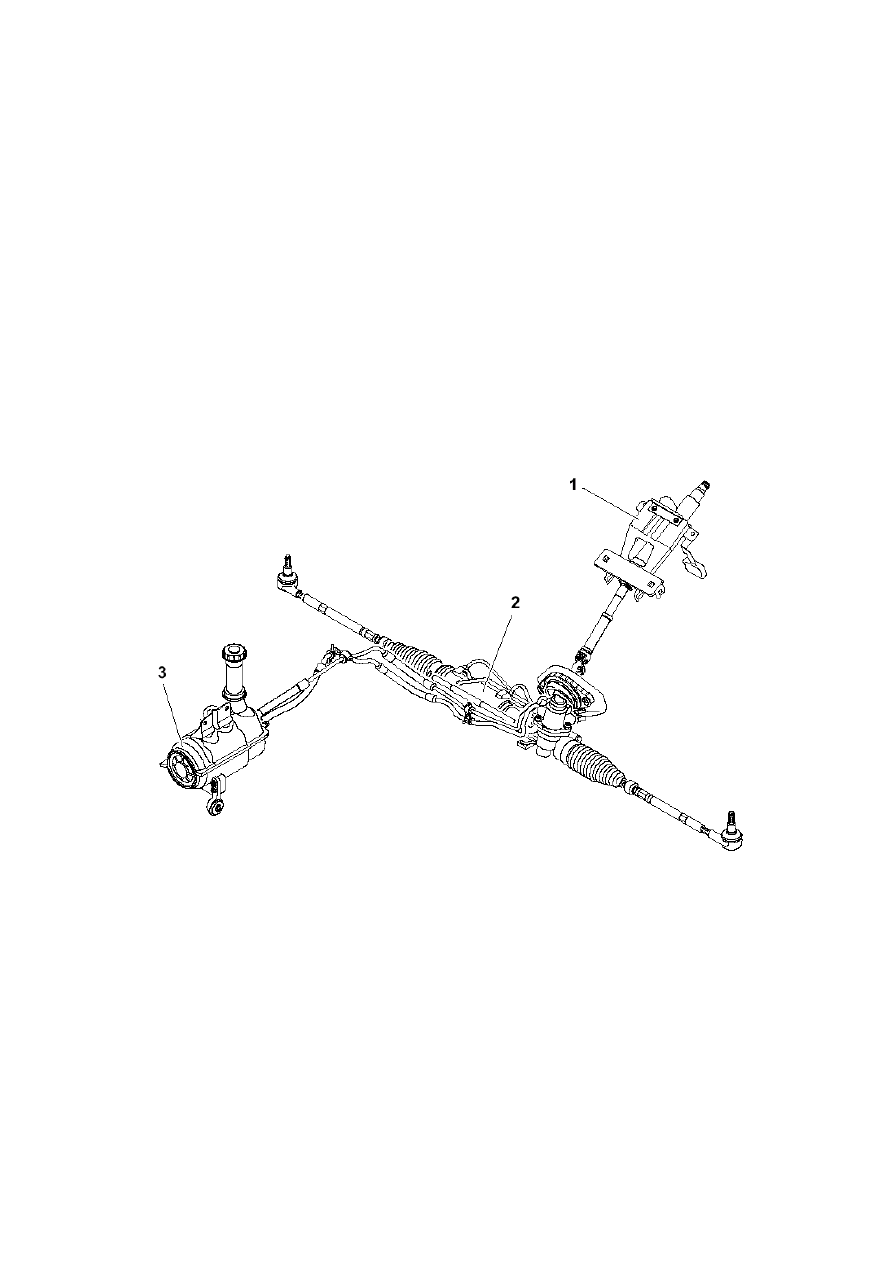
Rooliseade koosneb:
• Roolivõllist (1)
• roolimehhanism, kus on üheks tervikuks liidetud hammaslatt-ülekanne, jaotusklapp
ja jõusilinder (2)
• elektrilise ajamiga hammasrataspump (3)
• torustik ja voolikud
Elektrohüdraulilise ajamiga roolivõimendi pump ei ole enam ühendatud mootori väntvõlli
rihmarattaga, tänu millele väheneb kütusekulu 0,1 kuni 0,2 l/100km kohta.
Roolivõimendi võimendustegur sõltub auto liikumiskiirusest.
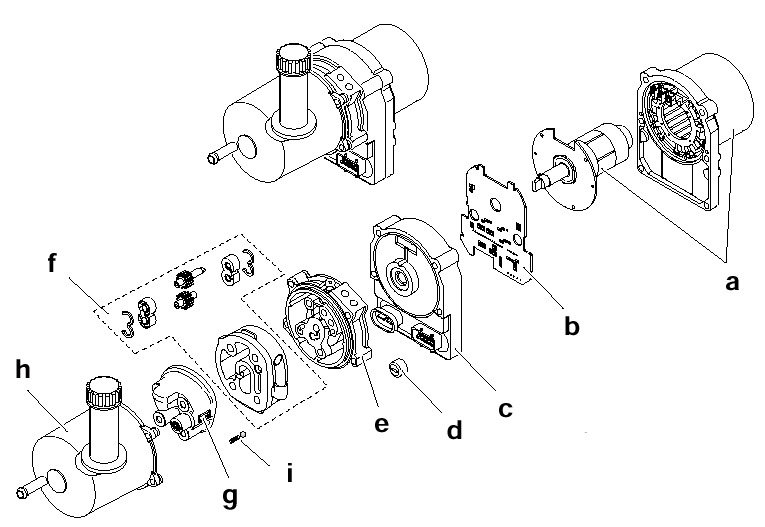
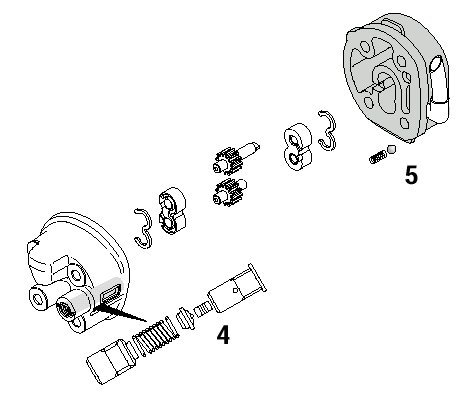
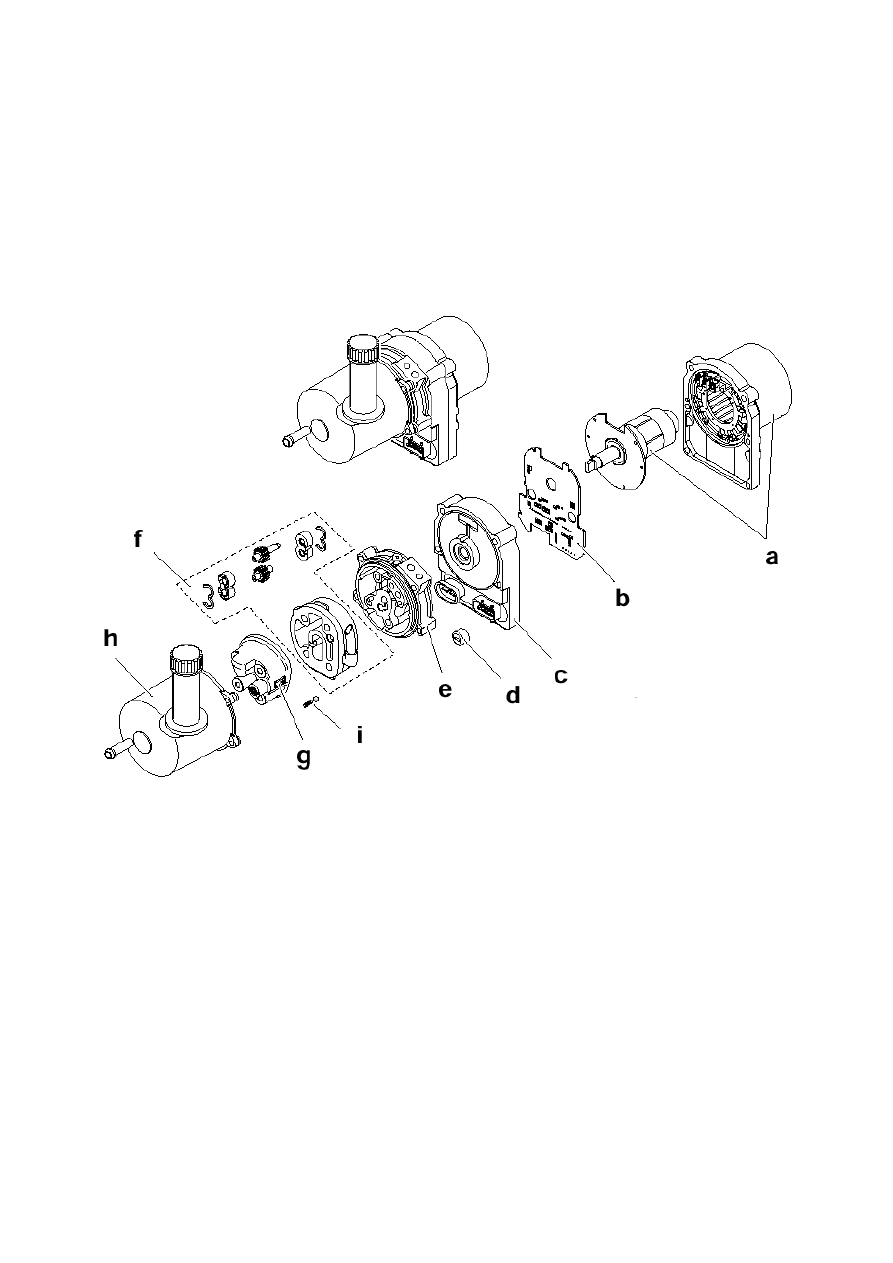
ELEKTROHÜDRAULILISE AJAMIGA ROOLIVÕIMENDI PUMP
a – elektrimootor, b – arvuti, c – elektriliste ühenduste plokk, d – vahepuks, e –
alumiiniumkorpus,
f – hammasrataspump, g – reduktsioonklapp, h – õlipaak, i - kaitseklapp
Toodetakse kahte varianti pumpasid:
-
Normaalvõimsusega – 600W, 100 bar´i
-
Suurendatud võimsusega – 700W, 110 bar´i
Peale selle võivad pumbad olla heliisolatsioonkattega või ilma.
