Joonestada pcidrdkoonuse pdhjaring-
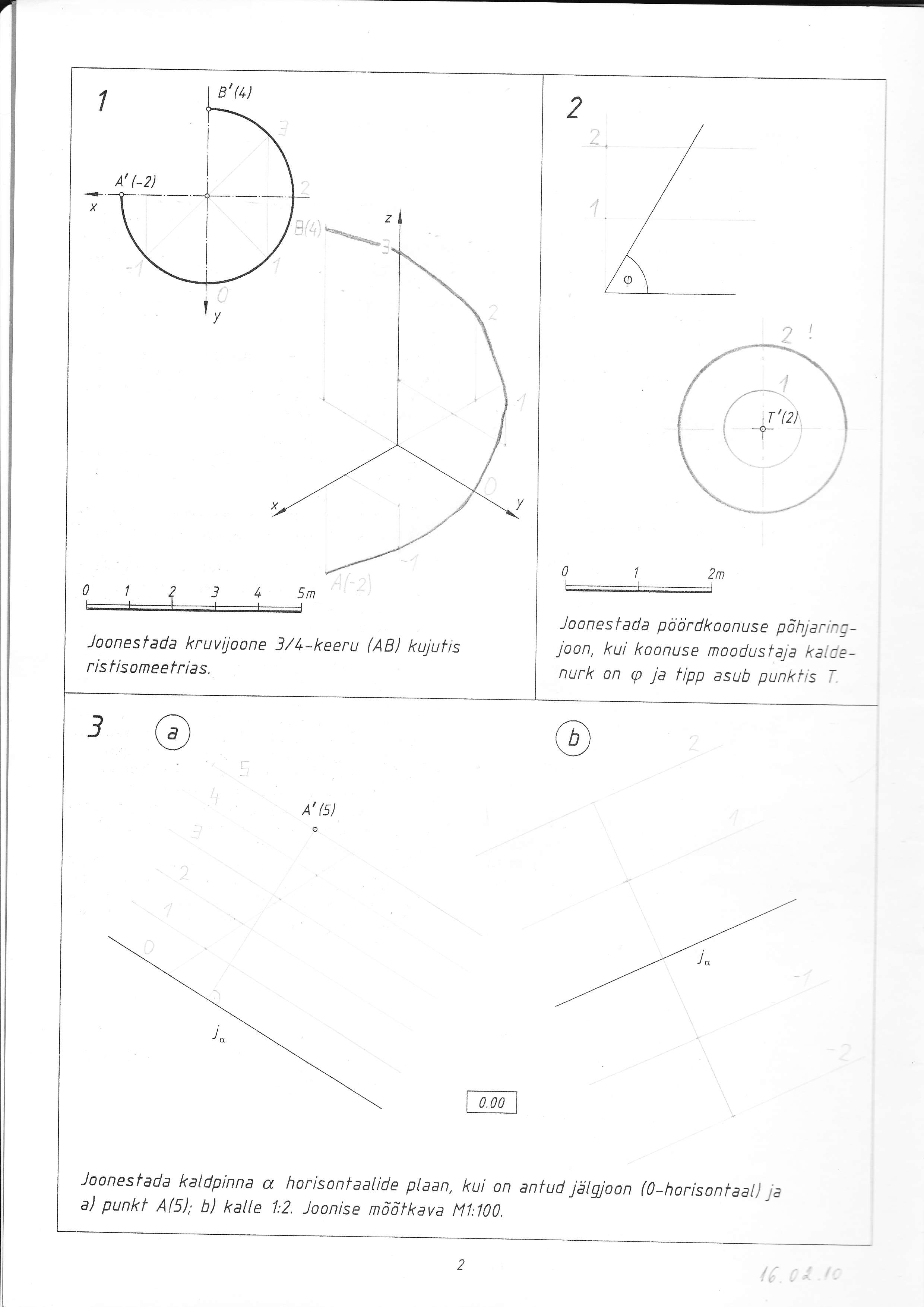
Joonestada
kruvijoone i/4-keeru (AB)
kujut 'is joon, kui
koonuse moodust,aja
kalde -
ris tisoneetrias. nurk on rp ja t'ipp asub punkfis T.
3 @ a rl
L I A'(5) -r ,o...
-2- .. /j
D
j, ''-\
Joonesfada kaldpinna a
horisont 'aalide plaan, kui on ant'ud jdlqloon (0-horisonfaat) ja
a) punkf A(5); b) kalle l:2. Joonise nd6t'kava Ml;100,
16. o l .tc 0 I 2 3 4 5n
+
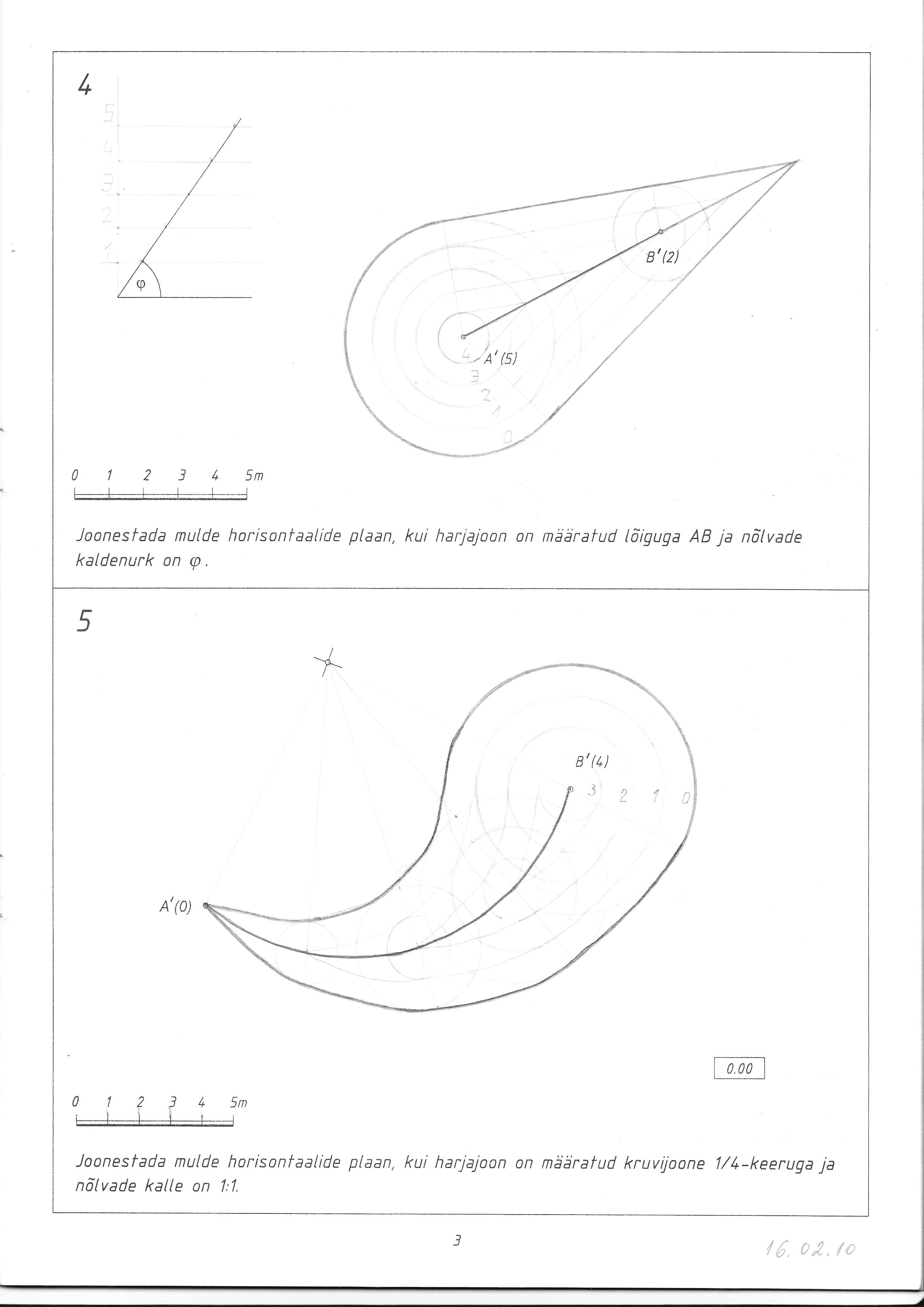
Joonest'ada nulde horisontaalide plaan, kui harjajoon 0n nddrafud ldiguga AB ja n6lvade
kaldenurk on e.
5
012345n
L-l---+-i=----+:=-r
Joonesfada nulde horisonfaalide plaan, kui harjajoan on nddrat'ud kruvijoone l/4-keeruga ja
ndlvade kalle on l:l
/6,0/..to 0' .:."' ltttti 5n @
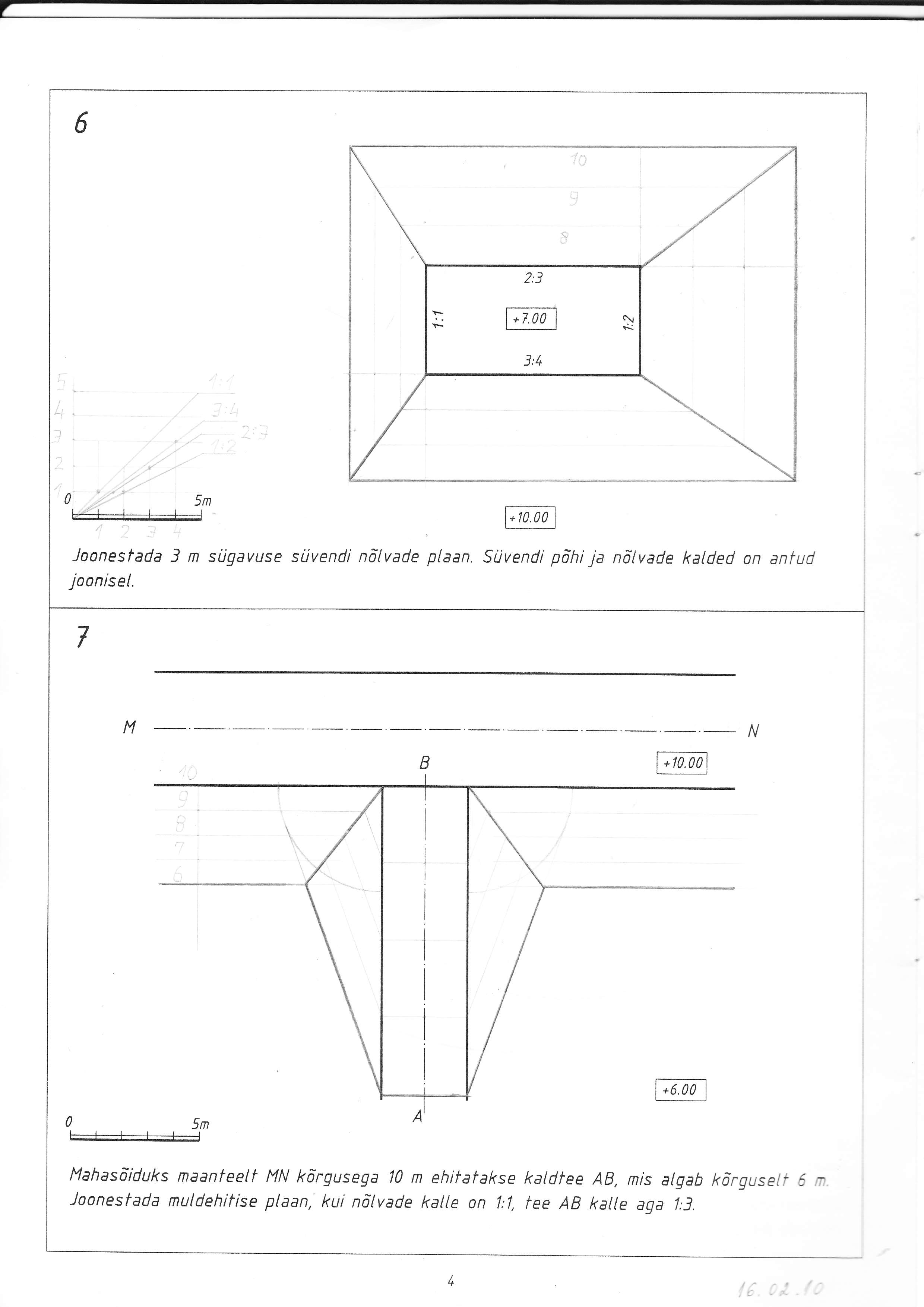
Joonesfada 3 n sAgavuse s[ivendi ndlvade plaan. S[ivendi pdhi ja ndlvade kalded on antud
joonisel.
