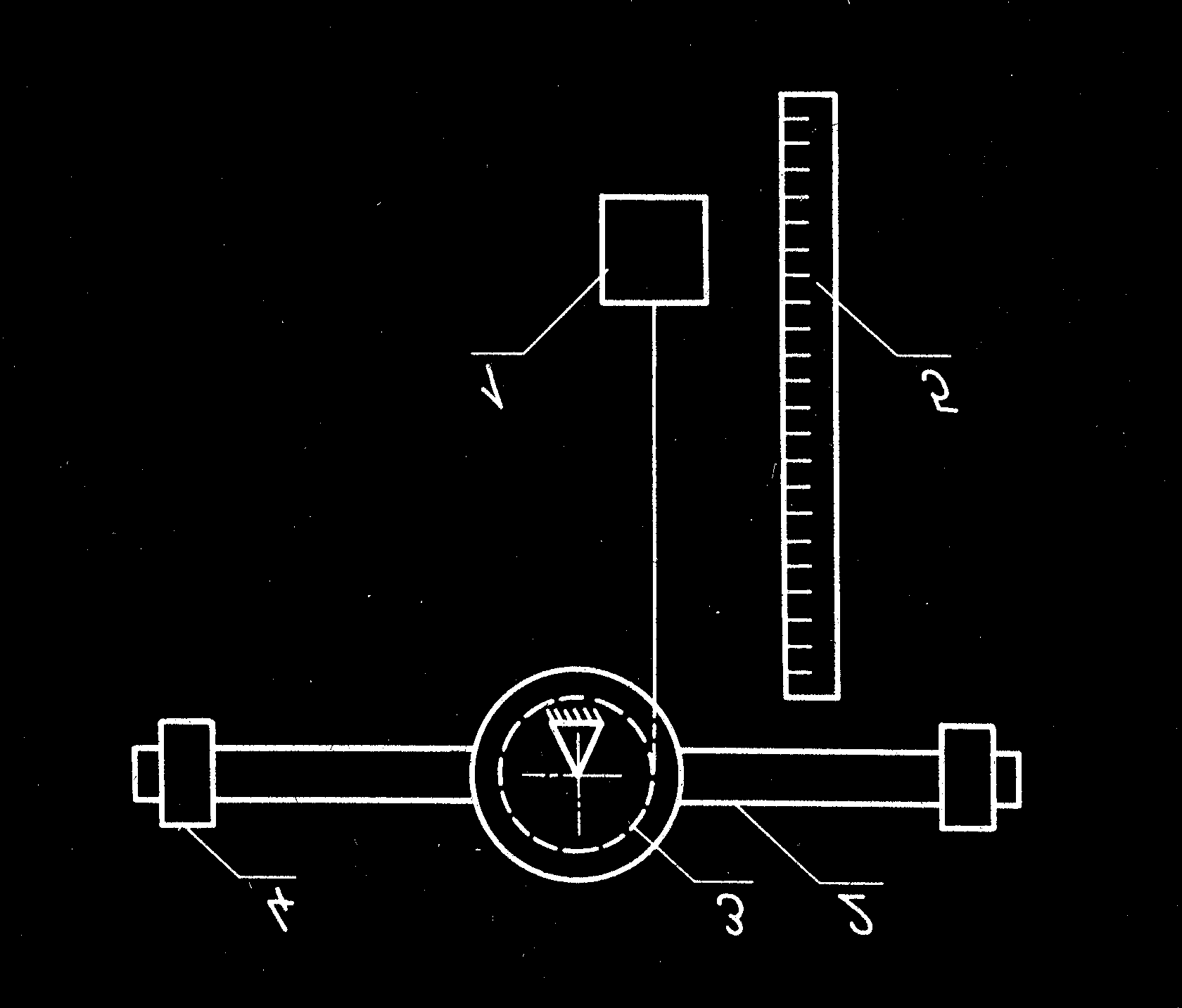
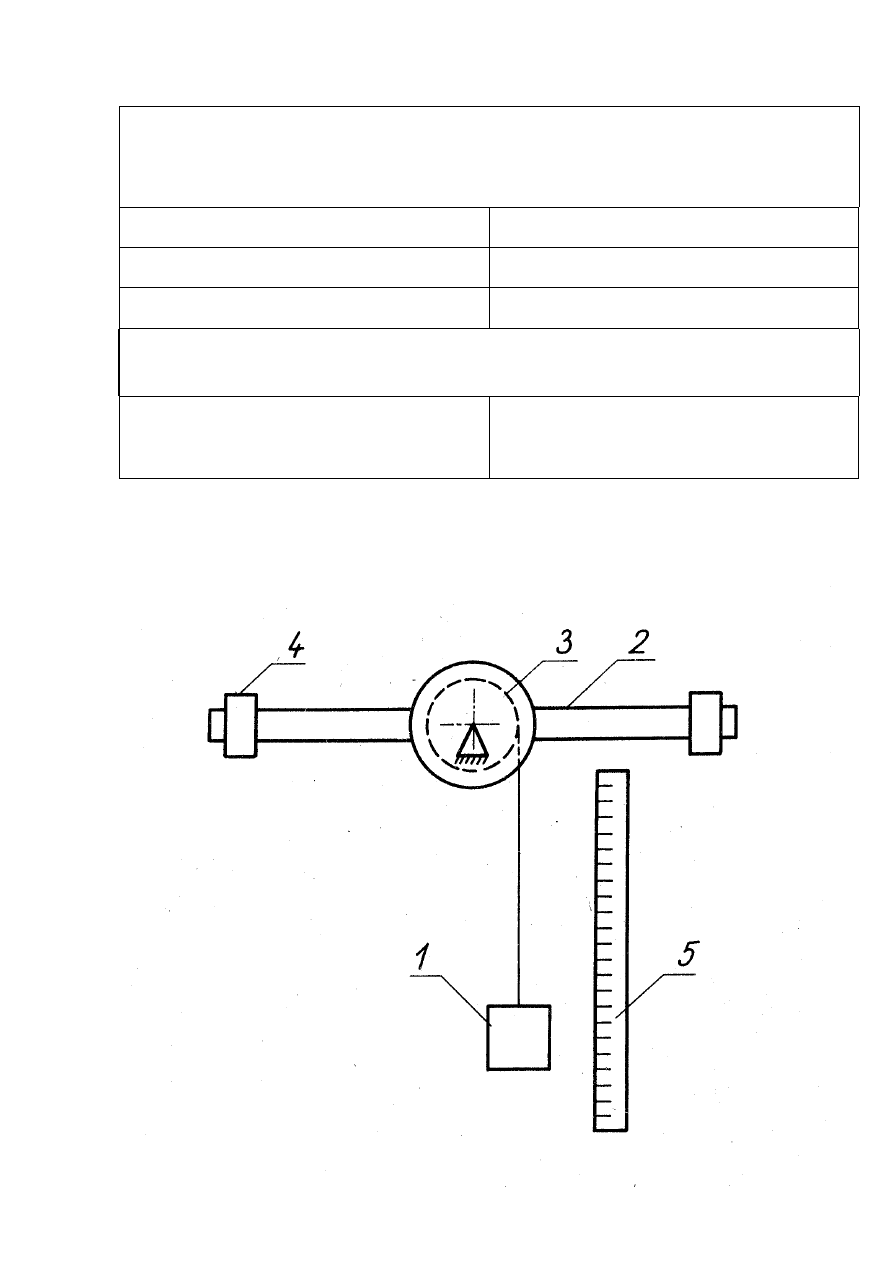
!"# $ %%& ' "(()* ++$,+-. %% /"%% %%$ 0 Katseandmete tabel Pöördliikumise dünaamika põhiseaduse kontroll. D = ......... ± ......... cm, no = ......... ± ......... cm, n1 = ......... ± ......... cm. Katse Mass Langemise aeg t, s nr. m, kg t1 t2 t3 t4 t5 t 1. 2. 3. 4. Katse Mass Skaala näit n2, cm nr. m, kg n21 n22 n23 n24 n25 n2 1. 2. 3. 4. h = no n1 = ......... ......... = ......... cm. h11 = no n 21 = ......... ......... = ......... cm. h12 = no n 22 = ......... ......... = ......... cm. h13 = no n 23 = ......... ......... = ......... cm. h14 = no n 24 = ......... ......... = ......... cm. Arvutused ja veaarv
Pöördliikumise dünaamika kontroll D = 40,00 ± 0,05 mm , n0 = 144,0 ± 0,5 cm , n1 = 33,0 ± 0,5 cm , m a = 61,40 ± 0,05 g Katse Mass Langemise aeg t , s Skaalanäit n2 , cm nr. m, g t1 t2 t3 t4 t5 t n 21 n 22 n 23 n 24 n 25 n2 1 156,5 9,78 9,75 9,77 9,73 9,73 9,752 47 48,5 47,5 47,5 49 47,9 0 2 200,3 8,68 8,67 8,69 8,70 8,71 8,690 46,5 46 47 46 45,5 46,2 0 3 295,2 7,36 7,34 7,35 7,36 7,37 7,356 45,5 45,5 46 46 45,5 45,7 0 4 326,2 7,00 7,02 7,01 6,96 6,95 6,988 45 45 44,5 45 45 44,9 5 m1 = 61,40 ± 0,05 + 95,10 ± 0,05 = 156,50 ± 0,10 g m2 = 61,40 ± 0,05 + 95,10 ± 0,05 + 43,80 ± 0,05 = 200,30 ± 0,15 g m3 = 61,40 ± 0,05 + 95,10 ±