Roolivõimendis kasutatav õli on TOTAL LSD H50126,
Süsteemi maht on 0,85 liitrit.
Roolivõimendi pumba tootlikkus sõltub nii auto kiirusest kui ka rooliratta pööramise
kiirusest.
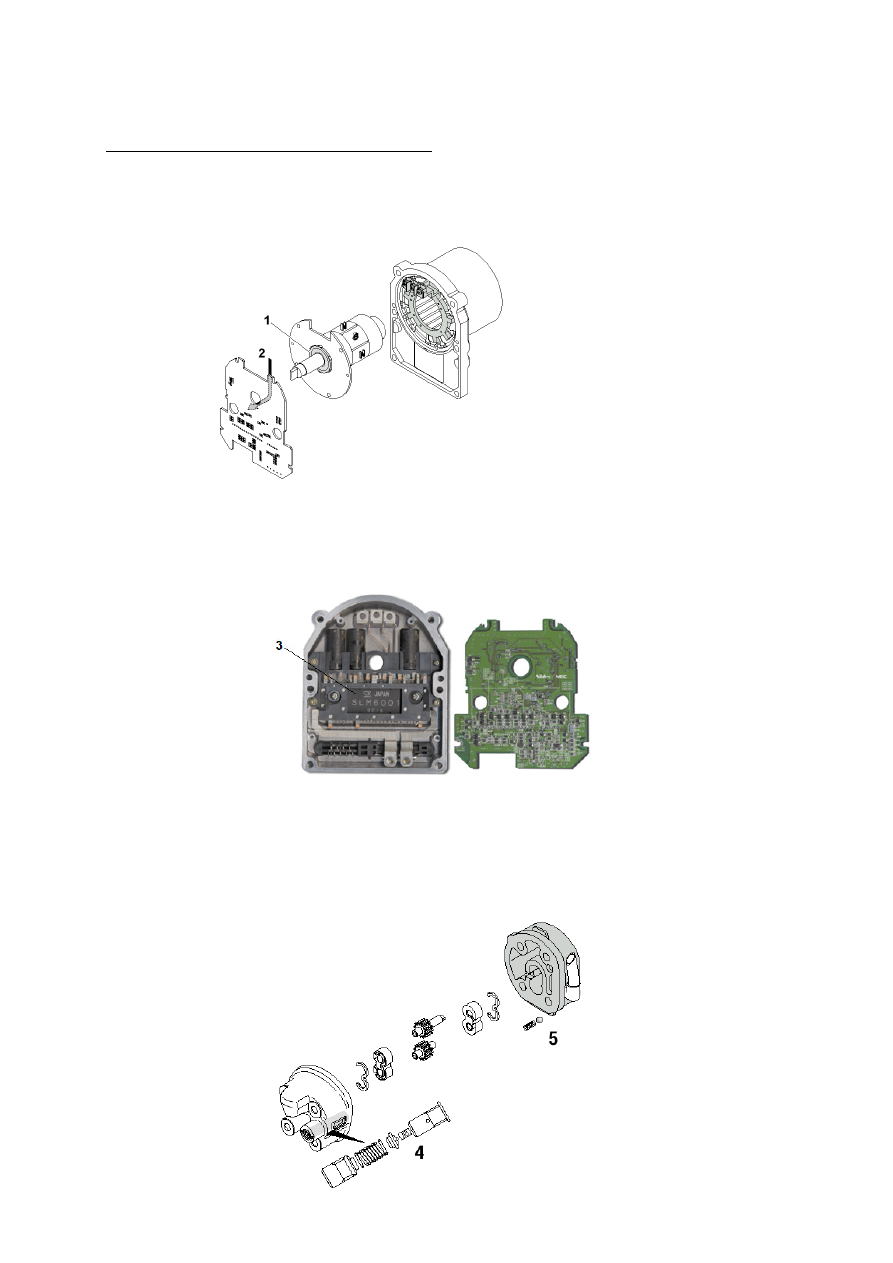
Roolivõimendi pumba komplekti kuuluvad:
• Kolmefaasiline, harjadeta ja astmelise reguleeringuga vahelduvvoolu elektrimootor.
Rootori pöörlemissagedus ulatub kuni 4900min-1. Rootori võllile on kinnitatud
pöörlemissageduse anduri (Halli anduri) 2 magnetketas 1.
• Elektriline juhtplokk, mis täidab ka enesediagnostika funktsioone. Plokki kuulub ka
temperatuuriandur 3, mis hindab pumba temperatuuri (täpsemalt - elektroonilise
juhtploki alumiiniumplaadi temperatuuri)
• Hammasrataspump, mis tekitab õlirõhku kuni 110 bar´i. Pumbas on
reduktsioonklapp 4, mis piirab maksimaalset rõhku kas 100 või 110 bar´i, sõltuvalt
pumba tüübist. Peale selle on veel kaitseklapp 5, mis laseb hüdrosüsteemis õlil
ühest osast teise edasi liikuda, kui pumba mingi osa on kinni kiilunud (selline rike
tooks kaasa kogu rooliseadme kinnikiilumise
• Elektriliste ühenduste plokk sisaldab omakorda:
- õlipaaki, õlikanaleid ja filtreid. Peugeot 307 autokoolide versioonil on
