TALLINNA POLÜTEHNIKUM Täiskasvanukoolituse osakond KEE-007 977 (rühm) (registri nr) (ees- ja perekonnanimi) Kontrolltöö (töö pealkiri) Elekriajamid (õppeaine) Kodutöö nr. 1 Juhendaja R. Kask Esitamine TPT-sse ............ 2009 Hinne ................. Kuupäev ............. Õpetaja allkiri ....................... Tallinn 2009 ÜLESANNE Nr. 1 (Variant 7) Määrata pikkihöövelpingi töölaua mehhanismi taanadatud inertsimoment. Mehhanismi kinemaatiline skeem on kujutatud joonisel 1.1 Andmed tabelis 1.1 Joonis 1.1 Tabe
10 520 5,4 2 + (5,4 2 + 5,4 2,9 + 2,9 2 ) + 2,9 2 180 3 3 kW Pekv = = 3,90 10 + 520 + 180 Standardsed lühiajalise töö kestused, mille jaoks valmistatakse elektrimootoreid on 10, 30, 60 ja 90 min. Töötsükli kestus on t ts = 10 + 520 + 180 = 710 s = 11,83 min. Kui loeme tegeliku töö kestuse ligikaudu võrdseks standardse töö kestusega 11,83 10, siis võime kohe valida elektrimootori lühiajaliste mootorite kataloogist (S2) tingimuse Pnl Pekv, tst = 10 min järgi. Kui meil lühiajalise töö mootorite kataloogi ei ole, siis valime kestva töö mootori (S1), mida võime rohkem koormata
Kodune töö nr 2 Ülesanne 5.2 variant 5 Arvutada grafoanalüütilise meetodi abil alalisvoolu haruvoolumootori käivitusreostaat. Mootor on koormatud konstantse staatilise momendiga Tst=0,85Tn . Mootori andmed Mootori Nimi Nimivool Nimipinge Nimikasutegur Nimipöörlemissagedus tüüp võimsus Pn, In , A Un , V n, - nn, p/min KW -81 32,0 170 220 0,860 1500 I Loomulik tunnusjoon 1.Leiame tühijooksu tööpunkti.
muutum momendi muutuse suhtes vastasmärgiline, on jäikus negatiivne. Liigitus: Absoluutselt jäik karakteristik, millel =, see tähendab, kiirus ei sõltu koormusest. Selline karakteristik on sünkroonmootoril. Jäik karakteristik, mille puhul kiirus sõltub koormusest vähe. Sellesse rühma võib arvata mootorid, mille kiirus tühijooksust nimikoormuseni ei muutu rohkem kui 8...10% võrra, näiteks asünkroonmootor normaalse töö piirkonnas, samuti haruvoolumootor töötamisel normaalreziimis, ilma lisatakistuseta anksuahelas. Pehme karakteristik, mille puhul kiirus sõltub tugevasti koormusest. Sellist karakteristikutüüpi nimetatakse ka peavoolukarakteristikus, sest vaadeldava rühma mootorite tuntuimaks edisndajaks on alalisvoolu-peavoolumootor. 8. Mootorite elektrilise pidurduse meetodid 1. Rekuperatiivpidurdus, mille puhul ajami mootor töötab generaatorireziimis, andes
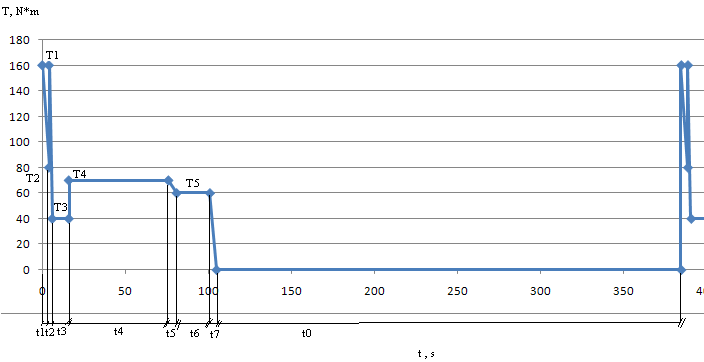
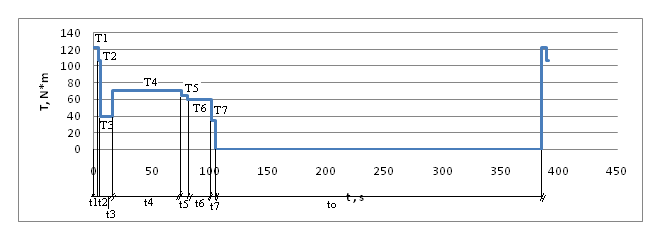
