PAIGALDUS SILINDRILISELE TORNILE JA EKSTSENTRIKMEHHANISM Õppeaines: RAKISTE PROJEKTEERIMINE Mehaanikateaduskond Esitamiskuupäev: Üliõpilase allkiri:…………….. Õppejõu allkiri: ……………… Tallinn 2017 SISUKORD 1. LÄHTEANDMED „PAIGALDUS SILINDRILISELE TORNILE“ ...........................................3 2. PAIGALDUS SILINDRILISELE TORNILE ..............................................................................4 2.1. Algandmed.............................................................................................................................4 2.2. Lahendus ................................................................................................................................4 3. LÄHTEANDMED „EKSTSENTRIKMEHHANISM“ ................................................................6
EESTI MEREAKADEEMIA RAKENDUSMEHAANIKA ÕPPETOOL MTA 5298 RAKENDUSMEHAANIKA LOENGUMATERJAL Koostanud: dotsent I. Penkov TALLINN 2010 EESSÕNA Selleks, et aru saada kuidas see või teine masin töötab, peab teadma millistest osadest see koosneb ning kuidas need osad mõjutavad teineteist. Selleks aga, et taolist masinat konstrueerida tuleb arvutada ka iga seesolevat detaili. Masinaelementide arvutusmeetodid põhinevad tugevusõpetuse printsiipides, kus vaadeldakse konstruktsioonide jäikust, tugevust ja stabiilsust. Tuuakse esile arvutamise põhihüpoteesid ning detailide deformatsioonide sõltuvuse väliskoormustest ja elastsusparameetritest. Detailide pinguse analüüs lubab optimeerida konstruktsiooni massi, mõõdu ja ökonoomsuse parameetrite kaudu. Masinate projekteerimisel omab suurt tähtsust detailide materjali õige valik. Masinaehitusel kasutatavate materjalide nomenklatuur täieneb pidevalt, rakendatakse efekti
Loengukonspekt õppeaines MASINAMEHAANIKA Koostanud prof. T.Pappel Mehhatroonikainstituut Tallinn 2006 2 SISUKORD SISSEJUHATUS 1. ptk. MEHHANISMIDE STRUKTUURITEOORIA 1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid. Liigliikuvused 1.2.1. Vabadusaste 1.2.2. Liigseondid. Liigliikuvused. 1.3. Mehhanismide struktuuri sünteesimine 1.3.1. Struktuurigrupid 1.3.2. Kõrgpaaride arvestamine 1.3.3. Kinemaatiline skeem. Struktuuriskeem 2. ptk. MEHHANISMIDE KINEMAATILINE ANALÜÜS 2.1. Eesmärk. Algmõisted 2.2. Mehhanismide kinemaatika analüütilised meetodid
V.Jaaniso Pinnasemehaanika 1. SISSEJUHATUS Kõik ehitised on ühel või teisel viisil seotud pinnasega. Need kas toetuvad pinnasele vundamendi kaudu, toetavad pinnast (tugiseinad), on rajatud pinnasesse (süvendid, tunnelid) või ehitatud pinnasest (tammid, paisud) (joonis 1.1). a) b) c) d) J o o n is 1 .1 P in n a s e g a s e o tu d e h i tis e d v õ i n e n d e o s a d .a ) p i n n a s e le t o e t u v a d ( m a d a l - j a v a iv u n d a m e n t) b ) p i n n a s t t o e t a v a d ( t u g is e in a d ) c ) p in n a s e s s e r a j a tu d ( tu n n e li d , s ü v e n d i d d ) p in n a s e s t r a j a tu d ( ta m m i d , p a is u d ) Ehitiste koormuste ja muude mõjurite tõttu pinnase pingeseisund muutub, pinnas deformeerub ja võib puruneda nagu kõik teisedki materjalid. See põhjustab
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................5 Sümbolid .....................





