lisaks veel õli jahutusradiaator terastoru kujul.
-
kahekontaktiline pistikupesa +BAT ja massiühenduse jaoks
-
üheksakontaktiline pistikupesa mitmesuguste signaalide vastuvõtiuks ja
edasiandmiseks
ROOLIVÕIMENDI TÖÖTAMINE
Elektrilise ajamiga roolivõimendi pumba poolt jõusilindrile antav õlikogus sõltub nii
auto kiirusest kui ka rooliratta pööramise kiirusest:
QVÕIM = QAUTO + QROOL
Allpool toodud näidetes on aluseks võetud üks kindel autotüüp. Roolivõimendi arvutisse
on võimalik sisse installeerida erineva ja varustusastmega autode andmeid.
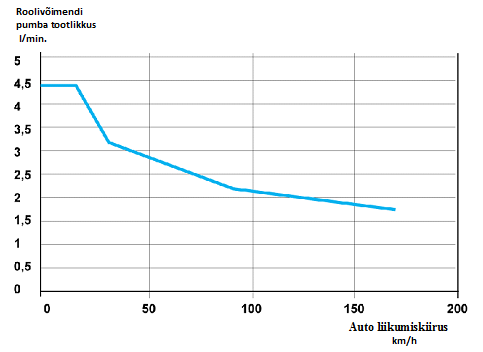
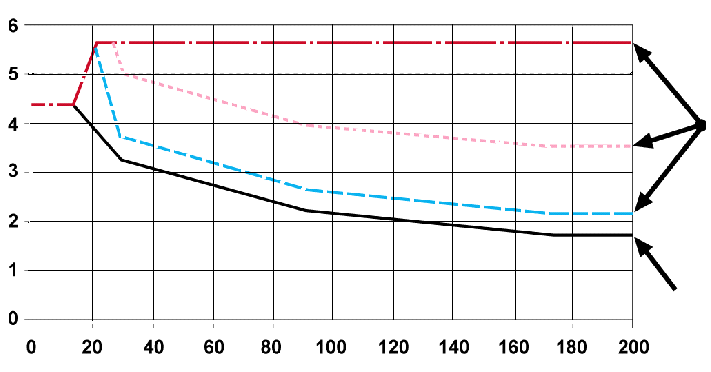
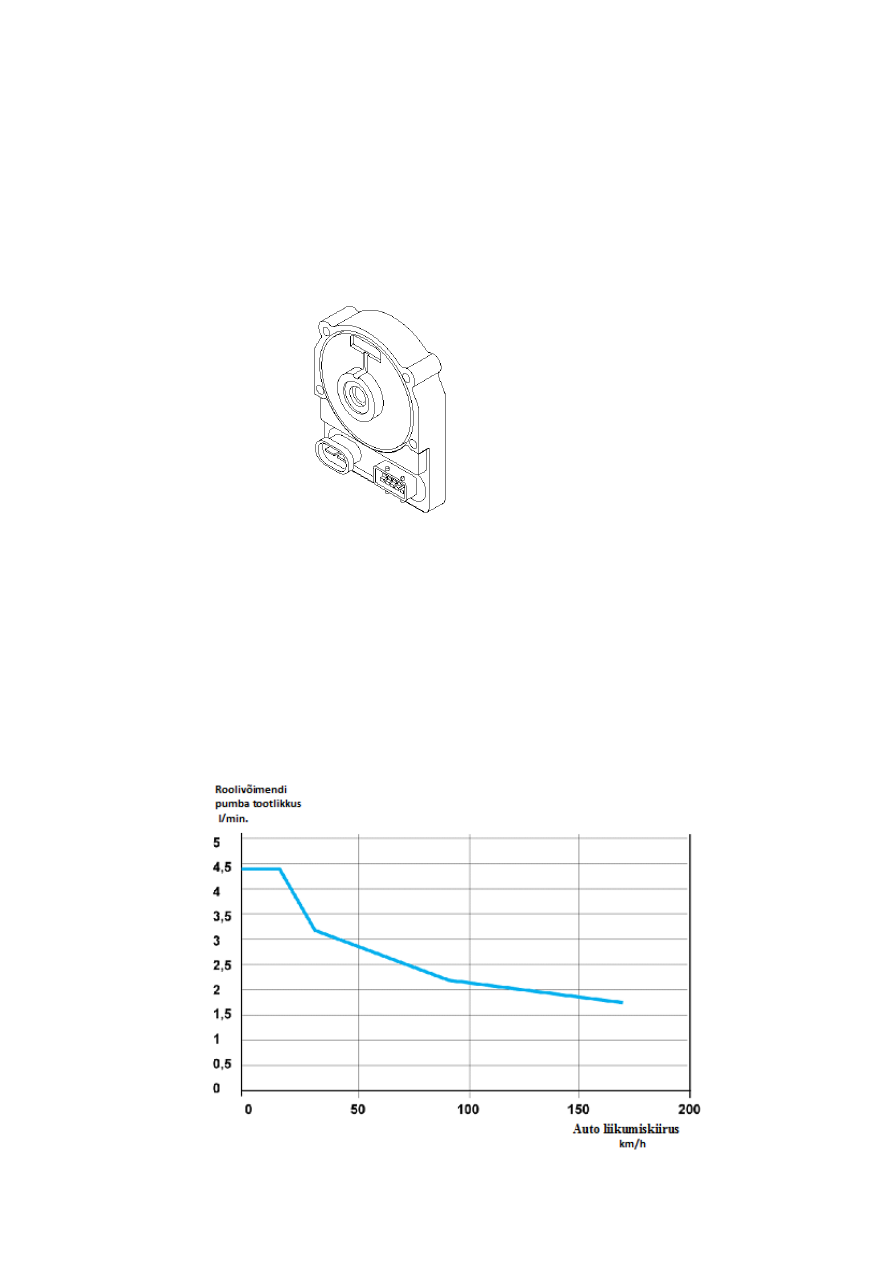
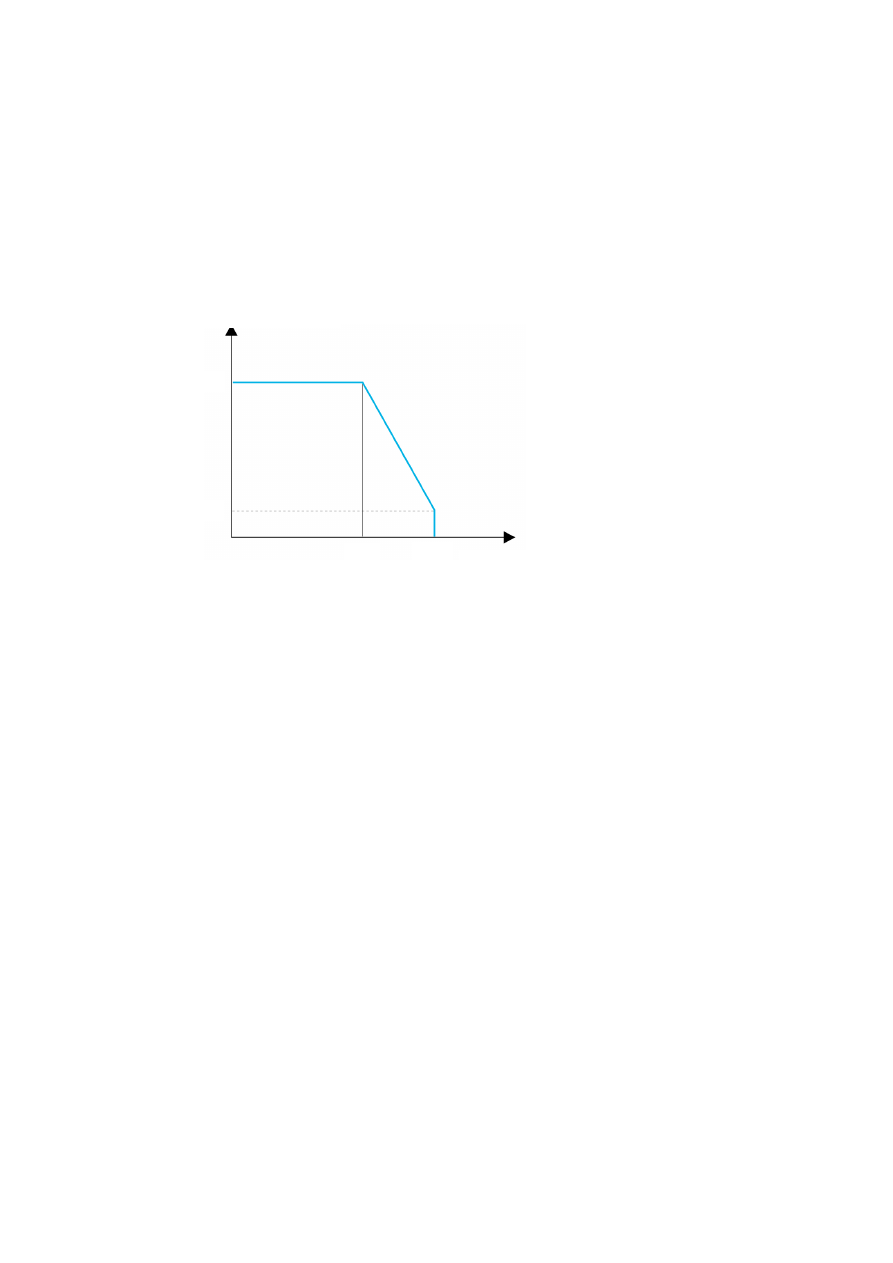
Roolivõimendi pumba tootlikkuse sõltuvus auto kiirusest ( QAUTO )
Võimendustegur väheneb auto kiiruse tõusuga.
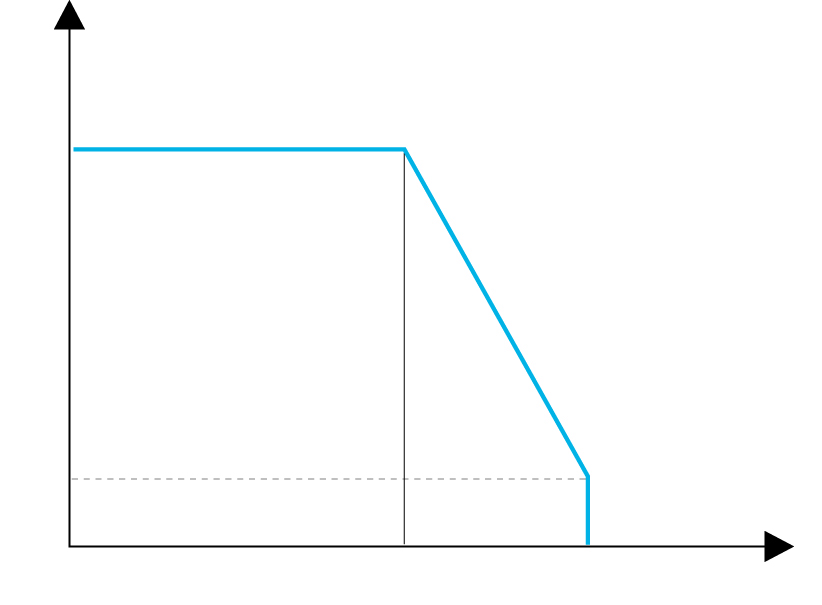
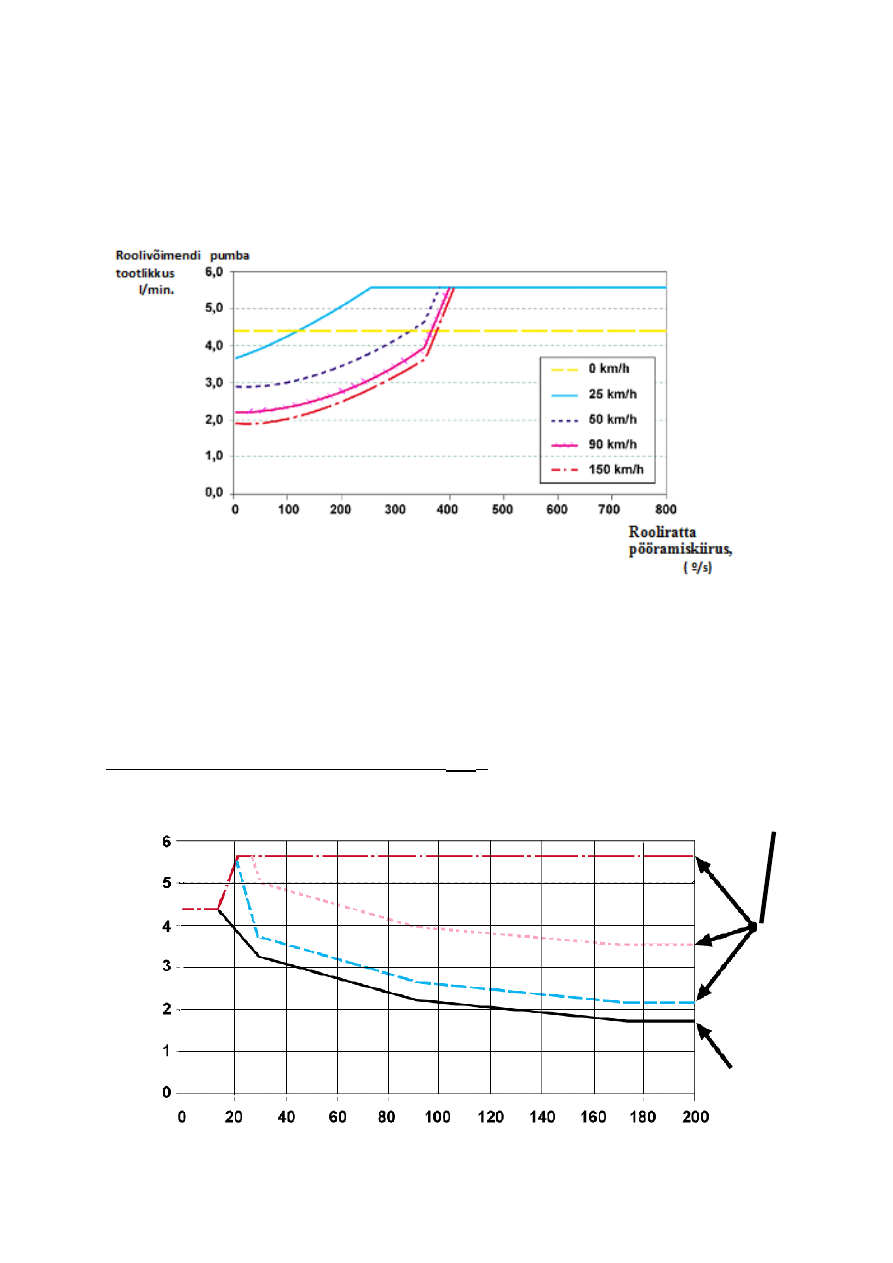
Roolivõimendi pumba tootlikkuse sõltuvus rooliratta pööramise kiirusest (QROOL):
Müra vähendamiseks auto parkimise ajal rooli keerates, hoitakse pumba hammasrataste
pöörlemissagedus püsivana umbes 3000 min-1 ja see ei muutu sõltuvana rooliratta
pööramiskiirusest.