EESTI MAAÜLIKOOL Tehnikainstituut Madis Vitsut RIPPVAGONETI ELEKTRIAJAM Kursuseprojekt õppeaines „Tehnoloogiaseadmete elektriajamid” TE.0023 Energiakasutuse eriala EK MAG II Üliõpilane: “ “ 2016. a. ………… Madis Vitsut Juhendaja: “ “ “ 2016. a. ………… lektor Erkki Jõgi Tartu 2016 SISUKORD TÄHISED JA LÜHENDID ........................................................................................................ 3 SISSEJUHATUS ........................................................................................................................ 5 1. TEHNOLOOGIA KIRJELDUS ................................
TALLINNA TEHNIKAULIKOOL Ehitusmaterialid Laboratoorne tOii nr. 8 2007t2008 Soojusisolatsioonikatsetamine 1. Tci6eesmdrk VahtpoliistiteentoodetetnhistuseDniiranine lahtuvalt m66tmtestm66tmete tolerantsidest,swvepingestl0% defomErsioonil,paindetugeersesija sooiuseriiuhti!,usesl 2. Katsetatavadmaterjalid Vahtpolustiireenmate{alid: . paisutatudpotiistiiEen EPS . ekstruuderpoliistiireenXPS 3. Kasutatavadseadmedja vahendid 0,02mm,m66dulinttipsusga0,5 co, kaal upsusega0,19 h0drauliline Nihik tApsusega press,immutamiseksvajalikud n6ud. 4. Tatdkaik 4.'l M66tmetemeeramine 4.1.1Nimimd6tuetega:oote