rltttr
Mahasdiduks naant'eelf MN kdrgusega 10 n ehit'afakse kaldfee AB, nis algab kdrguselt' 5n
Joonestada nuldehitise plaan,' kui ndlvade kalle on l:1, tee AB kalle aqa l:3. I A-A
a; e701
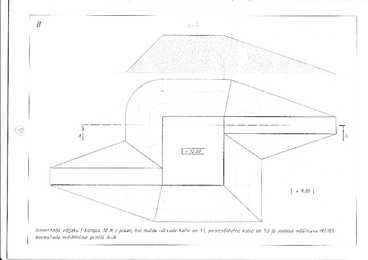
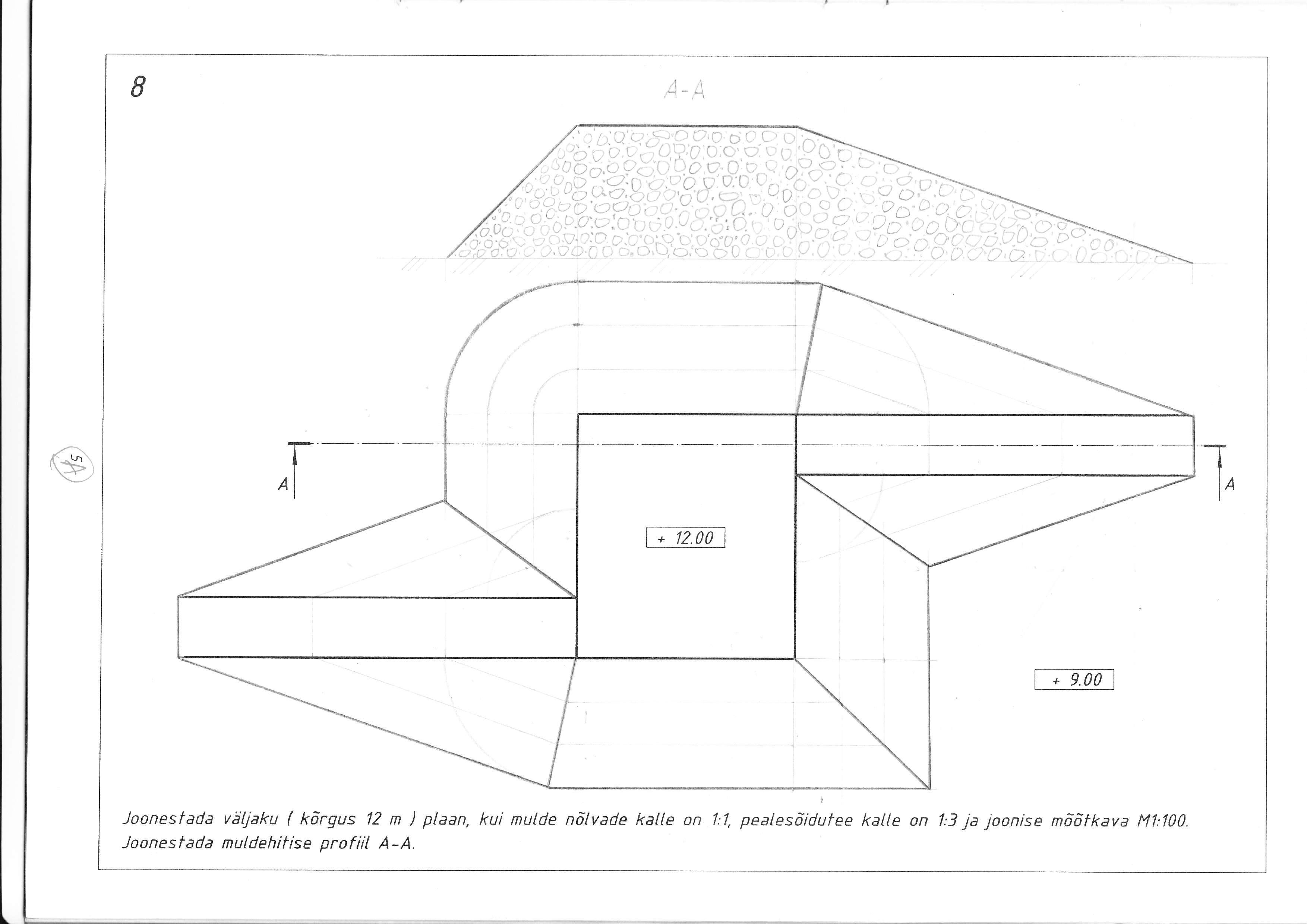
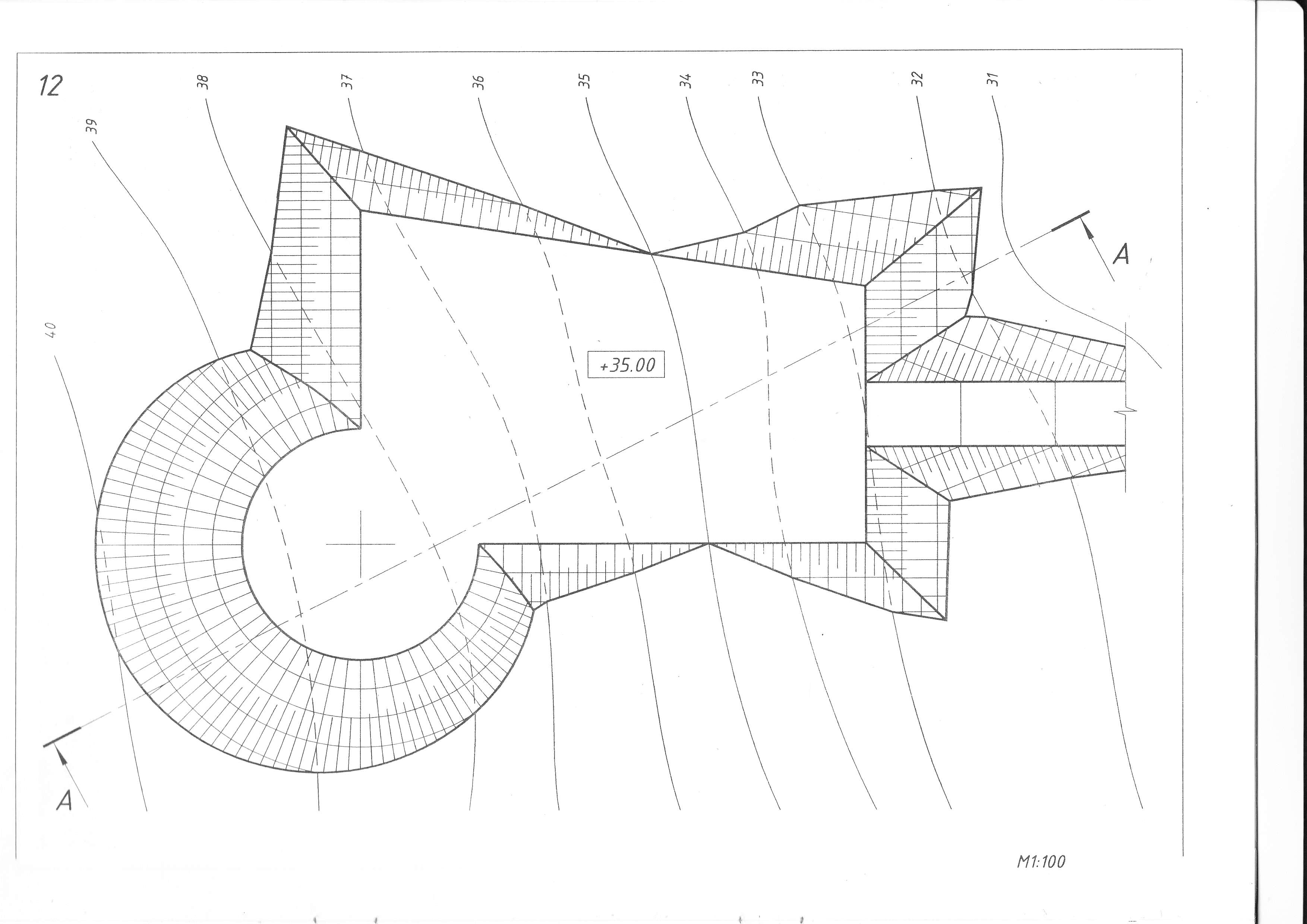
Jooneslada vdljaku ( kdrgus 12 n ) plaan, kui nulde ndtvade kalle on t|, pealesdidufee katte on 1:3 ja joonise nddlkava Ml:100.