• Jõusilindrile antavat maksimaalset õlikogust piirab õlipumba enese tootlikkus, antud
juhul 5,5 l/min.
• Rooliratta väiksematel pööramiskiirustel muutub õlipumba tootlikkus vähe.See loob
parema nn.”rooliratta tunnetuse”, sest rooliratta väiksemaid pööramiskiiruseid
kasutatakse auto suurematel kiirustel.
• Intnsiivsel manööverdamisel tootlikkus tõuseb järsult, kuid võimendustegur jääb
pumba nominaalväärtuse piiridesse.
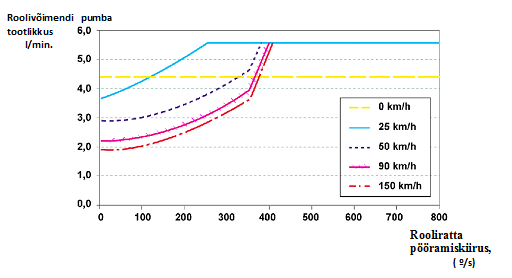
Roolivõimendi pumba kogutootlikkus (QVÕIM):
Roolivõimen
di pumba
tootlikkus
l/min.
Pumba tootlikkus sõltu-
valt rooliratta pööramis-
kiirusest QROOL
QAUTO
Auto kiirus km/h
Rooliratta pööramiskiirus – 1,5 p/s
Rooliratta pööramiskiirus – 1,0 p/s
Rooliratta pööramiskiirus – 0,5 p/s
Rooliratta pööramiskiirus – 0 p/s
Elektrimootori rootori pöörlemissageduse muutmine sõltuvalt temperatuurist.
Kui elektroonilise juhtploki temperatuur ületab 115ºC, hakkab arvuti järk-järgult
vähendama roolivõimendi pumba koormust, et vältida edasist kuumenemist. Jahtumisel
taastub endine töörežiim. Temperatuuril üle 130ºC lülitatakse pumba elektrimootor tööst
välja.
Elektrimootori rootori pöörlemissagedusel alla 600 min-1 muutub roolivõimendi
võimendusefekt praktiliselt märkamatuks.
Kütusekulu.
Võrreldes traditsiooniliste roolivõimenditega, kus pumba tootlikkus sõltub suures osas
mootori väntvõlli pöörlemissagedusest, võimaldab elektrilise ajamiga roolivõimendi pump
mootori kütusekulu vähenemist järgmistel põhjustel:
Traditsioonilised roolivõimendi pumbad on arvestatud suurele tootlikkusele, et saavutada
vajalik võimendus mootori väntvõlli väiksematel pöörlemissagedustel, tavaliselt
manööverdamisel parklas. Mootori väntvõlli suurematel pöörlemissagedustel aga jääb
suurem osa pumba tootlikkusest kasutamata ja tänu reduktsioonklapile läheb enamus
pumbast väljunud õli sissevoolu kanalisse tagasi. Elektrilise ajamiga roolivõimendi
pumpadel sellist probleemi ei ole, sest need töötavad ainult vajaduse korral ja elektrilise
ajamiga pumba tootlikkus on optimaalne igale töörežiimile eraldi:
• Auto manööverdamisel (parklas) suurendatakse pumba tootlikkust sõltuvana
rooliratta pööramise kiirusest.
• Auto liikumisel normaal- ja suurematel kiirustel on pumba tootlikkus sõltuvuses
auto liikumiskiirusest
Kokkuvõtteks on kindlaks tehtud, et elektrilise ajamiga roolivõimendi pumbaga varustatud
autode kütusekulu on 0,1 kuni 0,2 l/100 km kohta väiksem võrreldes nn traditsioonilise