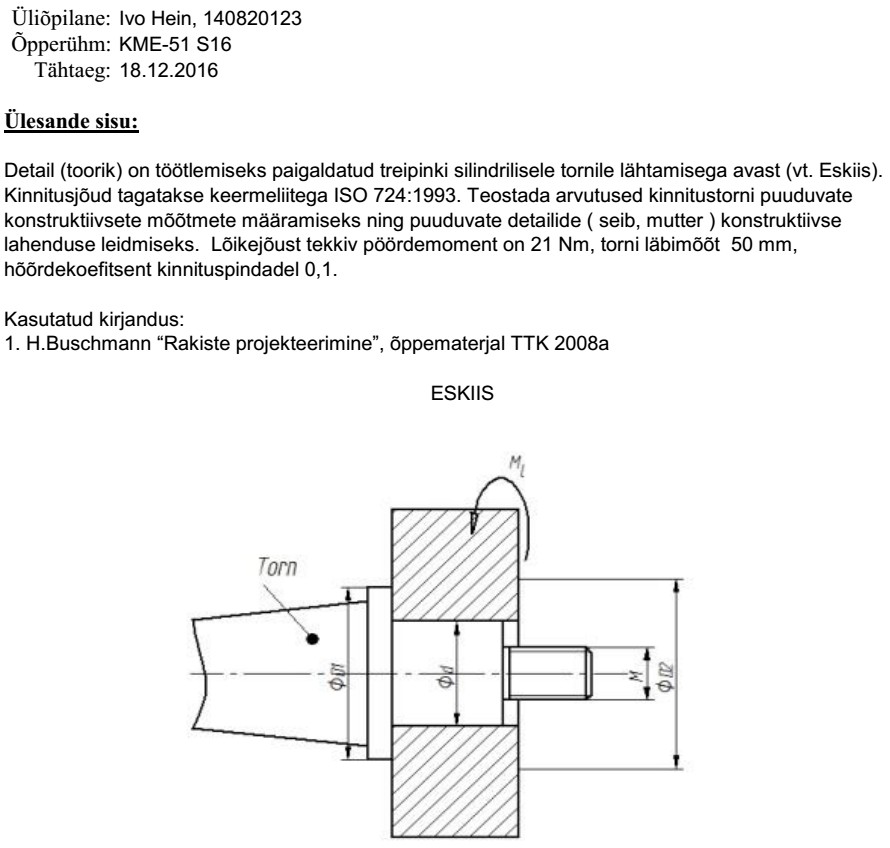
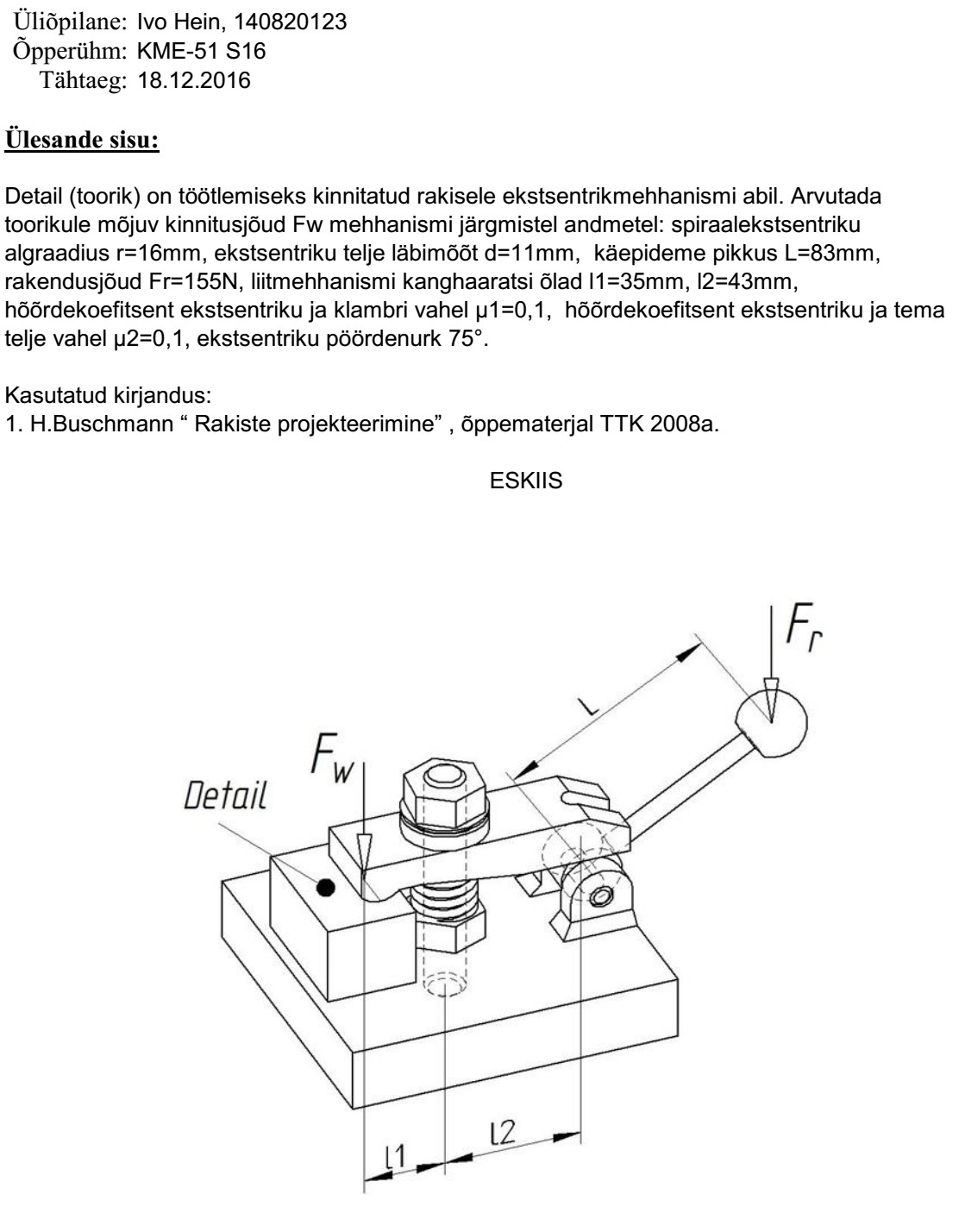




Kõik kommentaarid