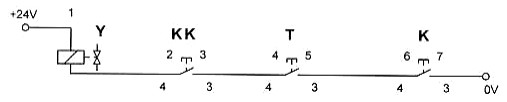
LELOL Praktiline töö PN5 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1. Tööülesanne Vastata antud küsimustele. PN5.H1 Küsimused: 1. Kui lüliti S on mõjutatud, seade ei käivitu. Miks? 2. Reguleerida aegrelee abil kolvi seisuaega plussasendis. Hinnata seisuaja reguleerimist täpsuse ja ülevaatlikkuse seisukohalt. Milline on kommentaar? 3
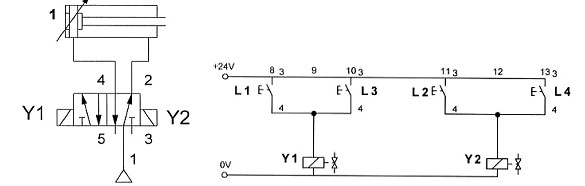
LELOL Praktiline töö EP4 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1.Tööülesanne Vastata antud küsimustele. EP4.H1 Küsimused: 1. Kas seade töötab vastavalt eelpool püstitatud nõuetele? 2. Milleks on tarvilik NA kontakt K1.2 paralleelselt käivitiga ST? 3. Milline on asendianduri TK ülesanne seadme juhtimisel? 4
LELOL Praktiline töö EP2 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1.Tööülesanne Vastata antud küsimustele. EP2.H1 Küsimused: 1. Mida oleks tarvis muuta, et seade jääks pidevalt töötama kuni peatamiskäsuni? Vastused: 1. Pannes nupplüliti ST asemele fikseeritav lüliti. Sele EP2-1 EP2.H2 Küsimused: 1
Ja vaevalt et enamikule arvutioperaatoreist pakub lähemat huvi mikroprotsessorite ehitus Tehniliste seadmete ja tehnoloogiaprotsesside juhtimisel on riist- ja tarkvaraprobleemid sageli spetsiifilised ning üldlahendid puuduvad. Programmeerijalt eeldatakse riistvara ehituse tundmist. Tööstuslikku juhtimissüsteemi projekteeriv insener peab aga tundma mikrokontrollerite spetsiifilisi detaile, sisend-väljundliideste omadusi ja mälu ning protsessori töö iseärasusi. See on põhjus, miks automaatikasüsteemide insener vajab algteadmisi mikroprotsessortehnikast. Digitaal- ja mikroprotsessortehnika on kahtlemata üheks tänapäeva insenerihariduse nurgakiviks. Digitaaltehnika aluste omandamine annab üliõpilasele võimaluse paremini mõista seda, kuidas funktsioneerib nüüdistehnika ja tehnoloogia; aitab mõista tehnika arengut ning inimese ja tehnika vahelist suhet nüüd ja tulevikus; arendab süsteemset
Aritmeetikatehete operandide ja tulemuste salvestamise jaoks on otstarbekas kasutada registreid ning suunamised registritest ALU sisenditesse ja ALU väljundist registritesse teostada multipleksorite ja demultipleksorite abil. ALU väljundsignaale liitmisel või nihutamisel ülekandena kõrgeimast bitist tulevad CO (carry out) ja madalaimast bitist allapoole väljanihkuvad LSB-d (last significant bit) saab kasutada sisendsignaalidena CI (carry in) ja MSB (most significant bit) ALU töö samal sammul. Näiteks CO suunamisel CI-sse realiseerime ringülekande, LSB suunamisel MSB-sse toimub ringnihe jne. CO ja MSB väärtusi võib salvestada ka trigerite abil ja kasutada ALU töö järgmisetel sammudel. Peale selle on osutunud otstarbekaks registreerifa tehte tulemuse muidki tunnuseid, milledest tähtsamad on ületäitumine, mis paljudel juhtudel vastab CO-le, nulltulem, negatiivne tulem, väljanihkunud biti väärtus C jt.
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta
käsijuhtimisaparaatide abil; automatiseeritud elektriajam inimese osavõtt juhtimises piirdub alg- juhtimiskäskluse andmisega, edaspidised juhtimistoimingud teevad mitme- sugused elektromehaanilised või muud elektriaparaadid (releed, kontaktorid, kontaktivabad loogikaelemendid, pooljuhtlülitid jne); automaatelektriajam kõik juhtimistoimingud teevad automaatjuhtimis- aparaadid, inimese osavõtt piirdub elektriajami töö jälgimisega. Elektriajami juhtimiseks kasutatavate signaalide arvu järgi liigitatakse tema juhtimissüsteemid järgnevalt: avatud juhtimissüsteemid juhtimiseks kasutatakse ainult üht juhtimissignaali, mistõttu juhtimistoime ei sõltu juhtimistulemusest puudub igasugune kontroll juhitava suuruse (kiirus, moment, võimsus vm) üle; suletud juhtimissüsteemid (joonis S1) juhtimissignaali moodustamiseks



















Kõik kommentaarid