R − vedava trumli raadius, m (R = 0,1 m) Rh − hammasratta raadius, m Ts − soojenemise ajakonstant, s t − tsükli kogu kestus, s t1 − aeg teekonna läbimiseks söödahoidlast laudani, s t2 − mahalaadimiseks kuluv aeg, s (𝑡2 = 30 s) t3 − aeg ühest künast teiseni jõudmiseks, s t4 − aeg tagasi liikumiseks väravani, s t5 − aeg tagasi liikumiseks söödahoidlani, s ti − i-nda lõigu kestus, s tl − töö kestus ilma pausideta, s (𝑡𝑙 = 240 s) V − hammasratta ruumala, m3 W − takistusjõud, N Wh − liikumistakistus, N x − astmenäitaja, milleväärtus sõltub töömasina liigist (x=2) xk − koormustegur, 𝑥𝑘 = 𝑃𝑒𝑘𝑣 /𝑃𝑛 xl − lubatav ülekoormatavus α − tegur, mis arvestab pingekadu α = 1,4 γ − kaotegur (püsiv- ja muutuvkadude suhe), 𝛾 = 0,7 δ − materjali tihedus (𝛿𝐹𝑒 = 7874 kg/m3)
..100 Tähendused: A – hea, ebaoluline; B – keskmine, harilik; C – kehv, oluline; Joonis 2.2. Mõnede täiturmehhanismide võrdlus jõu ja kiiruse järgi [1] 2.2. Automaatsüsteem Mõiste automatiseeritud süsteem (automated system) võeti kasutusele kirjeldamaks tehnilist süsteemi, kus masinatele on usaldatud otsustusõigus. Tehniliste süsteemide all mõistetakse seadmete kogumit, mis töötavad koos töö eesmärgi saavutamiseks. Kui süsteem ei vasta soovitud tingimustele, siis tuleb seda mõjutada selliselt, et süsteem soovitud tingimustele 8 vastama hakkaks. Kui süsteem suudab iseseisvalt neid mõjusid rakendada, ilma inimest kaasamata, on tegemist automaatjuhtimissüsteemiga [3]. Automaatjuhtimissüsteemid jagunevad kaheks: avatud kontuuriga süsteemid (open loop
3 või enama haru Asünkroonmootori ehitus: staator(koosneb välisest teraskerest, millesse on pressitud uuretega kalvaanilist ühenduskohta nim sõlmeks. Kui pinge ja vooluvaheline sõltuvus on lineaarne siis nim staatorisüdamik, mis koostatakse stantsitud terasplekist), rootor(koosneb terasplekkidest on mähitud) lineaarseteks vooluringiks. Suletud vooluringis eksisteerib vool kui eksisteerib potentsiaalide vahe e pinge 19. Asünkroonmootori tööpõhimõte- Töö põhineb pöördmagnetvälja ja rootori voolu vastastikusel toimel. alikate klemmidel. Vool kulgeb vooluringis alati kõrgemalt madalamale potensiaalile. Tarbijate koormust Pöördmagnetväli, mille tekitab kolmefaasiline vool staatorimähises, läbib õhupilu ja aheldub rootorimähisega. iseloomustab R ja seda alalisvooluringis nim oomitakistuseks
r'eguleeritrrine oļi veeļ
otstarbekas kiir.ust regtrleelida. Kuna asįįnkroolurrootori kiirr-rsę sujuv
kürnnrekond aastat tįasi väga tüiikas' lepiti ocįava lrįrma
ja iötlkirrcĮltlse iruvides erramikeĮ
julrtudel masitlate ebaīõhusa töö, rrradalanra kasuteņrri r,õi toodangLr lraļvetria kvaliteediga.
ntltudes tehnika-
Eclttsalrlnlud jõupooŲul-rtteļllikas, rnikroeļektroonikas, arvutt-lsteļrllikas .ļa
'lrat.r.tcles
ol] tänasel



































Kõik kommentaarid