roolivõimendiga.
EPU motor rotation speed in rpm
Temperature (°C)
5000
500
115
130
EPU motor rotation speed in rpm
Temperature (
5000
500
115
130
Elektrimootori rootori
pöörlemissagedus min
-1
Temperatuur Cº
ROOLIVÕIMENDI PÕHIMÕTTELINE SKEEM
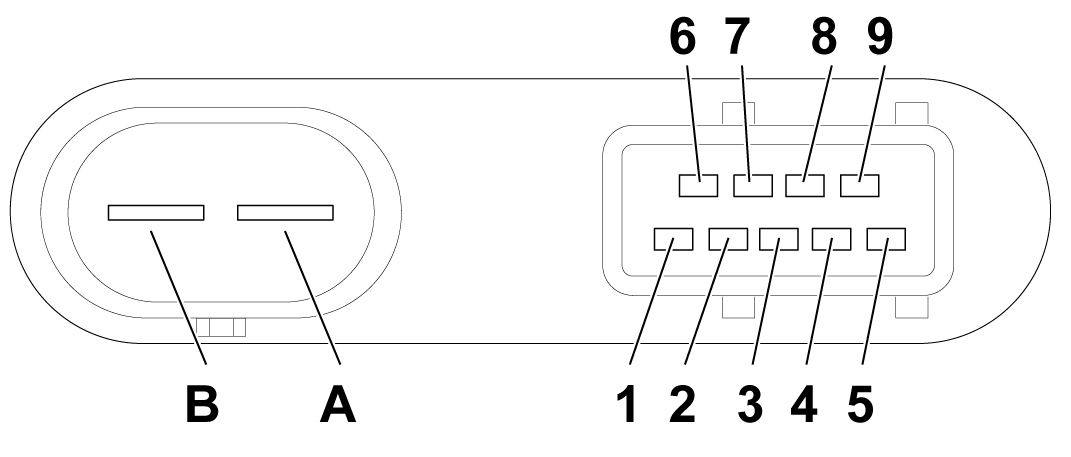
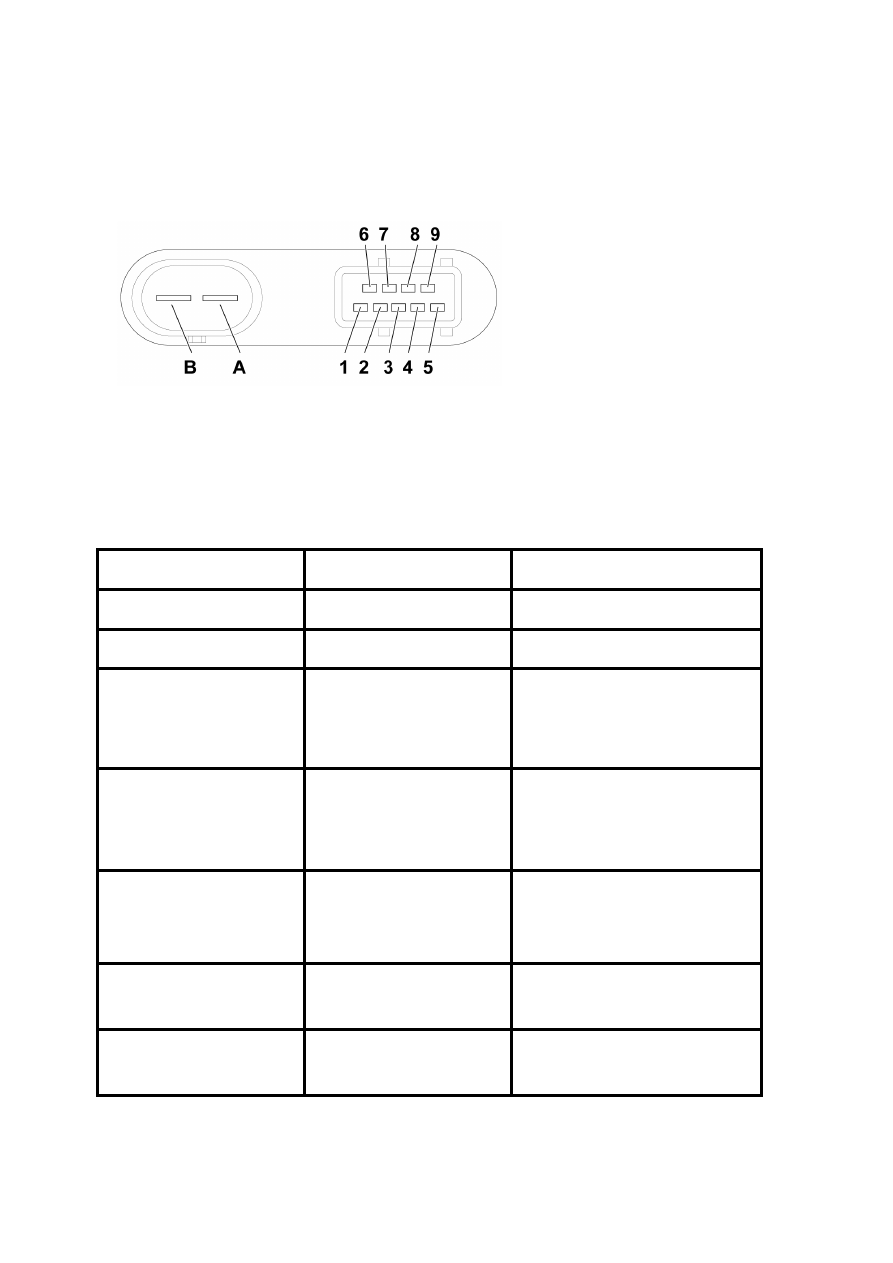
ROOLIVÕIMENDI ARVUTI ELEKTRILISED ÜHENDUSED
Signaali nimetus
Mõõtühik / signaali tüüp
Vajadus / määramine
Süüte sisselülitus
Volt
Pinge süüte sisselülitamisel
Aku +
Volt
Pidev pinge akult
S1
Perioodiline muutuva
sagedusega signaal
Signaal saadakse rooli pöördenurga
andurilt. Koostöös signaaliga S2
võimaldab see signaal määrata
rooliratta pööramise suunda ja
suurust täpsusega 1,5º
S2
Perioodiline muutuva
sagedusega signaal
(analoogiline S1)
Signaal saadakse rooli pöördenurga
andurilt. Koostöös signaaliga S2
võimaldab see signaal määrata
rooliratta pööramise suunda ja
suurust täpsusega 1,5º
Signaal mootori töötamise
kohta
Binaarne signaal (kas on või
ei ole pinget)
Annab infot mootori töötamise
kohta. Signaal tuleb generaatori D
klemmilt BSI ploki kaudu
Signaal auto kiiruse kohta
Perioodiline muutuva
sagedusega signaal
Signaal auto kiiruse kohta tuleb ABS
arvutilt
Diagnostikaliin
Digitaalne signaal numbrilisel
kujul
Võimaldab dialoogi rooliseadme
arvuti ja diagnostikaseadme vahel
A –
aku + klemmilt
B – massiühendus
1 – signaal rooli pöördenurga
andurilt (signaal S1)
2 – vaba kontakt
3 – diagnostikaliin (liin K)
4 - signaal auto kiiruse kohta
5 – signaal süüte sisselülimise
kohta
6 - signaal rooli pöördenurga
andurilt (signaal S2)
7 – vaba kontakt
8 – vaba kontakt
9 – signaal generaatorilt
mootori töötamise kohta
Rooliratta pöördenurga andurid.
Informatsioon rooli pöördenurga kohta on vajalik roolivõimendi pumba tootlikkuse
reguleerimiseks. Roolivõimendi arvutile antakse kaks perioodiliselt muutuva sagedusega
signaali (S1 ja S2). Nende abil määrab arvuti rooliratta pöördenurga ulatuse, kiiruse ja
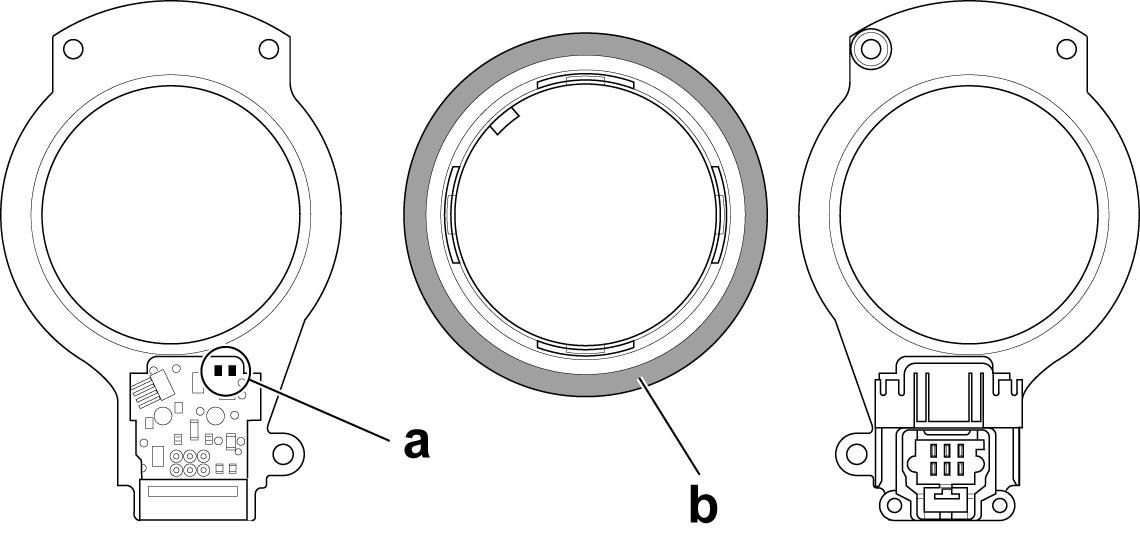
suuna. Signaalid tekitatakse pöördenurga anduris, mis paikneb rooli kommutaatorplokis
CV00. Sõltuvalt auto varustustasemest võib olla kahte tüüpi pöördenurga andureid:
1. Ainult ABS pidurisüsteemiga varustatud autode rooli pöördenurga andurid
2. Stabiilsuskontrolliga ESP varustatud autode rooli pöördenurga andurid
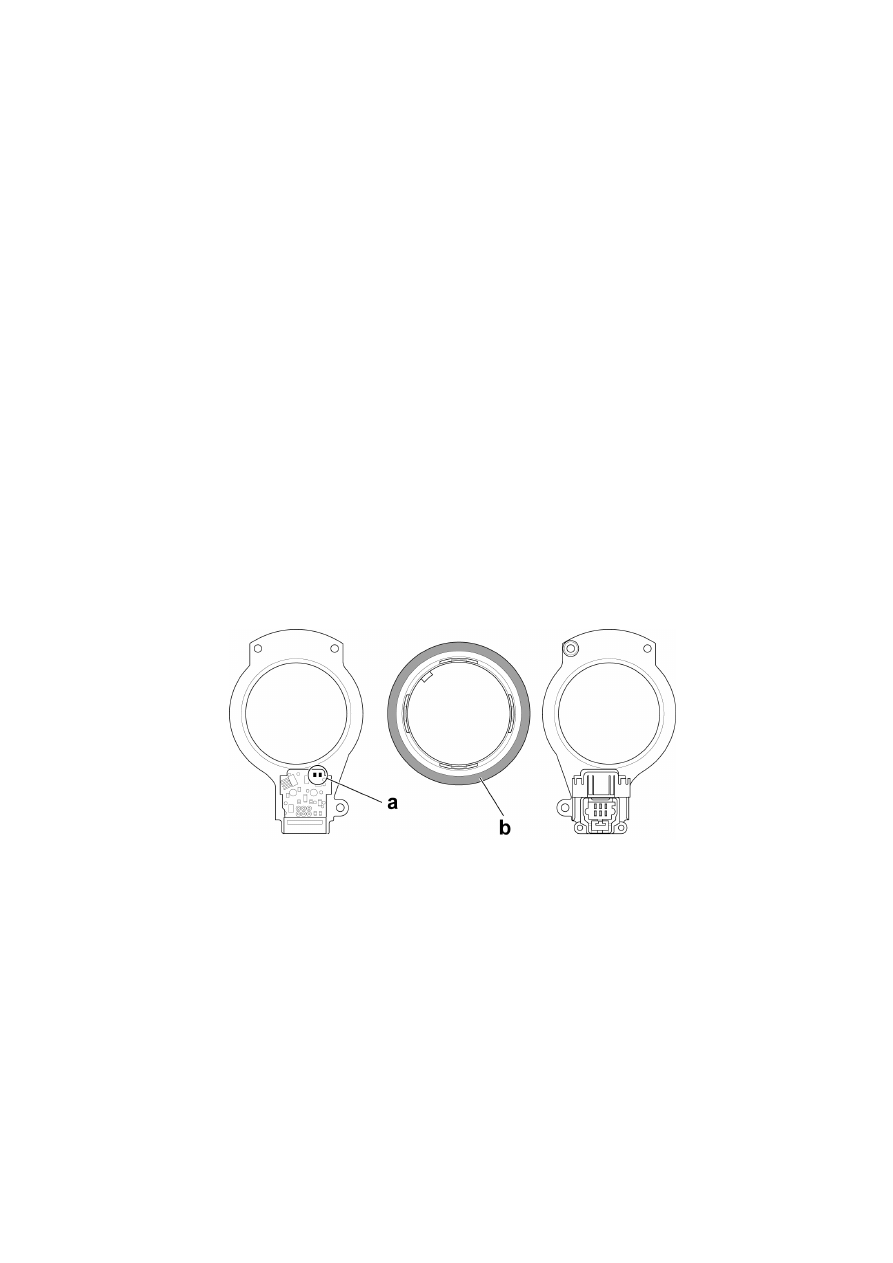
Ainult ABS pidurisüsteemiga varustatud autode rooli pöördenurga
andurid.
