JÕGEVA
PÕHIKOOL
8.C
klass
Kristjan Krihvel
Tõstuk
ja robootika
Loovtöö
Juhendaja Heli Toit
Jõgeva
2015
Sisukord
Sisukord 2
Sisukord 2
2
Sisukord 2
Sisukord 2
Sisukord 2
Sisukord 2
Sisukord 2
Sissejuhatus 3
1. Robootika kolm põhiseadust. 4
Sõna robootika tuleb sõnast Josef Čapeki loodud sõnast ´´
robot ´´, selle tõi inimkonna ette
tšehhi Kirjanik
Karel Čapek oma lavastuses´´R.U.R´´.Sõna ´´robootika kasutas esimestkorda
Isaac Asimov . Asimovilt pärinevad ka robootika kolm põhiseadust.. 4
2. Robotite liigid. 5
3.
Mootorid kui lihased. 6
4. Tähtsamad robotite
klassid 8
5.
Andurid ja millest toitub 9
6. Töö 10
Kokkuvõte 11
Kasutatud Kirjandus 12
Sissejuhatus
Täna
ma räägin teile oma robotist veidi lähemalt mis on robootika ja ka
mõndasi pilte robootikast.. Ma valisin selle ala kuna ma ise olen
sellega varem
tegelenud ja mulle meeldib asju ise välja mõelda.
Paljudele tundub et robootika on raske ja igav kuid see on vale, kuna
isegi see kes pole varem sellega tegelnud robootikaga oskab midagi
liikuvat kokku meisterdada.
1. Robootika kolm põhiseadust.
Sõna
robootika tuleb sõnast Josef
Čapeki
loodud sõnast ´´robot´´,
selle
tõi inimkonna ette tšehhi
Kirjanik Karel Čapek oma
lavastuses´´R.U.R´´.Sõna ´´robootika
kasutas esimestkorda Isaac Asimov. Asimovilt pärinevad ka robootika
kolm põhiseadust..
- Robot ei tohi oma tegevuse ega tegevusetusega inimesele kahju teha .
- Robot peab täitma inimese antud korraldusi, kui need pole vastuolus esimese seadusega.
- Robot peab kaitsma oma olemas olu, kuni see ei lähe vastuolul esimese ega teise seadusega.
2. Robotite liigid.
Maailmas on olemas mitu roboti liiki nn .
- Android robotid
Android robot kujutab iseendas seda et ta on kokku pandud mitmetest jupitest .Ning seda juhitakse arvutiteel.
- sumo robotid
Sumo robot valmistatakse selleks et võitlus platsil teisi roboteid välja suruda. Sumo robot peab võimalikult tugev olema ja kiire et teda ise väljakul välja ei suruta.
- Pehme rorbootika
Pehme robootika on uus robootikavaltkond,mille eesmärk on tavapäraste kõva kerega robotite asemel teha roboteid pehmest Nanorobootikamaterjaalist et ta oleks painduvam ja suurem liikumis vabadus .
- Nanorobootika
nanorobootika on tehnoloogia haru,kus kõik mainad ja robotid on 1-10 mikromeetrit .Nanorobootika viitab täpsemalt nanotehnoloogiainseneri erialale .
3. Mootorid kui
lihased.
Robotite
mootoreid nimetatakse ka ajamiteks. Praegusel ajal on kõige
populaarsemad elektrimootorid ,kuid on ka teissuguseid mootoreid nt
mis kasutavad keemilisi aineid ning suruõhu mootoreid on ka
alalisvoolu mootorid: ja enamikud kaasaegsed robotid kasutavad neid
ja neid võib olla mitu liiki. On olemas ka Piesomootorid ja
sammuvad mootorid nagu nime järgi võib arvata ei liigumootor vabalt
nagu Alalisvoolu mootor seda saab juhtida kontrolleri juhtimisel,
Piesomootorid on alalisvoolu mootorite kaasaegne alternatiiv,neid
tuntakse kui ka ultrahelimootorite all. Nende tööpõhimõte on
ainulaadne: Neil on piesoelektrilised jalad mis vibreerivad üle 1000
korra sekundis ning need panevad mootori liikuma.
- Elektrimootorid
Elektrimootor on elektromehaaniline seade,mis muundab eektrienergia mehaanliseks tööks.Enamik töötab tänelektromagnetismi nähtusele..
- Alalisvoolumootor
Alalisvoolumootoron on mootor mis töötab alalisvooluga. Alalisvoolumasin on alaliik mis on ettenähtud tööks alalisvooluga .
- Samm-mootor
Samm-mootor on alalisvoolu sünkroonmootor ,mille rootor pöörab ennast vastavalt juhtseadmest saadud Pingeimpulssidele
4. Tähtsamad robotite
klassid
On
olemas ka tähtsamaid robotite klasse näiteks Manipulatsiooni robot
ja mobiilrobot. Manipulatsioonirobot on automaatmasin,mis on
täiturseadisest manipulaatori kujul, sellel robotil on mitu
liikuvuse astet, ja programmjuhtimise seadisest, sellised täidavad
töötlusprotsessis liikumise ja juhtimise funktsioone. Aga selliseid
roboteid tehakse põranda-,
ripp - ja portaalteostustes. Mobiilrobot
on ka automaatmasin, milles on liikuv masin automaatselt juhitavate
ajamitega,sellised on ainult ratta-,samm-,ning roomikrobotid.
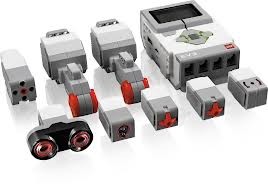
5. Andurid ja
millest toitub
Robootika
robot toitub oma aju küliess olevast akust, tavaliselt kasutatakse
NiMh või Li-on akusid kuna need peavad kauem vastu. Robotit saab
programmeerida arvutiga kui ka käsitsi juhtida. Robootika robotil on
3 mootorit ja 5 andurit 2 puuteandurit,1 infrapunaandur, valgusandur
ja silmad millega ta kaugust mõõdab.
6. Töö
Ma
alustasin töö algust sellega et ma
tegin valmis roboti, kui mul
robot sai valmis hakkasin kirjaliku tööd mis oli küll raskem kui
praktiline kuid mitte eriti sest palju ma teatsin ise ja internetis
oli palju kirjaliku. Mu robot koosneb kolmest mootorist ja umbes
20-30 jupist mul läks umbes nädal kui ma roboti valmis sain, mulle
meeldis kõige
rokem see et sain ise väljmõelda mis suguse robotima
valmistan. Ma valmistasin käsitsi juhitava tõstukroboti. Robot
tõstab legost tehtud väikseid klotse, kuid
klotsid ei tohi olla
väga rasked muidu ta ei jaksa tõsta.
Kokkuvõte
See
loovtöö andis mulle
robotika kohta palju teadmisi
juurde kui ma algul teatsin. Ma algul arvasin et see loovtöö on
raske kuid kui ma alustasin sellega siis see muutus huvitavaks ja
lõbusaks ning ma soovitan ka teistele orbootikad kuna see on
huvitav.
Kasutatud Kirjandus



























Kõik kommentaarid