Joonesfada nuldehilise
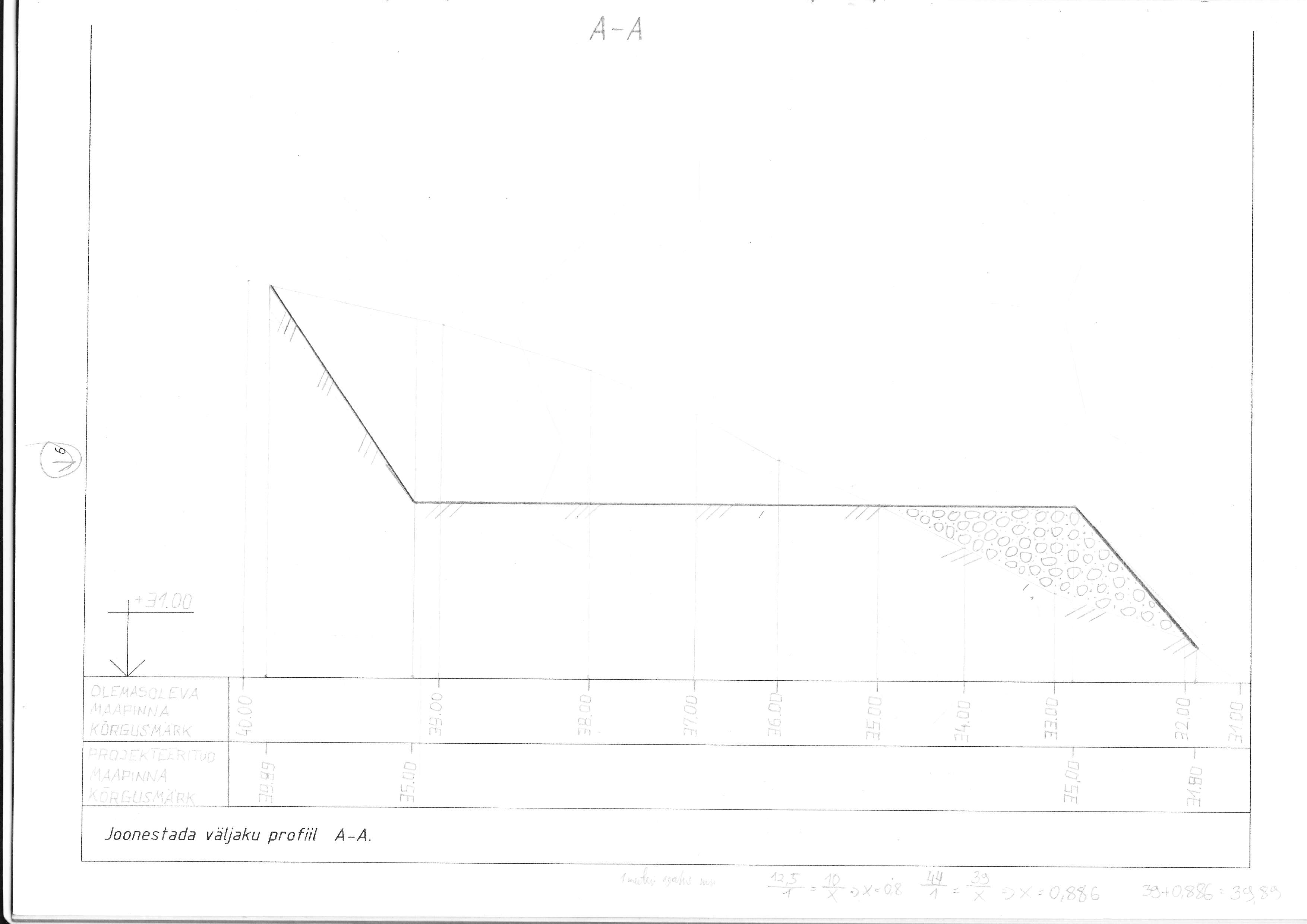
profiil A-A. lc*r*ar"(,,
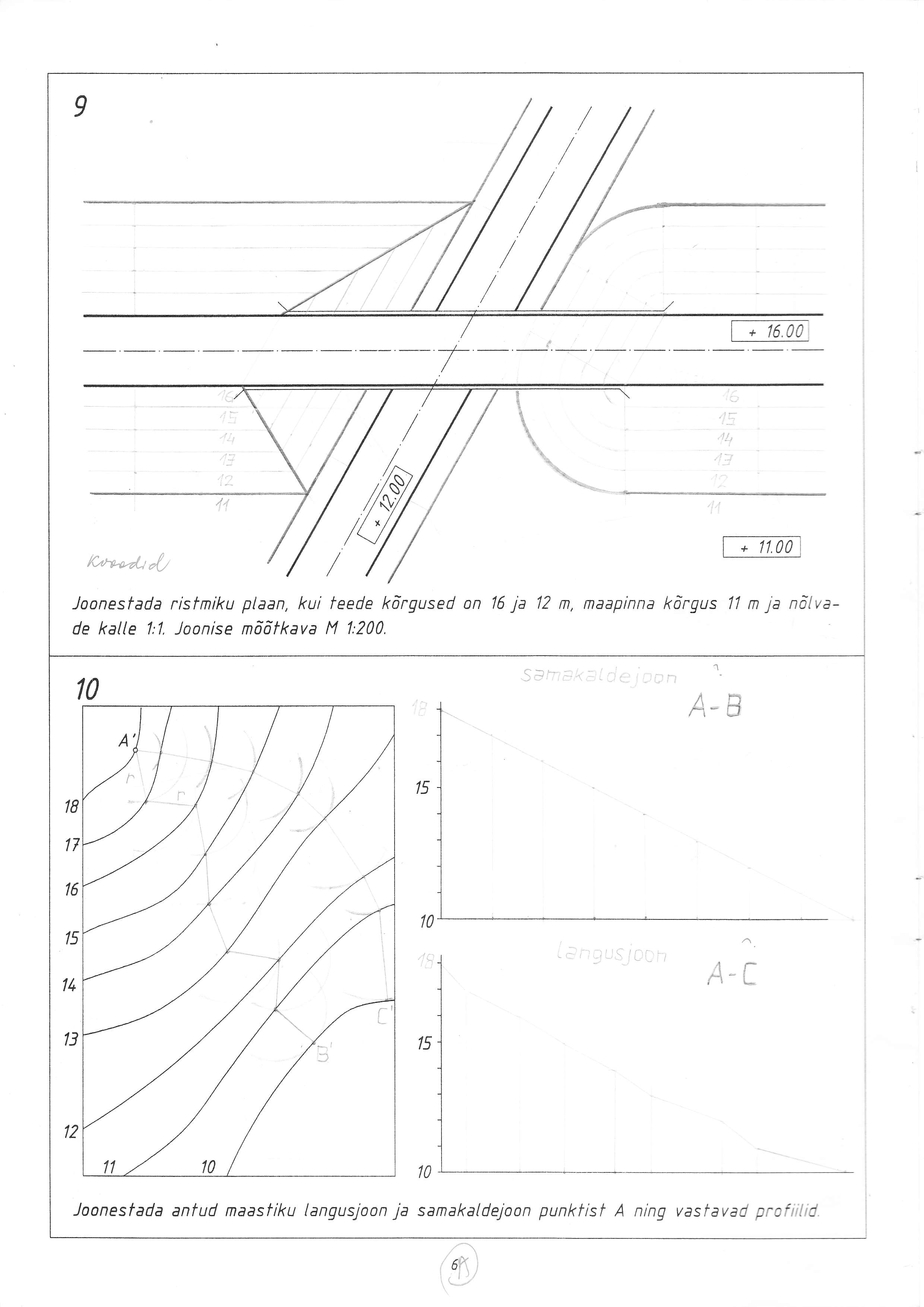
Joonestada ristniku plaan, kui feede kdrgused on 16 ja 12 n, maapinna kdrgus ll n ja ndlva- de kalle l:1. Joonise nddfkava M l:200.
A'-
t8
t7
t5
t5 i: I Lrs lot fr
t4
Joonesfada anlud maast'iku
langusjoon ja sanakaldejoon punkfisf A ning vasfavad profiilid.
(^ \
15
14
t3
1"-
it I
I
0l2i/,5n lltttl
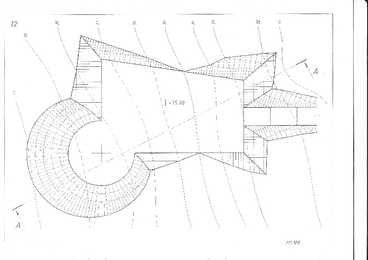
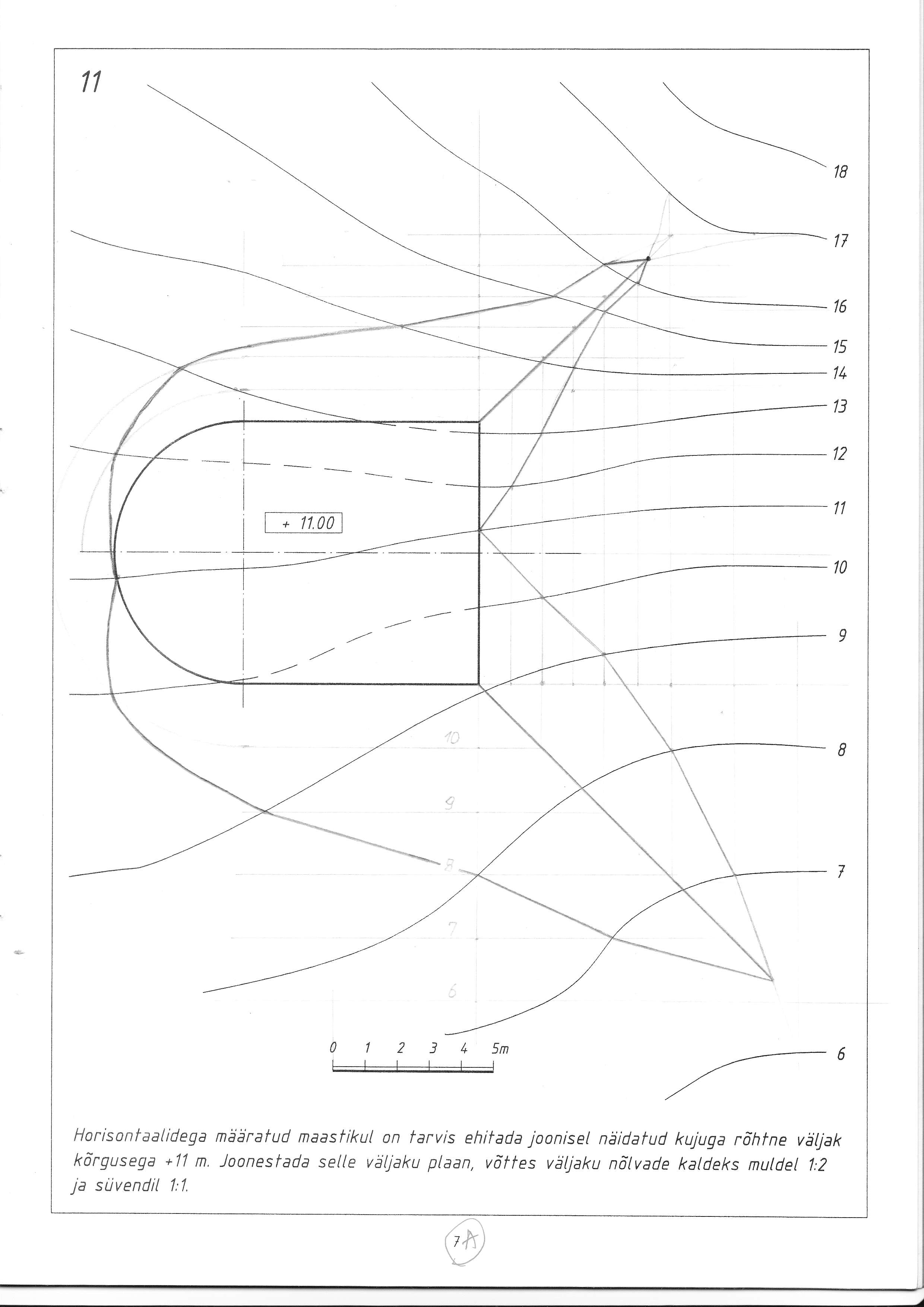
Horisontaalidega mddratud naasfikul on farvis ehitada joonisel ndidafud kujuga rdhfne viljak
kdrgusega *ll n, Joonesfada selle vdljaku plaan, vdft'es vdljaku ndlvade kaldeks nutde[ 1:2
ja s0vendil 1:1. 'r-/\ \ .'' -t|''
\, I
v-
y \, \\ \--- ---\ I
i
1 -\-' \
", +)v# r\
\, -71
I I !',,\
') I -, :l 'l -i -: irl i.l/if:1rs,,"1 l'rl i _-_r I
ll1 , 1: 1 rl rJ -:l -l iil \ L.i i"rt j \,: i ;-i
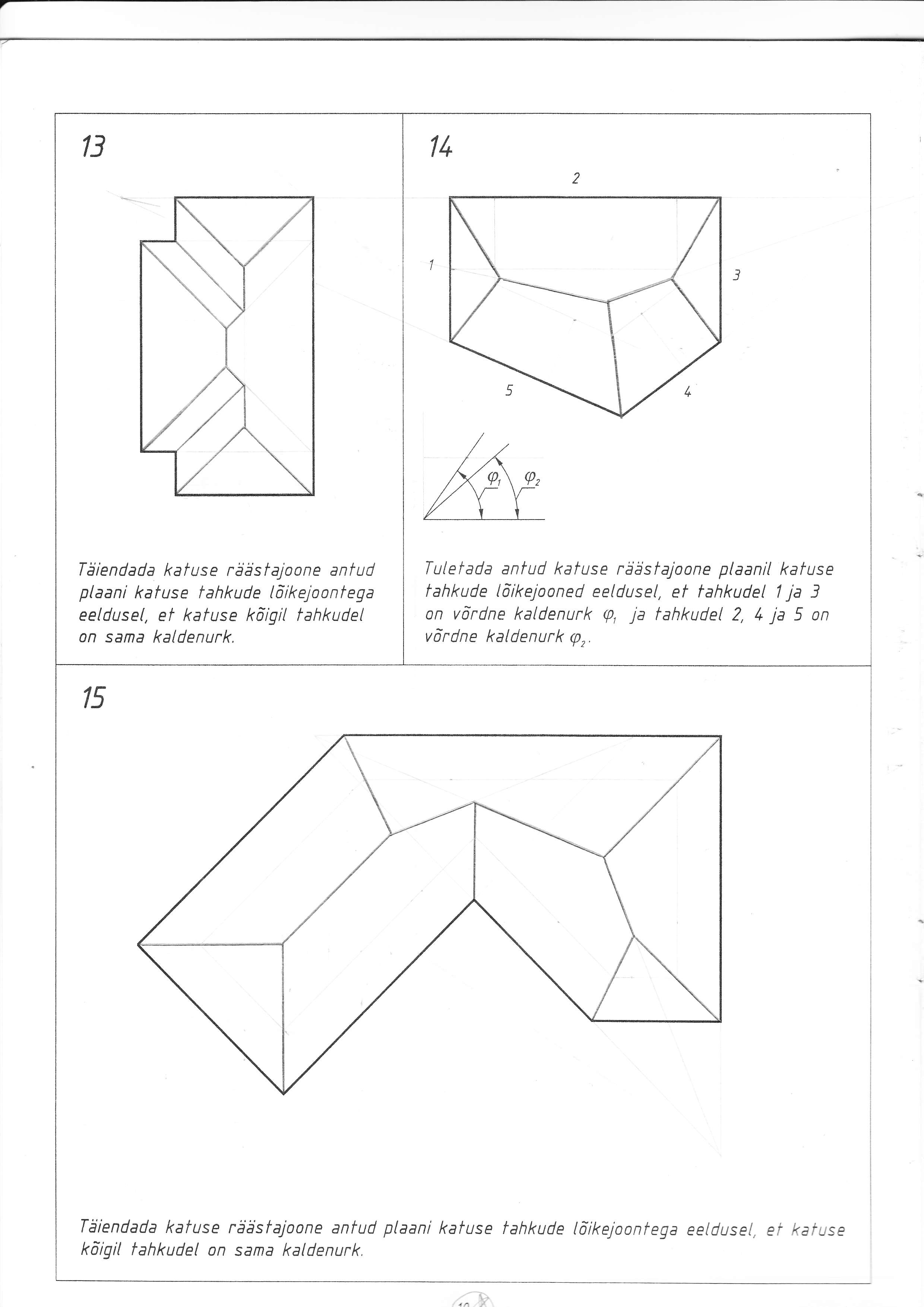
Joonestada vdljaku profiil A-A. Tiiiendada kafuse rddsfajoone ant'ud Tulefada anfud kafuse rddst'ajoone plaanil kafuse
plaani kafuse fahkude l1ikejoonfega tahkude l6ikejooned