Rooli kommutaatorplokis paikneb Halli andur (a), mille ligiduses pöörleb koos roolirattaga
120 magnetpoolusega rõngas (b). Andur saab toite “AA” vooluahelast ja annab välja kaks
infosignaali S1 ja S2. Seetõttu on pistikul 6 klemmi.
Anduri mõõtepiirkond on -901º kuni + 901º
Anduri maksimaalne registreeritav rooliratta pööramiskiirus on kuni 2000º/s. Selline kiirus
võib tekkida löökide puhul, näiteks, kui auto sõidab esirattaga vastu kõnnitee äärekivi.
Anduri mõõtepiirkond rooliratta pööramiskiiruse registreerimisel on 0º kuni 1200º/s.
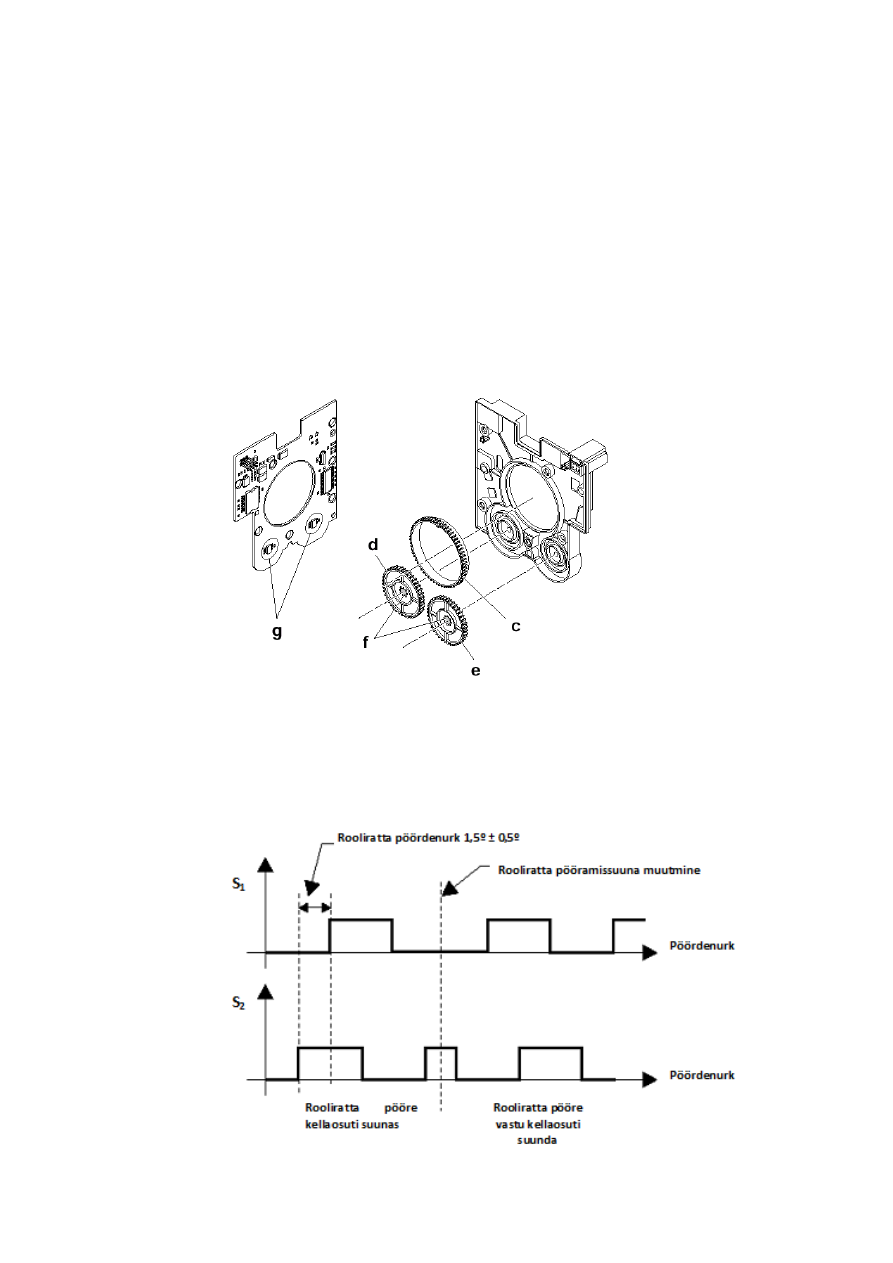
Stabiilsuskontrolliga ESP varustatud autode rooli pöördenurga
andurid.
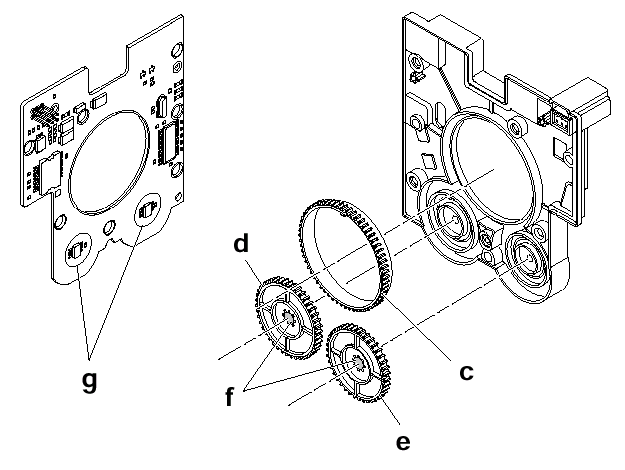
Stabiilsuskontrolliga autode pöördenurga andurid on magnetresistiivset tüüpi. Need
koosnevad andurite (g) vastas paiknevatest magnetitest (f). Magnetite pöörlemine tekitab
andurites vahelduva elektrilise signaali.
Roolivõllile on jäigalt kinnitatud hammasratas (c), mis on hambumises kahe
hammasrattaga (d) ja (e). Need hammasrattad on erinevate hammaste arvudega:
d – 42 hammast ja e – 39 hammast. Erinevate hammaste arvude tõttu pöörlevad
hammasrattad d ja e erinevate kiirustega, mistõttu on rooli pööramise igal ajahetkel
magnetid f teineteise suhtes erinevates asendites. Tänu sellele saab igal hetkel täpselt
määrata rooliratta asendi.
Andur saab toite “AA” vooluahelast. CAN võrgustiku harude “CAN H” ja “CAN L” kaudu
antakse edasi signaalid ESP (stabiilsuskontrolli) juhtimiseks ja veel kahe juhrme kaudu
antakse signaalid S1 ja S2 roolivõimendi pumba arvutile.
Tähelepanu! Pärast rooliseadme või esisilla remonttöid tuleb tingimata kalibreerida
rooliratas, seades esirattad eelnevalt otseasendisse.
Anduri mõõtepiirkond on -780º kuni +780º
Anduri maksimaalne registreeritav rooliratta pööramiskiirus on kuni 2000º/s. Selline kiirus
võib tekkida löökide puhul, näiteks, kui auto sõidab esirattaga vastu kõnnitee äärekivi.
Anduri mõõtepiirkond rooliratta pööramiskiiruse registreerimisel on -1016º/s kuni +1016º/s.
Signaalide S1 ja S2 iseloomustus
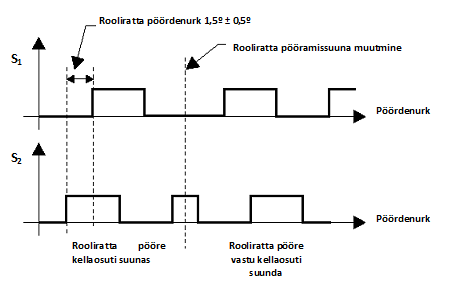
Signaalidel S1 ja S2 on täisnurk-impulss graafikud, mis on elektriliselt teineteise suhtes
nihutatud 90º ± 30º.
Iga üleminek süsteemi uuele loogilisele tasemele (kas 0 või 1), mis toimub ükskõik kumma
signaali tasemel, vastab 1,5º rooliratta pöördenurgale.
