Tallinna Tehnikaülikool Mehhatroonikainstituut trollolloo Kodutöö S-2 Variant nr 11 Jäiga keha toereaktsioonide leidmine tasapinnalise jõusüsteemi korral Tallinn 2011 Variant 11. 1) Lisan x,y teljestiku, avaldan Q . Q= l*lq Q= 0,5*4=2kN Y X I 1) Leian X'i projektsioonide võrrandi. Et on 45 kraadi ning on täisnurk, eeldan, et kui jõule P joonistada täisnurkne kolmnurk nii, et P on hüpotenuusiks tekib nurk : 2, mis on 45
Non-Commercial Use Only Ehk jõudude resultant asub IV veerandis. Teostan lahendi õigsuse kontrolli: 2 2 ⎛⎝cos ⎛⎝αF⎞⎠⎞⎠ + ⎛⎝cos ⎛⎝βF⎞⎠⎞⎠ = 1 2 2 (cos (112.2°)) + (cos (22.4°)) = 0.9975 Vastus on ligikaudu 1, seega lahendus on õige. Non-Commercial Use Only TASAPINNALISE KOONDUVA JÕUSÜSTEEMI TASAKAAL Kodutöö 15 α = 30° β = 90° γ = 45° P = 30N nurk Rb ja x-telje vahel: β − 2 α = 90° − 60° = 30°
Tallinna Tehnikaülikool Mehhatroonikainstituut jeje Kodutöö S-13 Jäiga keha toereaktsioonide leidmine ruumilise jõusüsteemi korral Tallinn 2011 Variant 11. Horisontaalne kolmnurgakujuline plaat ABD kaaluga 240 N on kinnitatud sfäärilise liigendiga A, silindrilise liigendiga B ja jäiga kerge vardaga KE. Punkti D on rakendatud sihis DB mõjuv jõud F, mille moodul on 150 N. Leida sidemete reaktsioonid punktides A, B ja E, kui AL = LB = l , AD = DB = 2l , KL = l 2 , AE = ED. Sirge KL on vertikaalne. Nurk = 26,565°
Tallinna Tehnikaülikool Mehhatroonikainstituut Kodutöö S-13 Jäiga keha toereaktsioonide leidmine ruumilise jõusüsteemi korral Tallinn 2011 Variant 11. Horisontaalne kolmnurgakujuline plaat ABD kaaluga 240 N on kinnitatud sfäärilise liigendiga A, silindrilise liigendiga B ja jäiga kerge vardaga KE. Punkti D on rakendatud sihis DB mõjuv jõud F, mille moodul on 150 N. Leida sidemete reaktsioonid punktides A, B ja E, kui AL = LB = l , AD = DB = 2l , KL = l 2 , AE = ED. Sirge KL on vertikaalne. Nurk = 26,565° 1)
Tallinna Tehnikaülikool Mehhatroonikainstituut ............ .......... ........... ............. Kodutöö S-2 Jäiga keha toereaktsioonide leidmine tasapinnalise jõusüsteemi korral Tallinn 2007 F1 X = -F sin 30° F2 X = -F cos 60° 1 KD = BD F1Y = -F cos 30° F21Y = -F sin 60° 2 Q = q l q = 2 4 = 8kN Tasakaaluvõrrandid: n 1) F i =1 iX = 0 : X A + N C - F1 sin + F2 cos = 0 n 2) F i =1
TALLINNA TEHNIKAÜLIKOOL EHITISTE PROJEKTEERIMISE INSTITUUT Kursuseprojekt aines EER 0012 RAUDBETOONKONSTRUKTSIOONID I - PROJEKT ÜLIÕPILANE: JUHENDAJA: TÖÖ ESITATUD: TÖÖ ARVESTATUD: Tallinn, 20.. Sisukord 1 Plaadi arvutus 3 1.1 Koormused plaadile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Talade m~ o~ otude valimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.3 Arvutuslikud avad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.4 Plaadi sissej~ oud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.5 Plaadi armatuuri dimensioneerimine . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.5.1 Esim
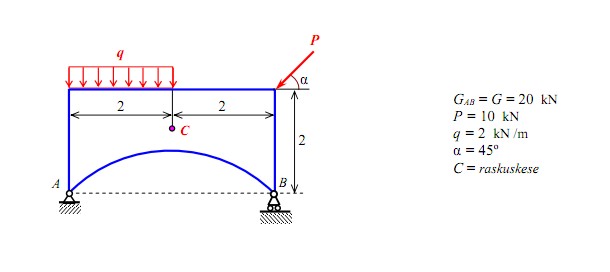
Tallinna Tehnikaülikool Mehhatroonikainstituut Kodutöö S2 Variant 1 Õppejõud: Leo Teder Üliõpilane: Matrikli number: Rühm: MAHB52 Kuupäev: 18.11.2012 Tallinn 2012 Lahendus Jõudude skeem: Q = q lq = 2kN Tasakaaluvõrrandid: 1) kõikide jõudude projektsioonide summa x-teljele on võrdne nulliga n Fix = 0 i =1 , 2) kõikide jõudude projektsioonide summa y-teljele on võrdne nulliga n Fiy = 0
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(

















Kõik kommentaarid