eeldusel , et' fahkudel I ja 3
eeldusel, et katuse kdigil tahkudel on vdrdne kaldenurk g, ja tahkudel 2, 4 ja 5 on
on sdna kaldenurk, vdrdne kaldenurk cp,,
t5
Tdiendada kafuse rddst'ajoone ant'ud plaani kafuse fahkude ldikejoont'ega eeldusel, et' katuse
kdigil fahkudel on
sana kaldenurk,
---i> t5
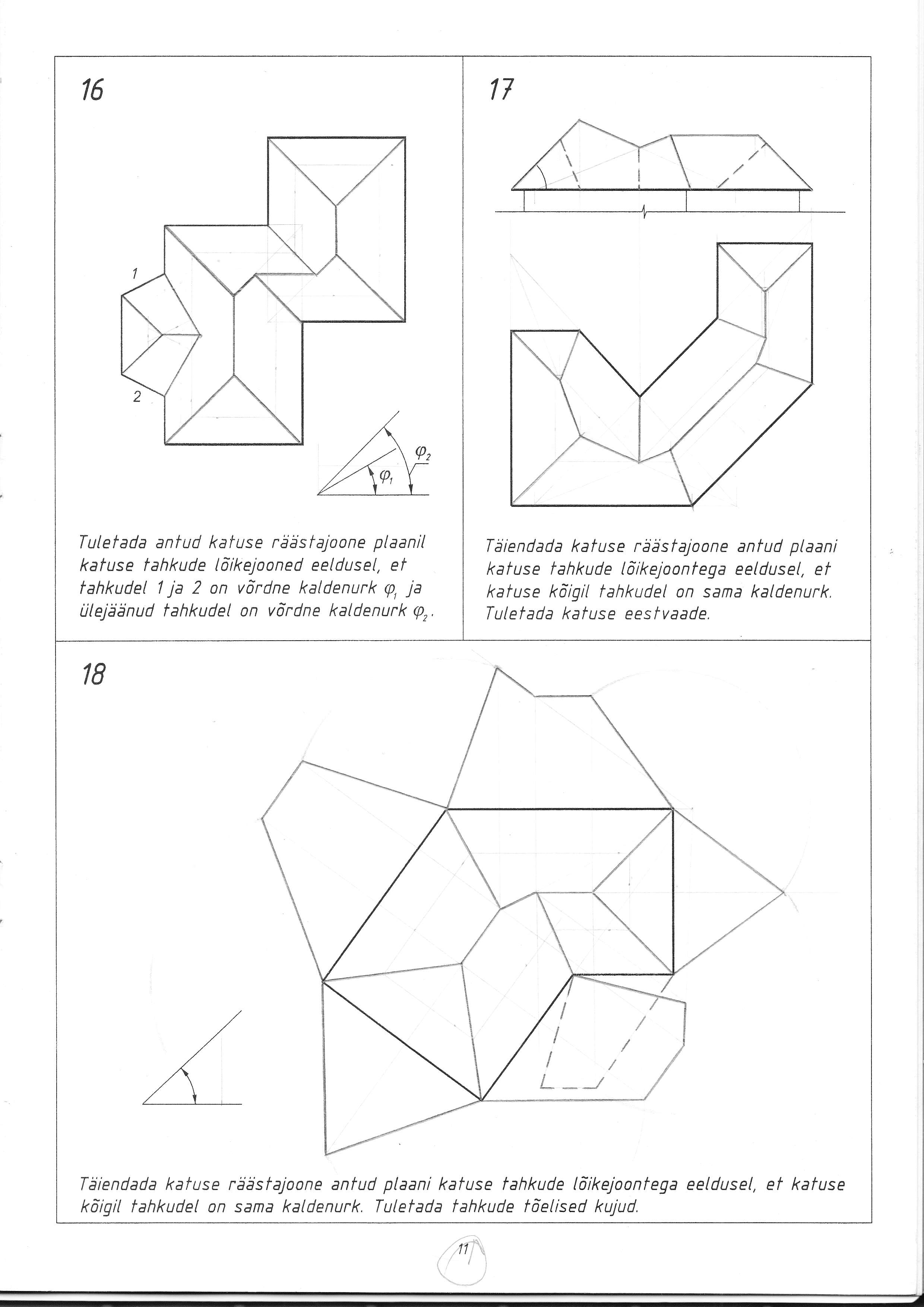
Tulet 'ada antud kafuse radstajoone plaanrl Tdiendada kafuse rddsfajoone anfud plaani
katuse fahkude l6ikejooned eeldusel, et kat'use t'ahkude l1ikejoonfega eeldusel, et'
tahkudel I ja 2 on vdrdne kaldenurk rp, ja kat'use kdigil fahkudel on sana kaldenurk.
illej55nud fahkudel on vdrdne kaldenurk p,, Tulefada kat'use eest'vaade.
1B
Tiiiendada kafuse rJdsfajoone anfud plaani kafuse t'ahkude l6ikejoonfega eelduse[, ef kafuse
kdiqil fahkudel 0n sana kaldenurk. Tulet'ada fahkude fdeIised kujud. I I
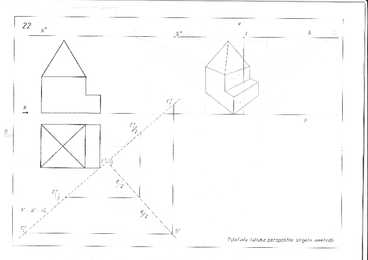
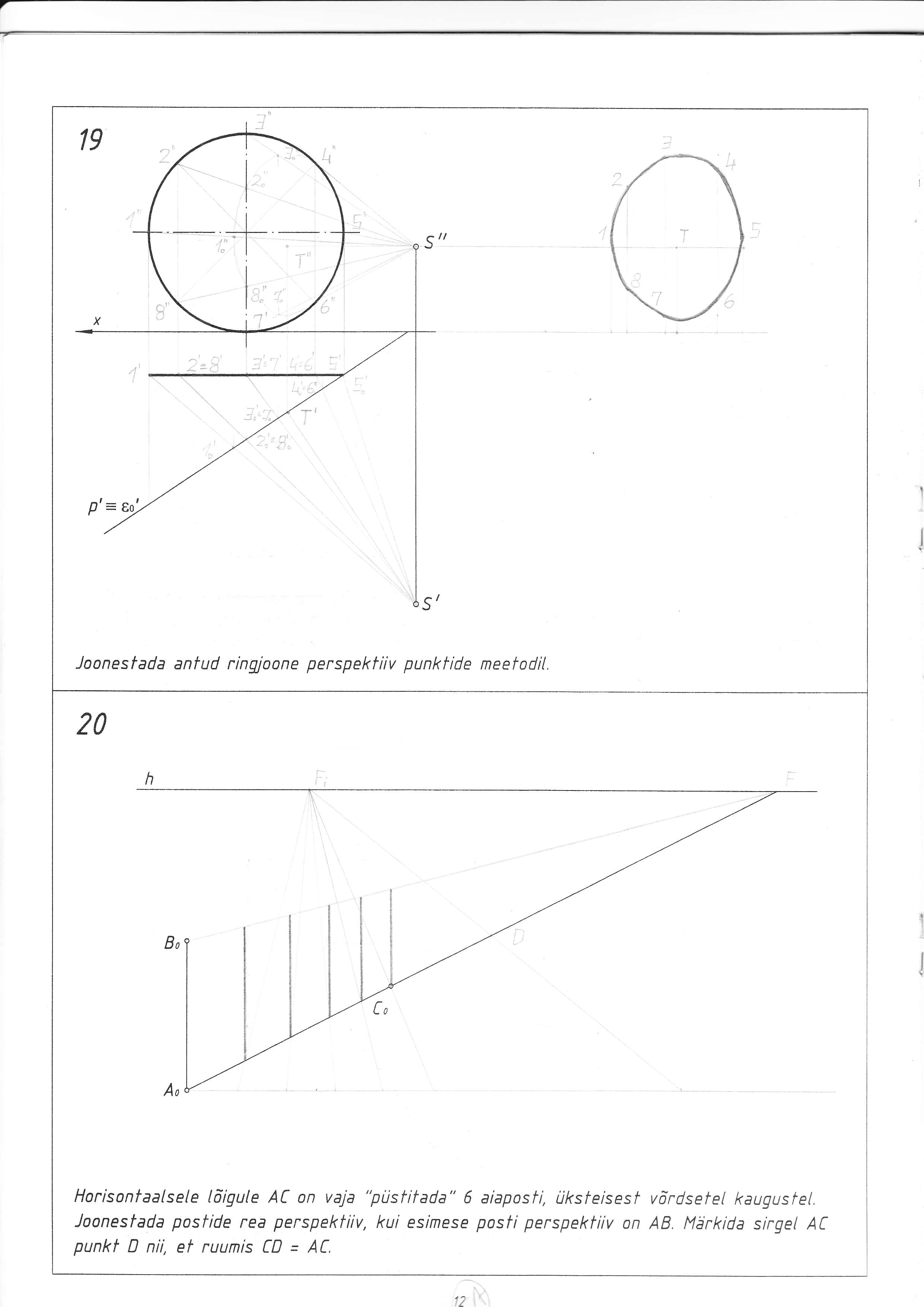
Joonesfada anfud rinqjoone perspekfiiv punkfide neefodil
20
Horisonfaalsele ldigule At on vaja "pijsfifada" 6 aiapost'i, iikst'eisest vdrdsete! kaugustel.