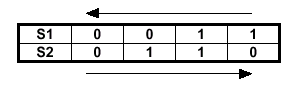
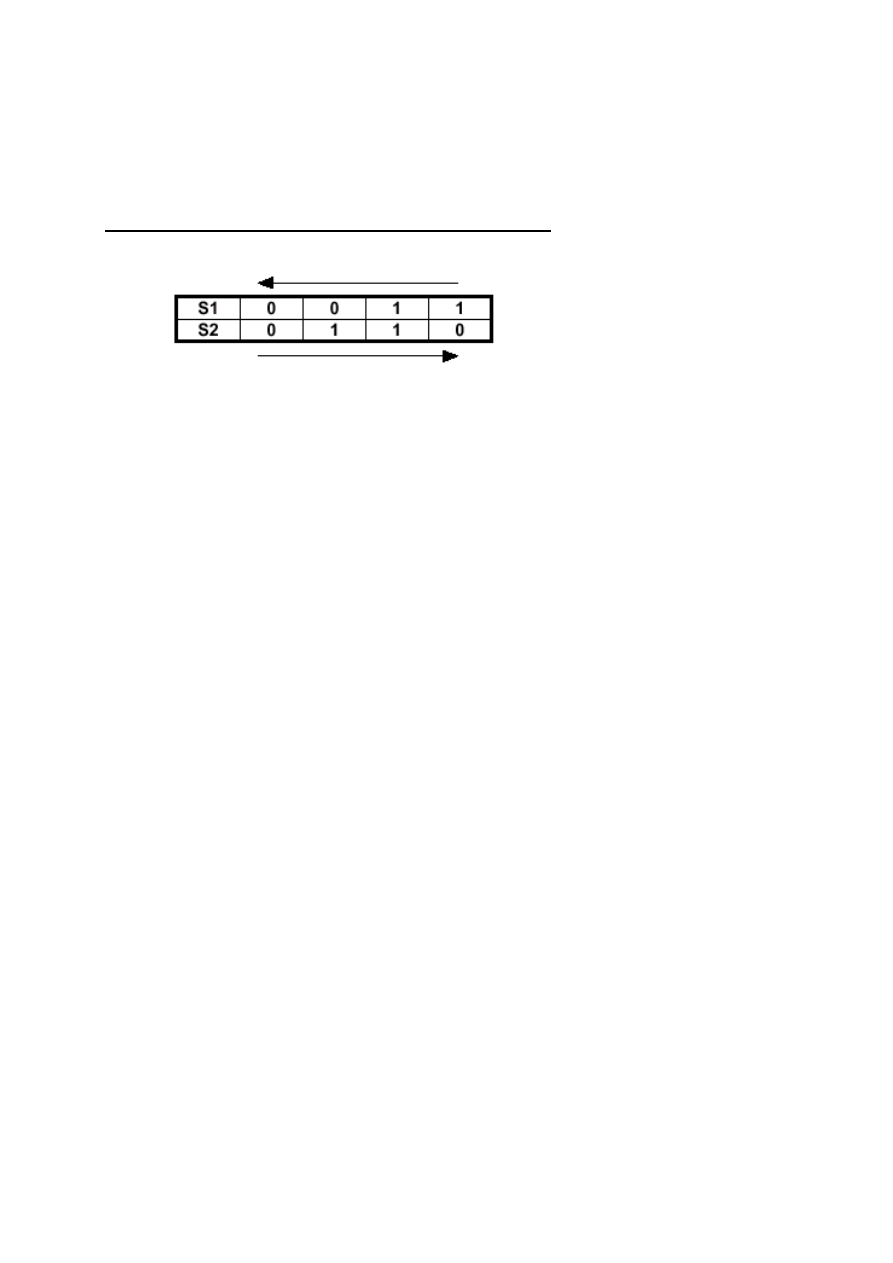
Süsteemi loogilised tasemed ülaltoodud graafikute alusel:
Informatsioon mootori töötamise kohta.
Informatsioon mootori töötamise kohta tuleb generaatorilt juhtplokki BM34 ja sealt auto
keskarvutisse BSI ning jõuab roolivõimendi arvutisse. Signaal ise on lihtne: mootori
töötamise ajal on pinge 12volti ja mittetöötaval mootoril 0 volti.
Roolivõimendi rikke otsimisel tuleks alustada just selle signaali kontrollimisega.
Samas aga tuleb teada, et roolivõimendi pumba elektrimootor töötab järgmistel
tingimustel:
1.Mootori töötamise ajal pööratakse rooli, kuid auto ise ei pea liikuma
2.Mootor ei tööta, kuid auto liigub (pukseeritakse) ja süüde on sisse lülitatud, et
töötaks auto kiiruse andurid.
Informatsioon auto liikumise kohta.
Nagu ülaltoodust selgus, on auto kiiruse anduritel suur tähtsus võimendi elektrimootori
töötamise jaoks. Seda signaali kasutatakse pumba tootlikkuse reguleerimiseks. Signaal
saadakse auto rattalaagritesse ehitatud magnettakistuslikelt anduritelt, kust signaal ratta
pöörlemissageduse (auto kiiruse) kohta antakse ABS juhtplokile ning sealt BSI ploki kaudu
roolivõimendi juhtplokile.
Rooliratta pööre vastu kellaosuti suunda
Rooliratta pööre kellaosuti suunas
VÕIMALIKUD RIKKED
RIKE
PÕHJUSED
TÖÖREŽIIM
TUNNUS
Auto kiiruse signaal
vale
Anduri juhtme lühis või
juhtme katkestus
Võimendi arvuti võtab
kiiruse signaaliks 85
km/h*
Roolivõimendi
töötab
režiimis, nagu auto liiguks
kiirusga 85 km/h
Rooliratta
pöördenurga anduri
signaal vale
Signaalide S1 ja S2
vooluahelate lühistumine
“massi” või 12V pinge
alla
10 s. jooksul võtab
arvuti rooliratta
pööramise kiiruseks
248º/s*
Roolivõimendi
töötab
režiimis, nagu rooliratast
keerataks 248º/s
Puudub süüteluku
signaal
Katkestus on toimunud
auto liikumise ajal.
NB! Kui see vooluring
lühistub “massi” enne
mootori käivitamist, siis
roolivõimendi pump
tööle ei hakka.
Võimendi arvuti
kasutab aku vooluringi
“BB”. Kui mootor ei
tööta või kui auto ei
liigu, siis võimendi
pump seiskub.
Roolivõimendi
töötamise
ajal
mingeid
erilisi
tunnuseid ei ole.
Roolivõimendi
pumba
elektrimootor on
kinni kiilunud
Rootori võll ei pöörle
Võimendi arvuti
katkestab
elektrimootori
elektrienergiaga
varustamise
Rooliseade töötab ilma
võimenduseta
Roolivõimendi
pumba
ülekuumenemine
Temperatuur on üle
115ºC
Elektrimootori rootori
pöörlemissagedust
piiratakse vastavalt
vajadusele
Roolivõimendi töö ei vasta
vajadustele.
Tº>130ºC võimendi enam
ei tööta
Vale pinge
elektrimootori
klemmidel
Pinge on väiksem või
võrdne 7,5V
Võimendi arvuti
katkestab
elektrimootori
elektrienergiaga
varustamise
Rooliseade töötab ilma
võimenduseta
Viga mootori arvuti
mälus
Arvuti andmete
enesekontrollis selgub
kolm või enam erinevust
sisestatud ja mälus
olevate andmete vahel
Kolme või enama
erinevuse puhul
võimendi arvuti
katkestab
elektrimootori
elektrienergiaga
varustamise
Rooliseade
töötab
ilma
võimenduseta
Sisemine lühis
elektrimootoris või
tema juhtplokis
Suurenenud vool:
I ≥ 195 ± 12A (NP)**
I ≥ 234 ± 12A(HP)**
Võimendi arvuti
katkestab
elektrimootori
elektrienergiaga
varustamise
Rooliseade töötab ilma
võimenduseta
Parameetrid
sisestamata või on
seda valesti tehtud
Parameetrid sisestamata
või on seda valesti tehtud
Roolivõimendi
juhtimine
ebaadekvaatne
Roolivõimendi töö ei
kohane tegelike
tingimustega
* Need väärtused võivad muutuda
** NP – normaalvõimsusega roolivõimendi pumpadele;
HP – suurendatud võimsusega pumpadele.
ETTEVAATUSABINÕUD
Elektrohüdraulilise ajamiga roolivõimendi töö iseärasused
Elektrohüdraulilise ajamiga roolivõimendi saab töötada ka siis, kui auto mootor on
seiskunud. Sellisel juhul tuleb sisse lülitada süüde ja liigutada autot (näiteks pukseerida),
et võimendi arvutisse saabuks signaal auto liikumise kohta. Tuleb aga arvestada sellega,
et võimendi elektrivoolu tarvidus on küllalt suur ja aku võib kiiresti tühjeneda.
Rikete puhul käitub auto nii, nagu on näidatud eelpool toodud tabelis.
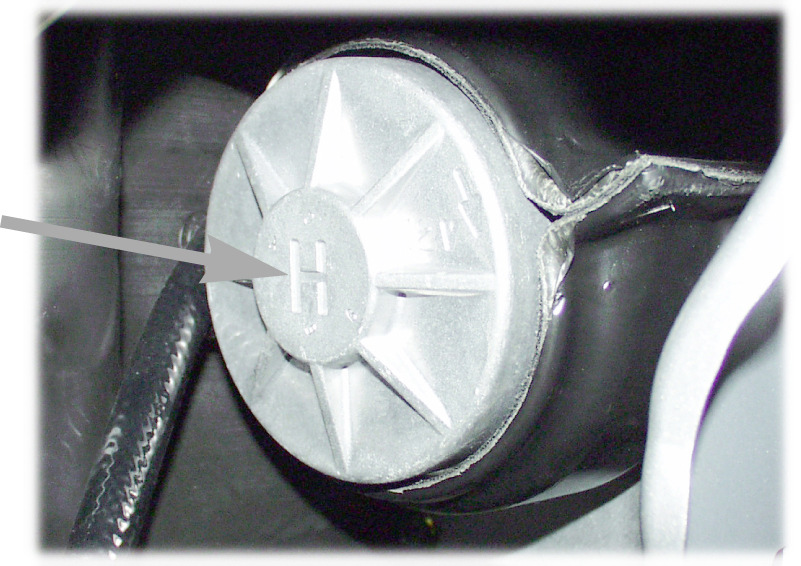
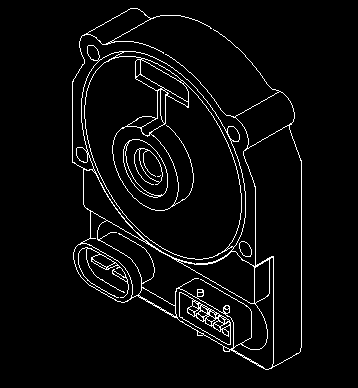
Roolivõimendi pumba identifitseerimine:
• Suurendatud võimsusega pumpadel on otsakaanel täht “H” (High Power)
• Normaalvõimsusega pumpade otsakaaned on puhtad.
Ettevaatusabinõud hooldusel ja remondil
Hooldus- ja remonditööde kvaliteedist sõltub nii roolivõimendi, kui ka kogu rooliseadme
töökindlus. Erilist tähelepanu tuleb pöörata tööde teostamise puhtusele, sest mustuse
sattumine võimendi hüdrosüsteemi võib:
• kiirendada kulumist koostöötavate pindade vahel,
• tekitada koostöötavate detailide kinnikiilumist,
• viia roolivõimendi pumba detailide purunemiseni,
• tekitada hüdrosüsteemi lekkimisi,
• vähendada võimendustegurit.
