Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-3 Kineetilise energia teoreem Tallinn 2009 Kodutöö D-3 Kineetilise energia teoreem Leida mehaanikalise süsteemi mingi keha kiirus ja kiirendus, või mingi ploki nurkkiirus ja nurk- kiirendus vaadeldaval ajahetkel, kasutades kineetilise energia muutumise teoreemi. Mõningates variantides tuleb leida ainult mingi keha kiiruse. See, millise suuruse tuleb variandis leida, on täpsustatud iga variandi juures. Kõik süsteemid on alghetkel paigal. Kõik vajalikud arvulised andmed on toodud vastava variandi
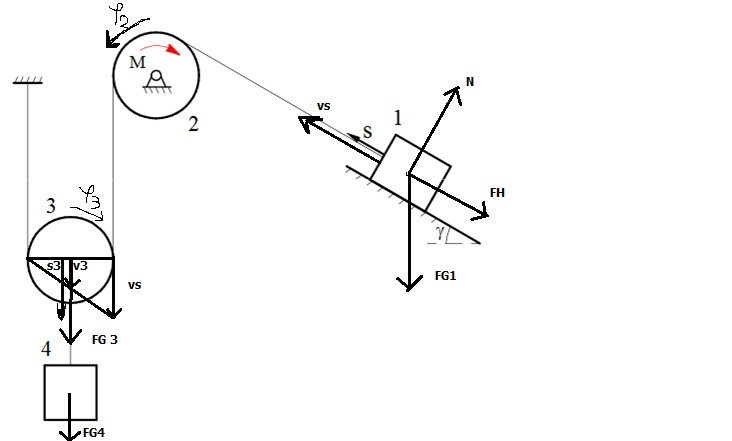
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool Dünaamika Kodutöö D-3 Üliõpilane: Matriklinumber: 3 Rühm: Kuupäev: 25.04.2013 Õppejõud: Gennadi Arjassov Variant 17. Süsteem koosneb kehast 1 massiga m1, kaksikplokist 2 massiga m2 ning ühtlasest kettast 3 massiga m3. Kaksikploki 2 inertsiraadius tsentrit läbiva telje suhtes on i2, ketaste raadiused on: suuremal R2 ja väiksemal r2. Trumli 3 raadius r3=r. Kehas 2 ja 3 on omavahel ühendatud kaalutu ja venimatu rihma abil, rihm ketaste suhtes ei libise
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega.
Valemina r r F = ma , kus m on vaadeldava keha mass. Juhul kui kehale mõjub samaaegselt mitu erinevat jõudu, määrab keha kiirenduse kehale mõjuv kogujõud. Nüüd on Newtoni II seadus kujul r r Fk = ma , r kus kehale mõjuv kogujõud Fk on võrdne kõikide kehale mõjuvate jõudude vektorsummaga r r r r Fk = F1 + F2 + L + Fn . 1 Newtoni II seadust nimetatakse ka dünaamika, täpsemalt küll klassikalise mehaanika põhiseaduseks, sest see võimaldab kehale mõjuvate jõudude kaudu leida tema liikumise. Keha trajektoori leidmiseks peame lisaks kehale mõjuvatele jõududele teadma veel algtingimusi keha asukohta ja kiirust mingil ajahetkel. Newtoni III seadus Newtoni III seadus kahe keha jaoks r r F12 = - F21 , r r
6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi- pöörlemissagedus nn = 1000 min-1, ankruahela takistus (ankru- ja lisapooluste mähised) Ra = 0,2 ja ankruahelasse on lülitatud lisatakisti takistu
Valemina r r F = ma , kus m on vaadeldava keha mass. Juhul kui kehale mõjub samaaegselt mitu erinevat jõudu, määrab keha kiirenduse kehale mõjuv kogujõud. Nüüd on Newtoni II seadus kujul r r Fk = ma , r kus kehale mõjuv kogujõud Fk on võrdne kõikide kehale mõjuvate jõudude vektorsummaga r r r r Fk = F1 + F2 + L + Fn . 1 Newtoni II seadust nimetatakse ka dünaamika, täpsemalt küll klassikalise mehaanika põhiseaduseks, sest see võimaldab kehale mõjuvate jõudude kaudu leida tema liikumise. Keha trajektoori leidmiseks peame lisaks kehale mõjuvatele jõududele teadma veel algtingimusi – keha asukohta ja kiirust mingil ajahetkel. Newtoni III seadus Newtoni III seadus kahe keha jaoks r r F12 = − F21 , r r
KOOLIFÜÜSIKA: MEHAANIKA3 (kaugõppele) 3. IMPULSS, TÖÖ, ENERGIA 3.1 Impulss Impulss, impulsi jäävus Impulss on vektor, mis on võrdne keha massi ja tema kiiruse korrutisega r r p = mv . Mehaanikas nimetatakse impulssi vahel ka liikumishulgaks. See on vananenud mõiste ja selle kasutamine ei ole otstarbekas. Nii näiteks on ka elektromagnetväljal impulss, mille üheks avaldusvormiks on valgus rõhk. Elektromagnetvälja korral aga on liikumishulga mõiste kohatu. Impulsi mõiste on kasulik seetõttu, et teatud juhtudel, näiteks kehade põrgetel, kehtib impulsi jäävuse seadus. Viimase üldine sõnastus on järgmine. Impulsi jäävuse seadus: suletud (isoleeritud) süsteemi koguimpulss on jääv suurus, st mistahes ajahetkel on süsteemi kuuluvate kehade impulsside summa konstantne r r r p1 + p 2 + L + p n = const. Kehade liikumisel ja omavahelistel vastastikmõjudel kehade impulsid muutuvad, muutuda võib ka kehade arv süsteemis. Nii näiteks võivad k
KOOLIFÜÜSIKA: MEHAANIKA3 (kaugõppele) 3. IMPULSS, TÖÖ, ENERGIA 3.1 Impulss Impulss, impulsi jäävus Impulss on vektor, mis on võrdne keha massi ja tema kiiruse korrutisega r r p = mv . Mehaanikas nimetatakse impulssi vahel ka liikumishulgaks. See on vananenud mõiste ja selle kasutamine ei ole otstarbekas. Nii näiteks on ka elektromagnetväljal impulss, mille üheks avaldusvormiks on valgus rõhk. Elektromagnetvälja korral aga on liikumishulga mõiste kohatu. Impulsi mõiste on kasulik seetõttu, et teatud juhtudel, näiteks kehade põrgetel, kehtib impulsi jäävuse seadus. Viimase üldine sõnastus on järgmine. Impulsi jäävuse seadus: suletud (isoleeritud) süsteemi koguimpulss on jääv suurus, st mistahes ajahetkel on süsteemi kuuluvate kehade impulsside summa konstantne r r r p1 + p 2 + L + p n = const. Kehade liikumisel ja omavahelistel vastastikmõjudel kehade impulsid muutuvad, muutuda võib ka kehade arv süsteemis. Nii näiteks võivad k

















Kõik kommentaarid