Joonestada posfide rea
perspektiiv , kui esinese posfi perspekfiiv on AB. Mdrkida sirgel AC
punkf D nii, ef ruunis CD = AC. 2t
1
T
t
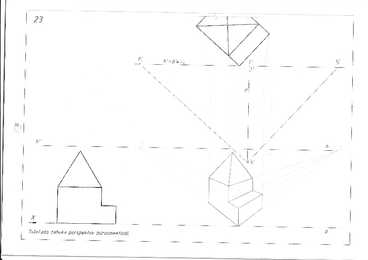
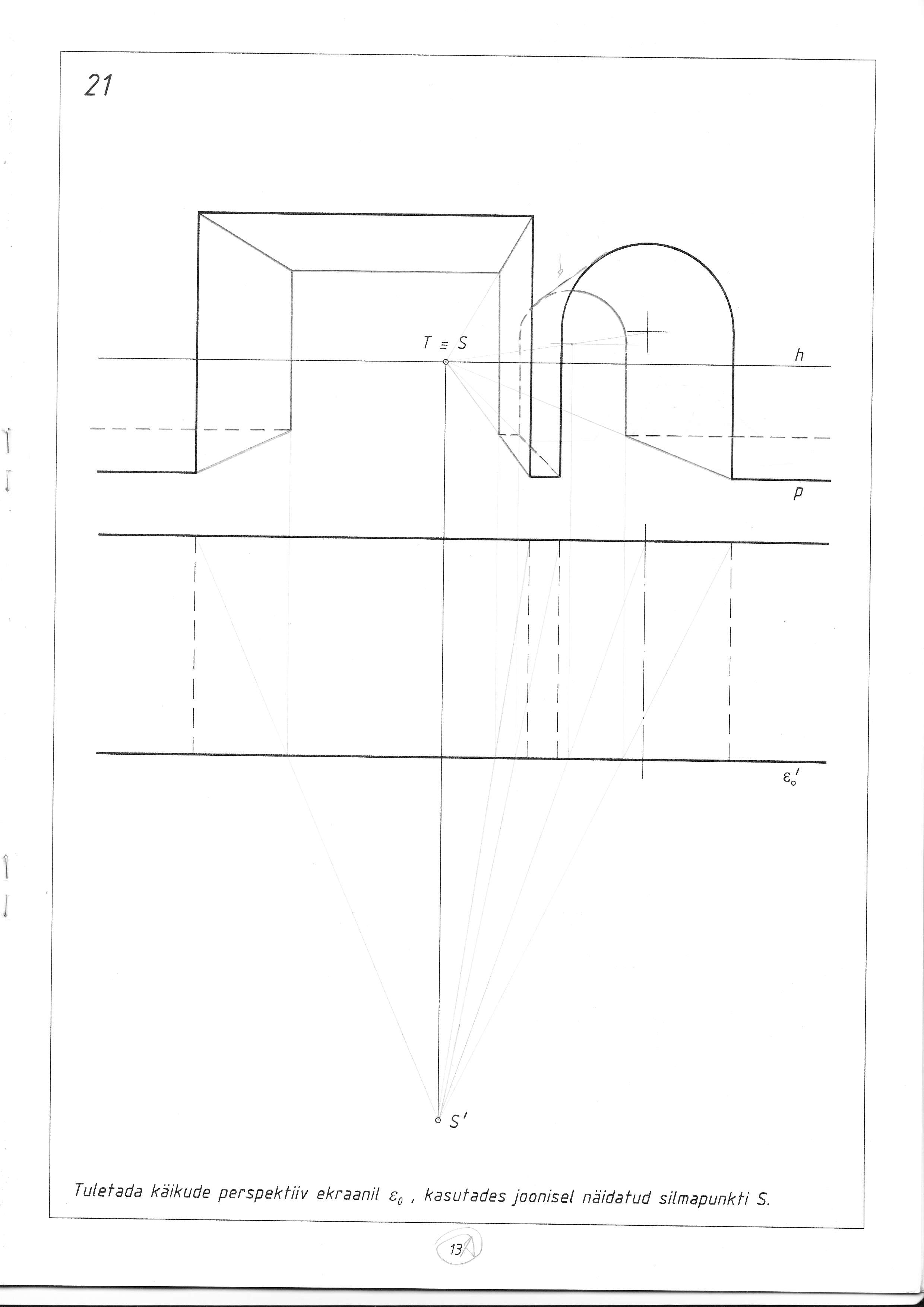
Tulefada kdikude perspekt'iiv
ekraanil eo , kasufades jooniset ndidafud silnapunkti S.
@ d t\ ,i
F,'a /2
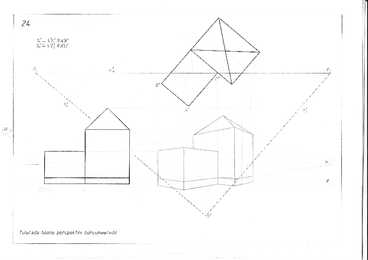
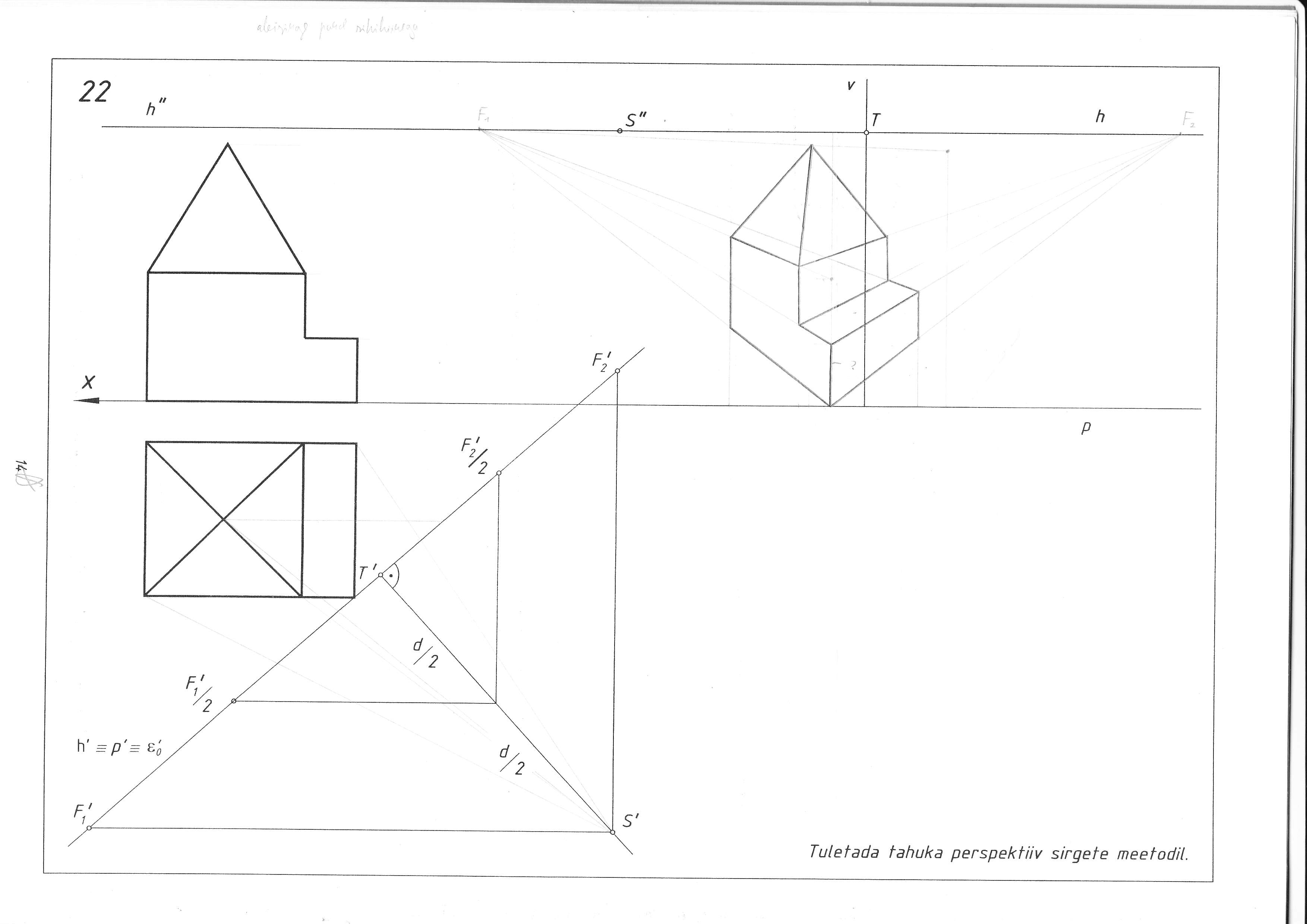
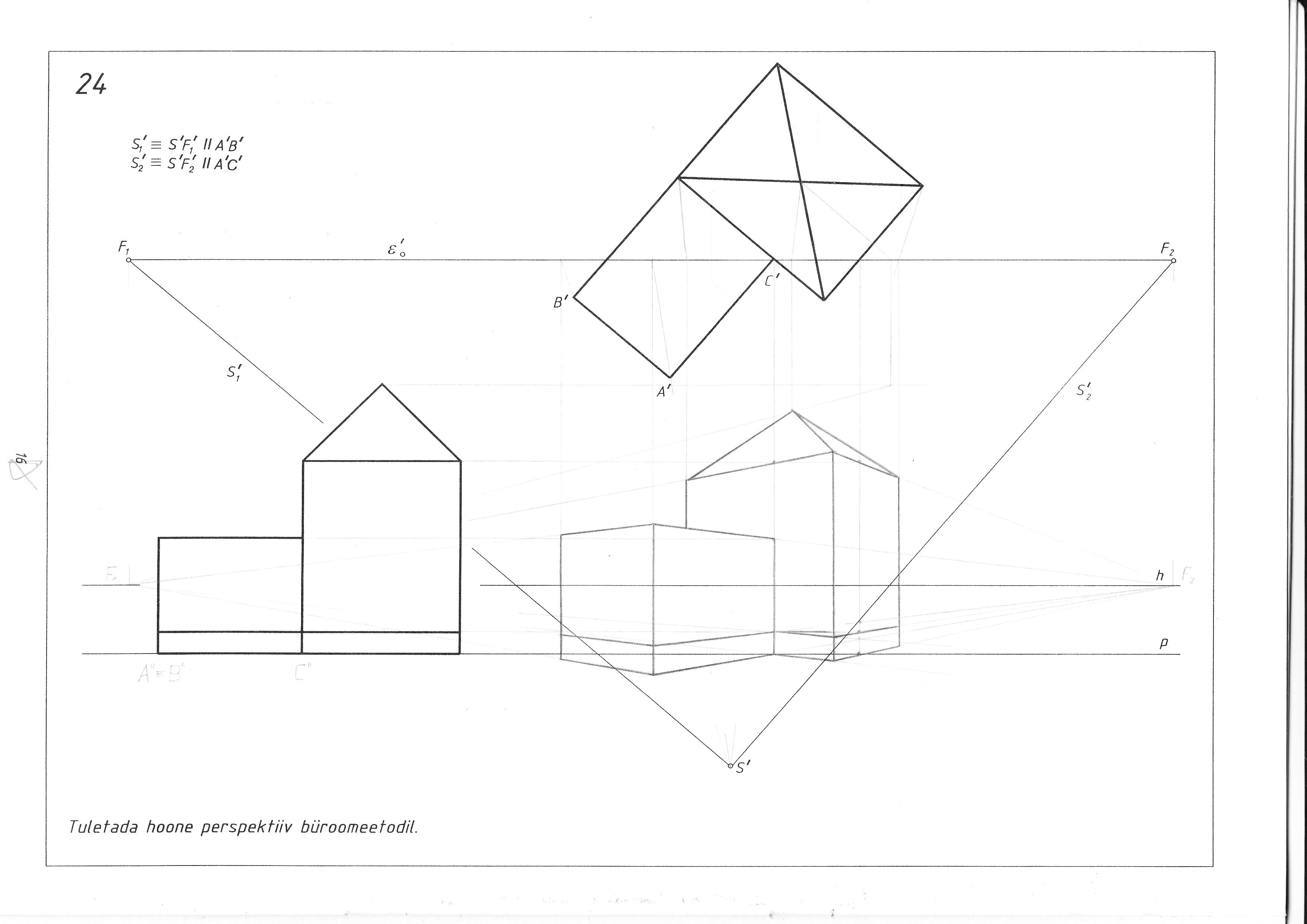