Selleks, et tagada hooldus- ja remonditööde kõrge kvaliteet, tuleb:
• kasutada hüdrosüsteemi täitmisel ainult uut, valmistajatehase poolt ettenähtud õli,
• vahetult pärast lahtiühendamist paigaldada kaitsekorgid klappide, kanalite ja torude
avadele,
• jälgida rangelt hooldus- ja remonditöödeks ettenähtud juhiseid,
• teostada töid ainult eelnevalt korrastatud ja puhastatud kohas,
• kasutada ainult korralike tööpindadega tööriistasid, et mitte kahjustada
kokkupuutepindasid,
• mitte kasutada puhastamiseks suruõhku.
Koostas:
Valter Kokkota
Autokutseõppe Liit
High Power
High Pow
Sarnased õppematerjalid
![Veermik ja juhtimisseadmed]()
19
doc
Veermik ja juhtimisseadmed
Veermik on auto alusvanker. Kui on raam. Või on vedrude abil kinnitatud kere külge .
Veermik.Veermik peab tagama sujuva ja stabiilse liikumise.
Veermik koosneb: esi ja tagasillast, vedrudest, amortisaatoritest, ja ratastest.
Suurtel sõiduautodel ja Jeepidel on alusvanker.
Alusvanker koosneb raamist,vedrudest,sildadest ja ratastest.
Kande kerega sõiduautodel kinnitub esisilla tala jäigalt kere külge. Ehk poolraami külge.
Ja rattad vedrude abil kere külge.
Vedrustus.
Esitellikute ja tagasilla vedrustuse hulka kuuluvad: vetruvad,suunavad,summutavad osad.
Vetruvad elemendid on (poolelliptilised) lehtvedru,keerdvedrud,vasak,parem,koonus,.
Väändvedrud(torssioonvedrud). Balansiirvedrud. Õhkpadjad.
Vedrud leevendavad auto sõidu ajal teepinna ebatasasuste tõukeid ja tagavad sujuva
liikumise.
Suunavad elemendid määravad end rataste õõtsumise käigus paika ja võtavad vastu auto
piki ja külgsuunas mõjuvaid jõude.
Autoreaktiiv momente võtavad vastu, reaktiivvardad. Põikstab
![LABORATÖÖRNE TÖÖ-ALUSVANKER]()
54
doc
LABORATÖÖRNE TÖÖ, ALUSVANKER
Richard Karming, Are Enok, Ayron Alliksaar
LABORATOORSED TÖÖD
ARUANNE
Õppeaines: KERE JA ALUSVANKER
Transporditeaduskond
Õpperühm: KAT-41
Juhendaja: lektor Margus Villau
Esitamiskuupäev: ...................................
Üliõpilase allkiri: ...................................
Õppejõu allkiri: ......................................
Tallinn: 2016
�SISUKORD
SISSEJUHATUS........................................................................................................................3
1. VEDRUSTUS JA ROOLISÜSTEEM....................................................................................4
2. ROOLISÜSTEEM JA ROOLIVÕIMENDI.........................................................................13
3. PIDURISÜSTEEM.........................................................................................................
![ROOLIMEHHANISMID]()
10
doc
ROOLIMEHHANISMID
TALLINNA TEHNIKAKÕRGKOOL
TALLINN COLLEGE OF ENGINEERING
REFERAAT
ROOLIMEHHANISMID
Õppeaines: KERE JA ALUSVANKER
Transporditeaduskond
Õpperühm: AT-31
Üliõpilane:
Kontrollis: J. Luppin
Tallinn 2006
� Sisukord
TALLINN COLLEGE OF ENGINEERING......................................................................................................2
Sisukord....................................................................................................................................................................3
Roolisüsteemi otstarve.............................................................................................................................................4
Rooliratas..................................................................................................................................................................4
![Juhtimisseadmed ja veermik]()
15
docx
Juhtimisseadmed ja veermik
Põltsamaa Ametikool
Juhtimisseadmed ja veermik
A2
Nimi
Sisukord
1. Autovedrustus............................................................................................... 3
1.1 Keerdvedrustus..................................................................................................................3
1.2 Lehtvedrustus...............................................................................
![Juhtimisseadmed ja vedrustus]()
16
docx
Juhtimisseadmed ja vedrustus
Põltsamaa Ametikool
Juhtimisseadmed &
Vedrustus
A2
Alvar Müür
Kaarlimõisa 2009
� 1.Vedrustus
1.1 Vedrustuste tüübid vastavalt vedrustuse töötamisele
Passiivne ehk tavavedrustus - Passiivseks võime nimetada kõiki tavalisi või traditsioonilisi
vedrustussüsteeme. Nende süsteemide põhiomaduseks on see, et kui nad on sõidukile
paigaldatud, ei saa nende parameetreid (jäikust, kõrgust) enam muuta. Kõiki traditsioonilisi
vedrusid ja amortisaatoreid loetakse passiivseks vedrustuseks.
Reaktiivvedrustus - Siinsesse gruppi võib paigutada ka reaktiivsed vedrustused. Kui sõiduki
rattad veerevad üle muhu või augu, põhjustab ratta asendi muutumine vedrude
kokkutõmbumise või pikenemise. Kurvi võtmine, pidurdamine ja kiirendamine põhjustavad
samuti vedrustuse liikumist, mis omakorda põhjustab kere õõtsumist, noogutust või esiosa
tõusu. Reaktiivvedrustuse gruppi kuuluvad kõik vedrustussüstee
![Autode Ehitus]()
20
odt
Autode Ehitus.
) laager, mis asub
veosilla küljes. Rattavõll töötab väändele ja võtab vastu külgjõude.
Koormamata rattavõlli puhul toetub veoratta rumm kahele veosilla küljes olevale laagrile.
Rattavõll töötab ainult väändele.
Poolkoormatud rattavõlle kasutatakse sõiduautodel. Veerandkoormatud rattavõllid on
mõnedel sõiduautodel ja väikeveoautodel. Koormamata rattavõlle kasutatakse enamikul
veoautodel.
Autode käiguosa (veermiku) üldehitus
Auto veermik on see osa autost, mille kaudu kere toetub pinnale. Enamasti koosneb veermik
esi- ja tagasillast koos rataste ja vedrustusega. Mõnel autol on ratta telik kinnitatud otse kere
külge. Sellisel juhul silda kui autost eraldatavat sõlme polegi.
Sõiduauto esisild koosneb talast ja kahest telikust. Tala kinnitub kere esiosa või selle
poolraami külge. Telikud on vedrustusseadised, mis võimaldavad ratastel üles-alla liikuda.
Nendega on kokku ehitatud esirataste pidurimehhanismid ja rooliajam.
Traktorid ja liikurmasinad
![Sissejuhatus Erialasse]()
18
docx
Sissejuhatus Erialasse
Pidevlülituses oleva ventilaatoriga
Vaba tiivikuga, mida käitataks kas, elektrimootoriga, hüdrauliliselt, õhkajamiga
siduriga, õli-viskoossussiduriga.
Nõuded jahutusvedelikule:
Intensiivne soojusülekanne
Madal külmumistemperatuur
Kõrge keemistemperatuur
Vähene viskoossus
Suur soojusmahtuvus
Ei tohi korrodeerida metalle
Ei tohi mõjuda sööbivalt tihenditele, voolikutele
Peab olema võimalikult vähe tule ohtlik ja mürgine
� Veermik
Veoauto veermiku moodustavad raam, esi ja tagasild, vedrustus, amortisaatorid, rattad ja
rehvid. Volvo uuendatud mudelitel FH ja FM on nüüd kokku 3 erinevat alusvankrit: 1) sadulveok
2) veoauto 3) ehitusveok. Veokiseeria on tervikuna kujundatud ühiste komponentide baasil.
Ehitusveokit FM tehakse rattavalemiga 6x4, 8x4, 4x4 ja 6x6. Kõigil õhkvedrustusega autodel
kasutatakse üksnes ketaspidureid, neile lisandub mootorpidur ja aeglusti. Alusvanker muutus
endisest 160kg kergemaks
![Traktorid ja liikurmasinad]()
44
odt
Traktorid ja liikurmasinad
Liigendtraktorite esi- ja tagasild erinevad teineteisest üksnes karterite poolest. Peaülekanne
koosneb vedavast ja veetavast spiraalhammastega koonushammasrattast ja diferentsiaalist.
Diferentsiaal koosneb:
Kerest
· Kahest satelliitide teljest
· Neljast satelliidist
· Kahest pooltelje hammasrattast
· Tugiseibidest.
Pooltelje hammasrattad on ühendatud nuutide abil pooltelgedega, viimased
rattareduktoritega.
�Traktorite ja autode käiguosa.
Käiguosa ehk veermik kannab raskusjõu pinnasele ja paneb masina liikuma.
Koosneb:
· Teosest ehk alusest ehk raamist, mis võtab vastu masinale mõjuvad jõud ja tema
külge kinnitatakse kõik agregaadid.
· Käiturist ehk rattad eh kroomik, mis annab masinale liikuva kulgemise.
· Vedrustusest, mis ühendab toest käituriga ja teeb masina sõidu pehmeks.
Kliirens on masina kõige madalama osa ja pinnase või tee vahekaugus. Kliirensit saab
osadel traktoritel muuta
Traktorid ja liikurmasinad
Meedia
Kommentaarid (0)














































Kõik kommentaarid