Tuletada tahuka perspektiiv sirgete neetodil. si = s'Fi IIA'B' si = s'ri IIA'c'
tet z
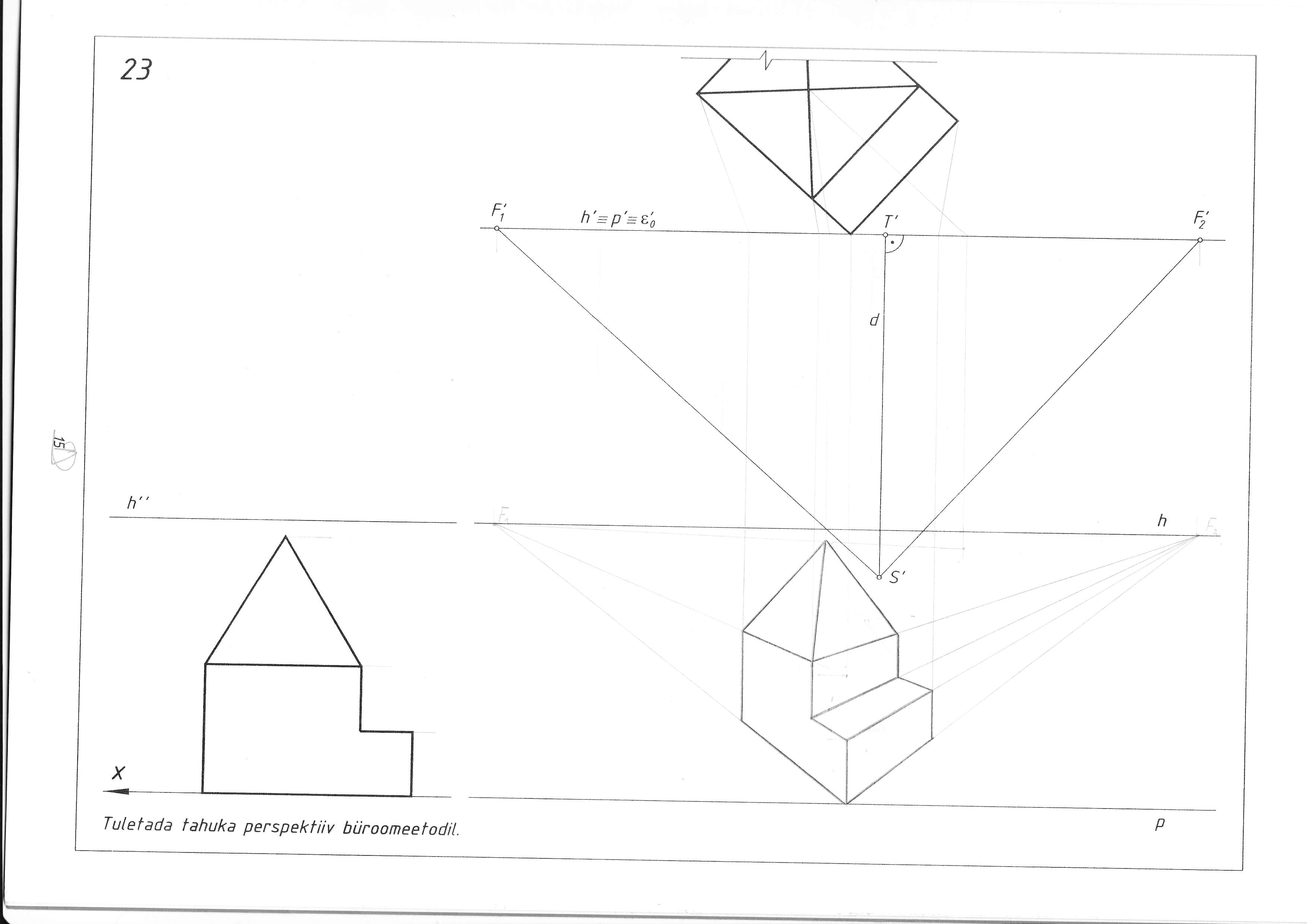
Tu[etada hoone perspektiiv btiroomeetodil. 25
D d
h'=P -- (;0
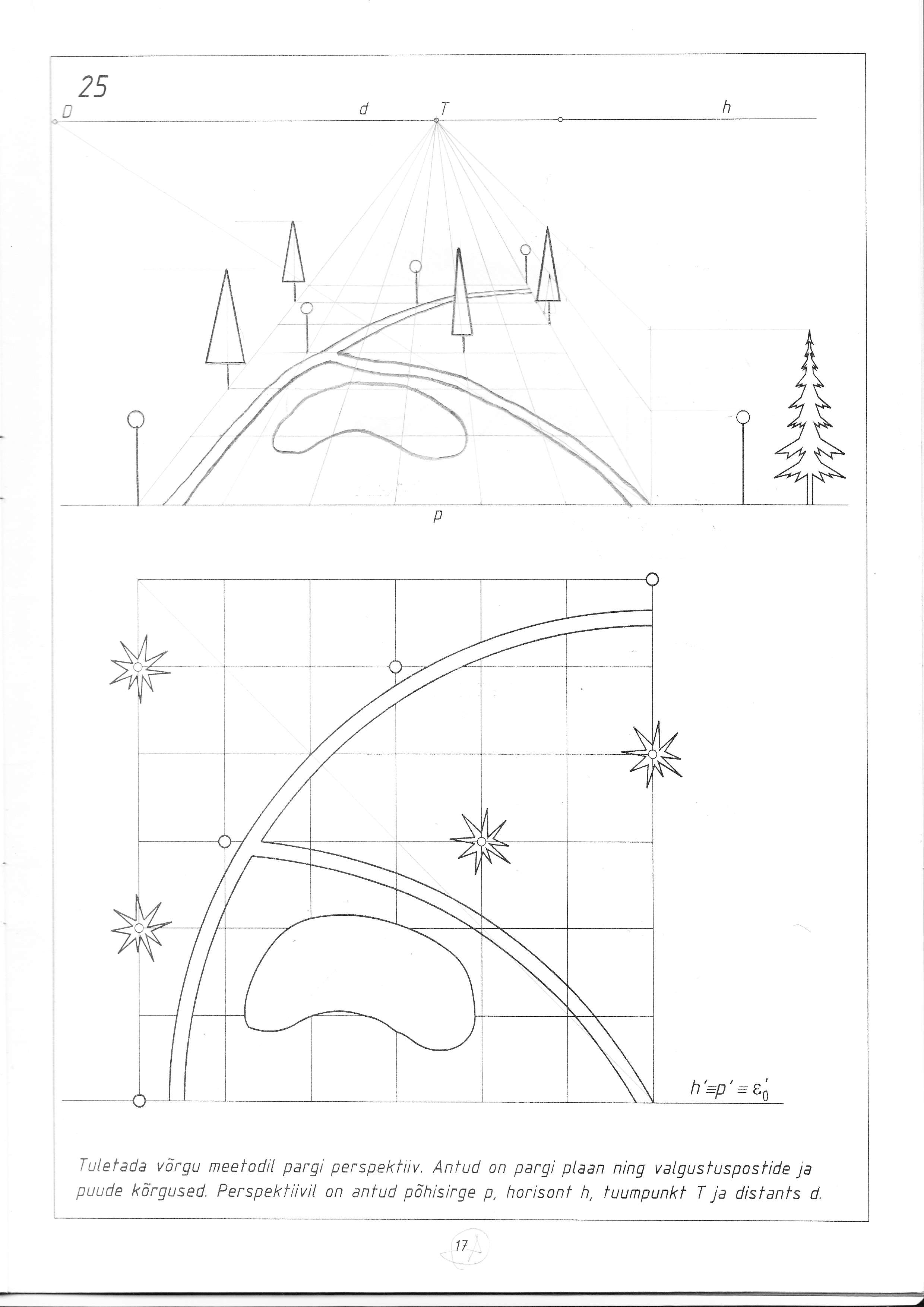
Tulet'ada vdrgu meet'
odil pargi perspekt'riv, Ant'ud on pargi plaan ning valgusf usposf ide ja puude kdrgused. Perspekfiivil on antud pdhisirqe p, horisont' h, tuumpunkf T ja disfanfs d. rs
\e;
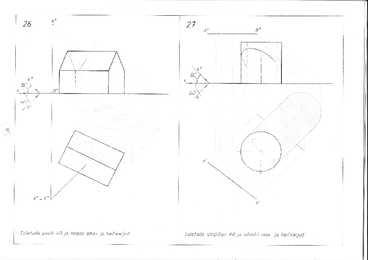
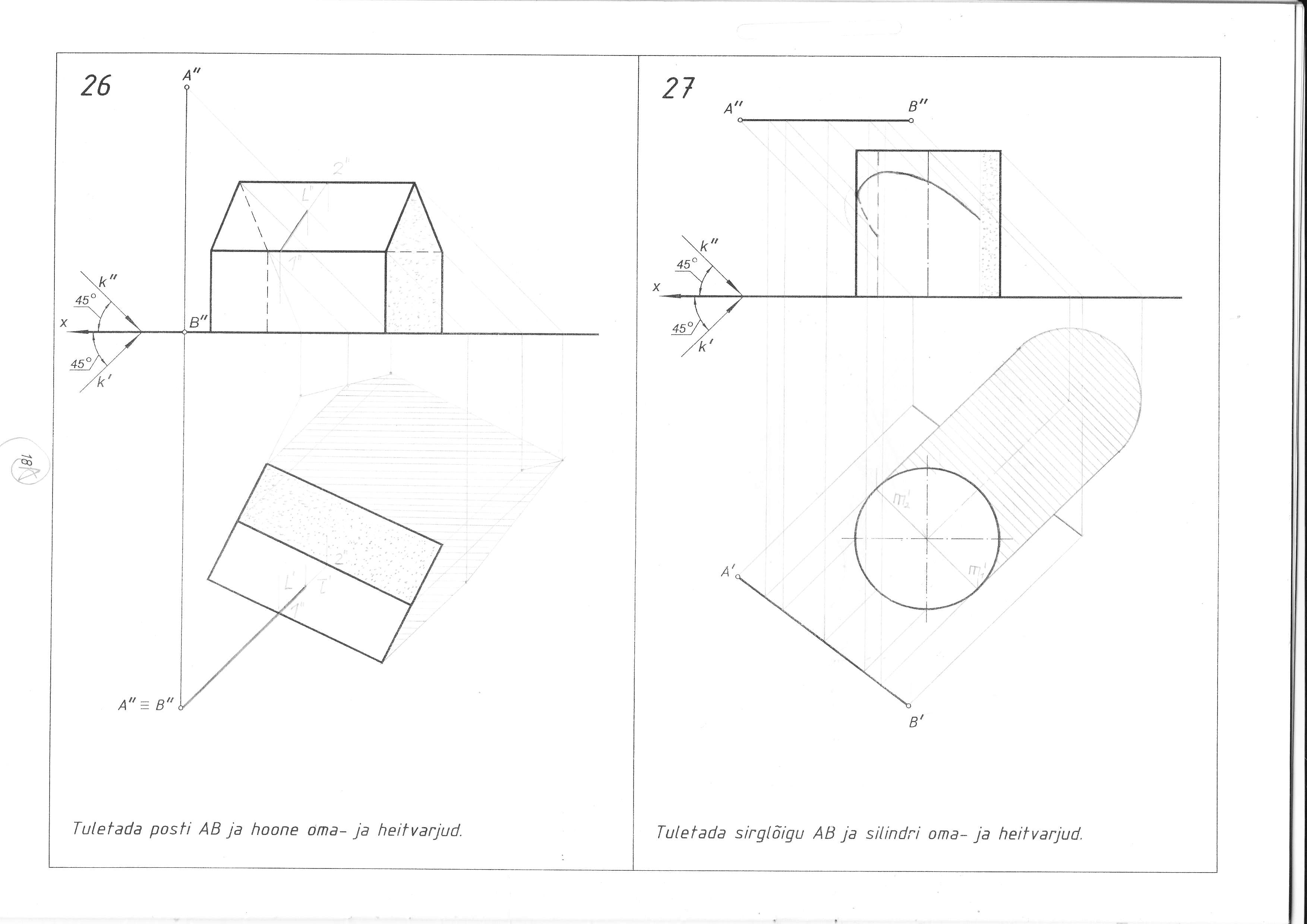
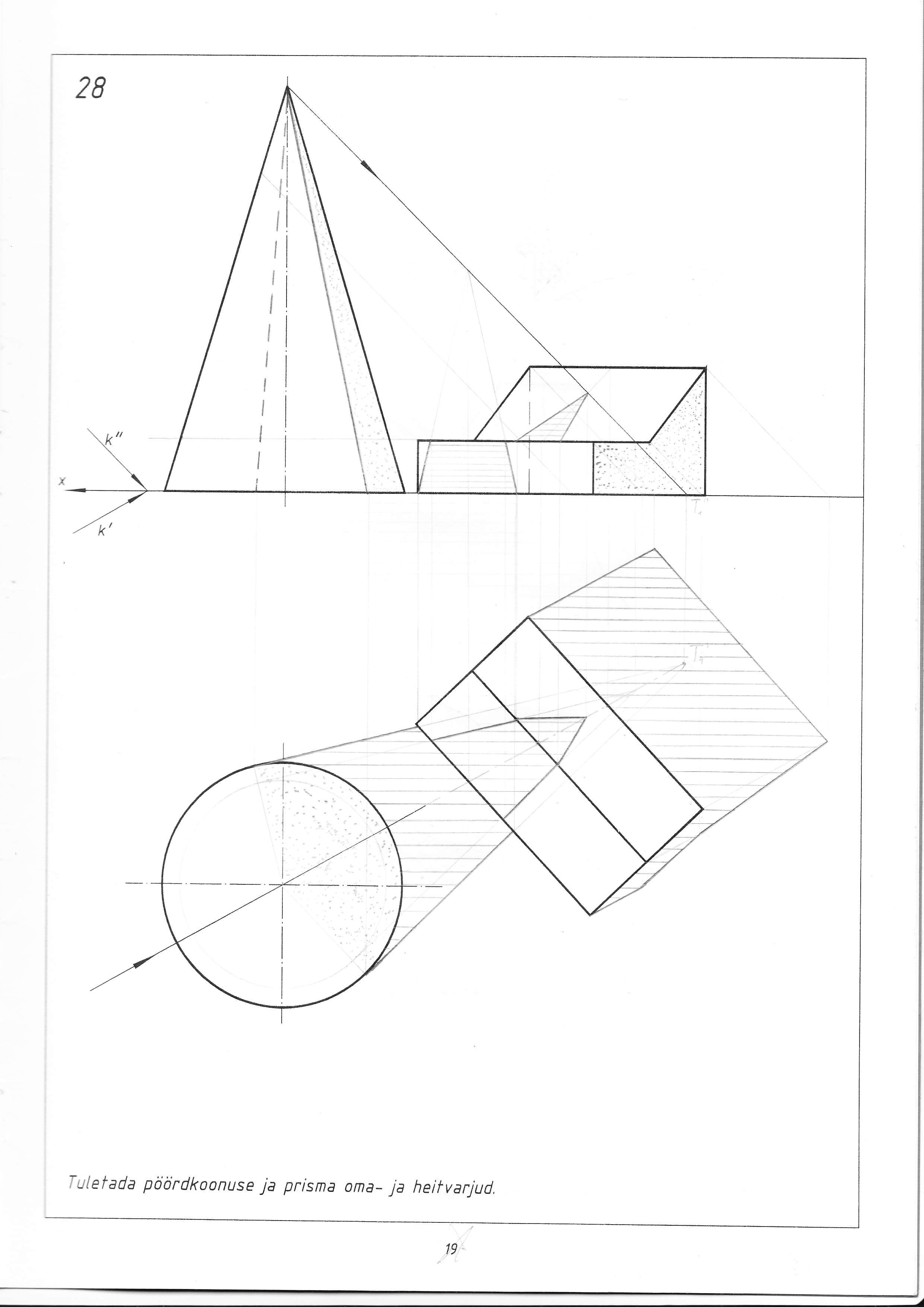
Tulefada posti AB ja hoone dna- ja heitvarjud. TuIetada sirgl6igu Ats ja silindri oma- ja heitvarjud. Tulet'ada pcicirdkoonuse ja prisna ona- ja heitvarjud, Tuletada
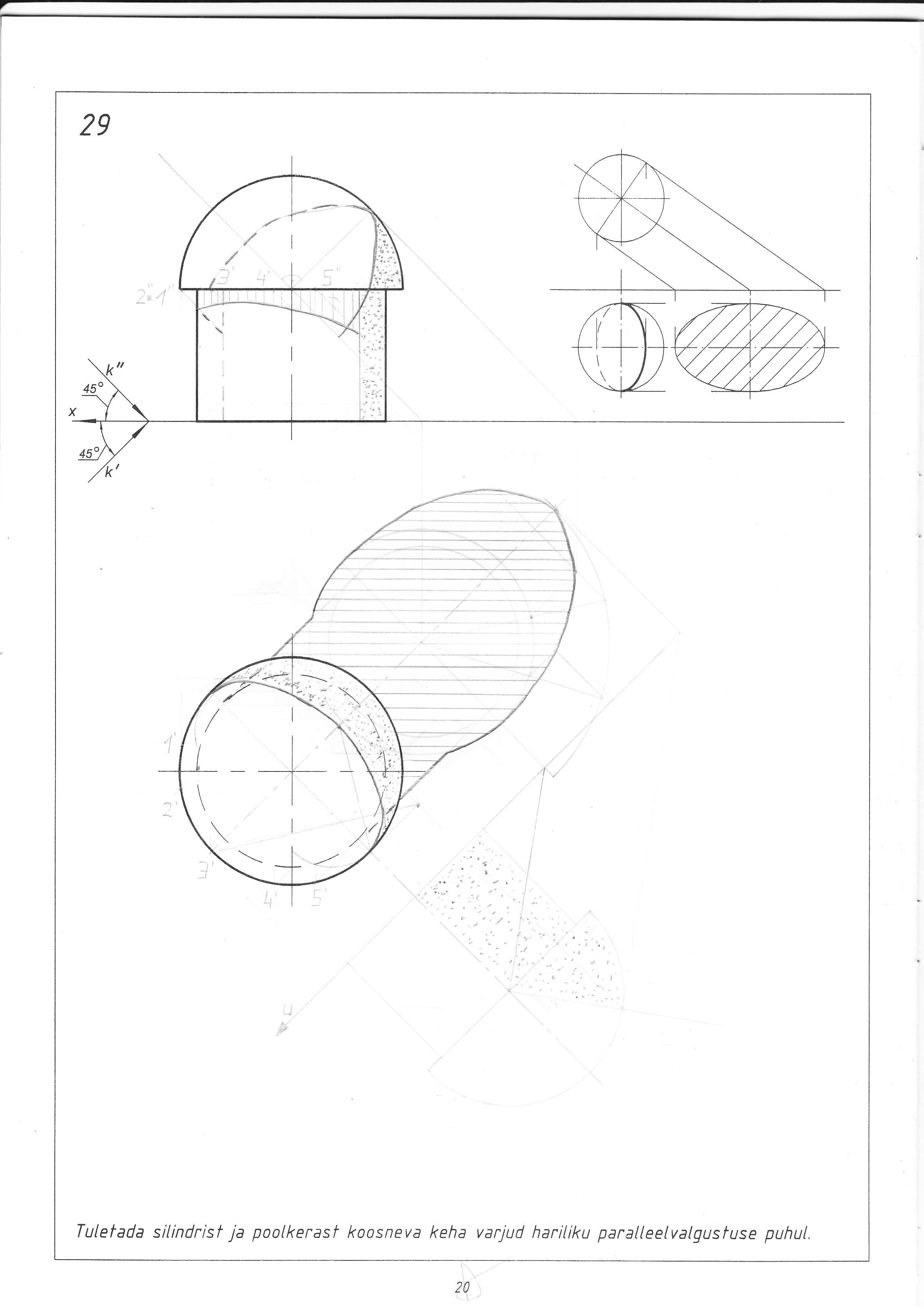
silindrist ja poolkerasf
koosneva keha
varjud hariliku paralleelvalgust'use puhul.
20. 30
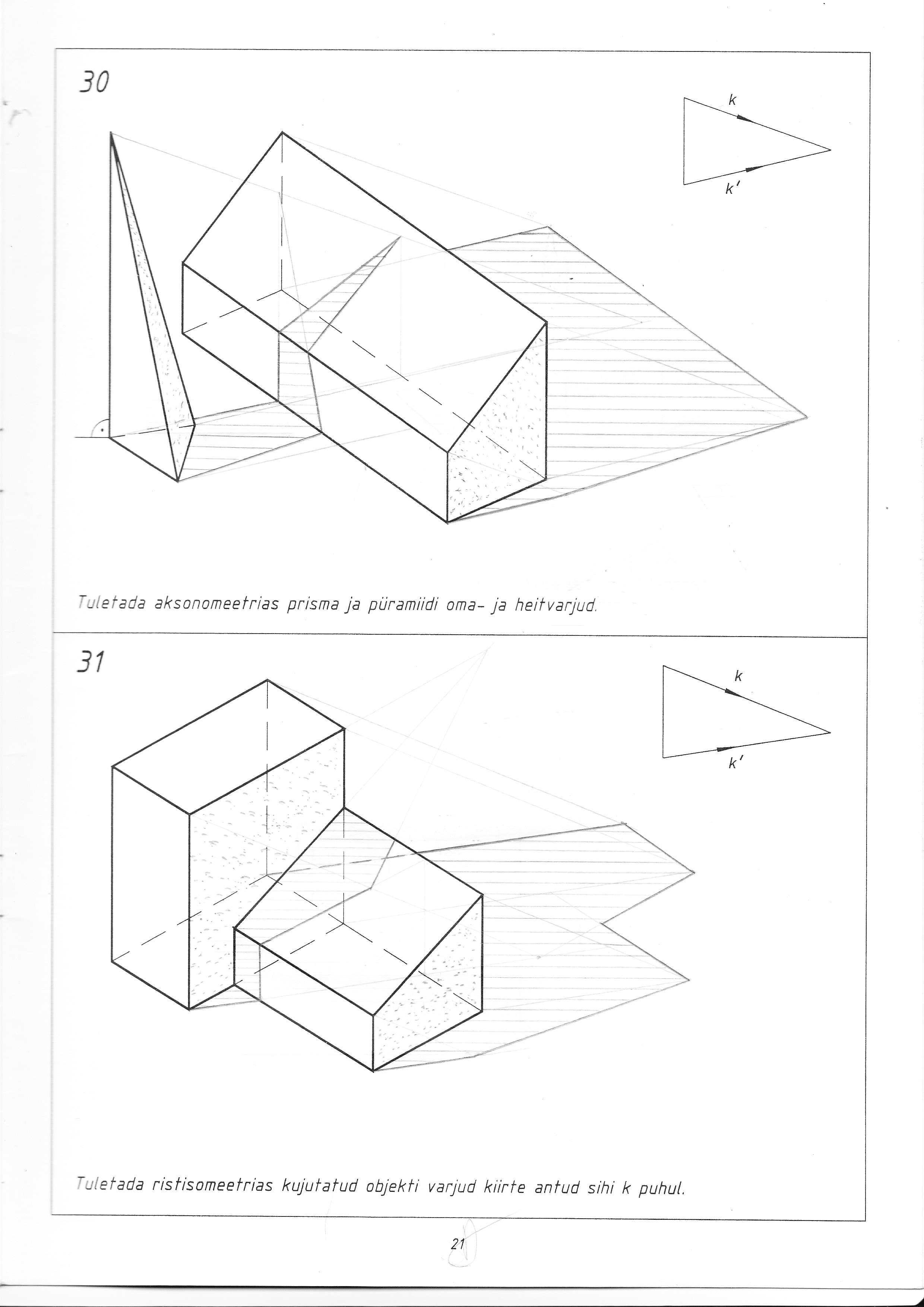
Tulet'ada aksononeet'rias prisna ja pllraniidi ona- ja heif varjud.
3t
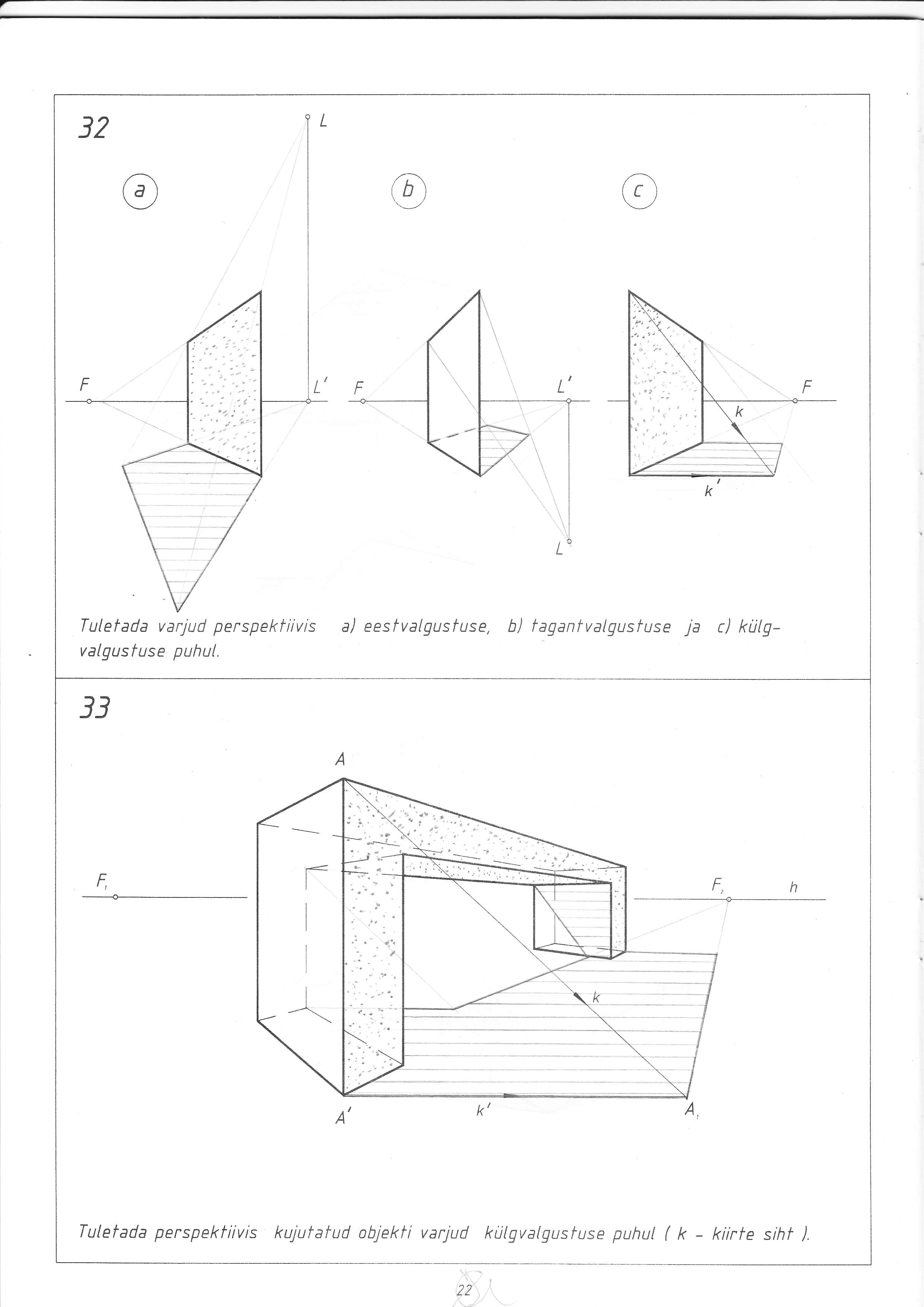
Tuletada risfisomeefrias kujut'at'ud objekt'i varjud kiirte antud sihi k puhul, Tulef ada varjud perspektiivis a) eest'valgusfuse, b) t'aganfvalgust'use ja c)
kiilg -
valgust'use puhul.
33
F
Tulefada perspekfiivis kujutat'ud objekt'i varjud ktilgvalgusfuse puhul (k - kiirfe sihf ).
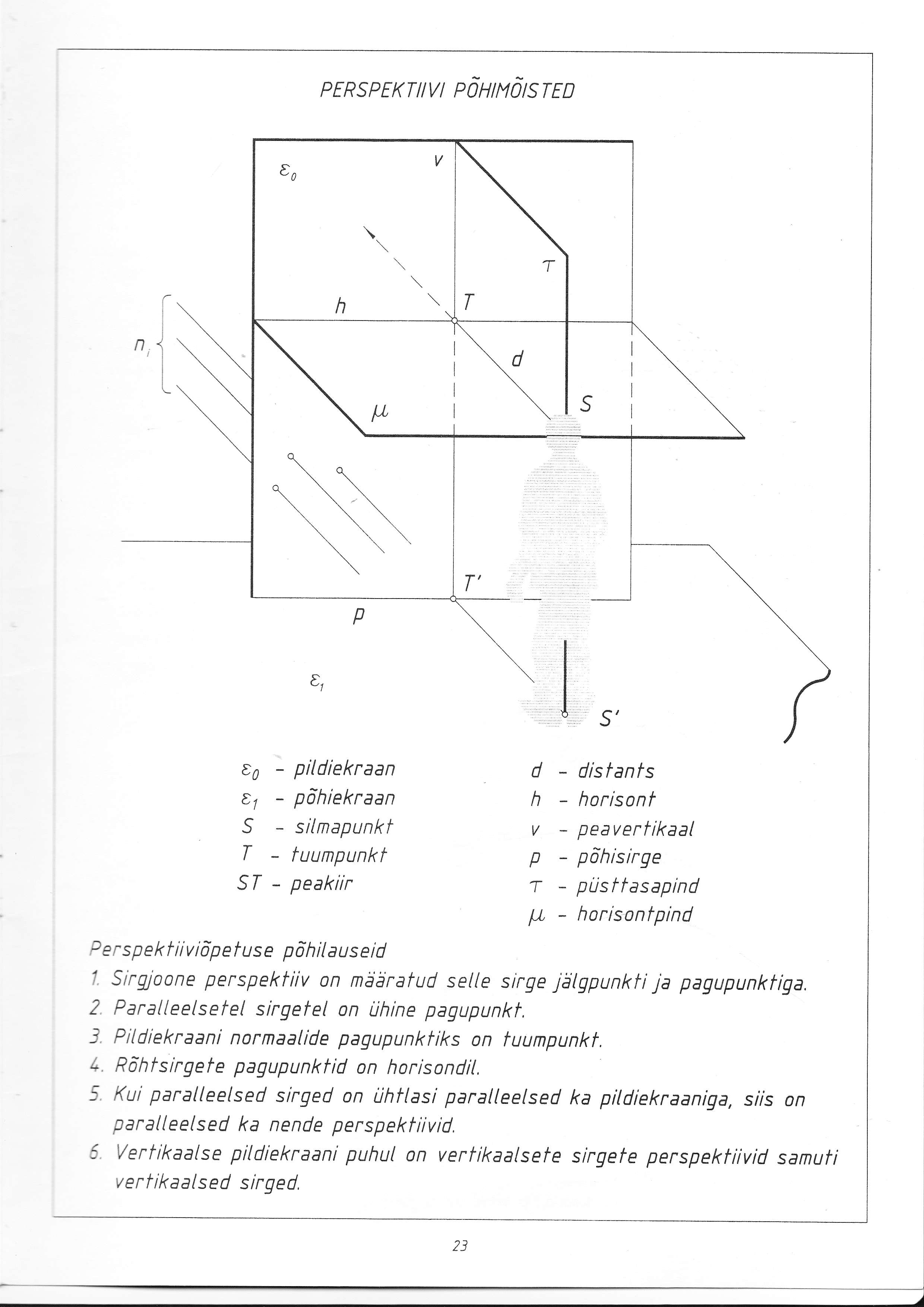
11 PERSPEKTIIVI POHIMOISTED
I
I
si I
t6 - pildiekraan d - disfanfs t1 - pdhiekraan h - horisonf S - si[napunkt v - peavertikaal T - fuumpunkf p - pdhisirge Sf - peakiir T * ptlsttasapind l-L - horisontpind
Perspekfiividpefuse pdhilauseld
l. Sirgloone perspekfiiv on nddrafud selle sirge jitgpunkfi ja pagupunkfiga,
2. ParaIteeIsefel sirgetel on ihine pagupunkf.
3. Pildiekraani nornaaIide pagupunkfiks on fuunpunkf,
4, Rdhfsirgete pagupunkfid on
horisondil 5. Kui paralleelsed sirged on iihftasi paralleelsed ka pitdiekraaniga, siis on paraileelsed ka nende perspektiivid.
6. VertikaaIse pildiekraani puhul an verfikaalset'e sirgefe perspektiivid samufi verfikaalsed sirged,





























Kõik kommentaarid