pikkuse.laiusemaaraminevastavaltstandadile EVS EN 822:1999"Ehituseskasutataladsoojustusmaterjalid. Pikkuseia laiusemddramine." Katsekehihoitakseennekatsealustamistvahellalt 6 tmdi temperatuuril(23 : 5fC. Katsedviiakse hbi temperduuril (23 -+5)t. Tasaselepinnaleasetatudkatsekehal vdetaksem66dudtiipsu
V.Jaaniso Pinnasemehaanika 1. SISSEJUHATUS Kõik ehitised on ühel või teisel viisil seotud pinnasega. Need kas toetuvad pinnasele vundamendi kaudu, toetavad pinnast (tugiseinad), on rajatud pinnasesse (süvendid, tunnelid) või ehitatud pinnasest (tammid, paisud) (joonis 1.1). a) b) c) d) J o o n is 1 .1 P in n a s e g a s e o tu d e h i tis e d v õ i n e n d e o s a d .a ) p i n n a s e le t o e t u v a d ( m a d a l - j a v a iv u n d a m e n t) b ) p i n n a s t t o e t a v a d ( t u g is e in a d ) c ) p in n a s e s s e r a j a tu d ( tu n n e li d , s ü v e n d i d d ) p in n a s e s t r a j a tu d ( ta m m i d , p a is u d ) Ehitiste koormuste ja muude mõjurite tõttu pinnase pingeseisund muutub, pinnas deformeerub ja võib puruneda nagu kõik teisedki materjalid. See põhjustab
EESTI MEREAKADEEMIA RAKENDUSMEHAANIKA ÕPPETOOL MTA 5298 RAKENDUSMEHAANIKA LOENGUMATERJAL Koostanud: dotsent I. Penkov TALLINN 2010 EESSÕNA Selleks, et aru saada kuidas see või teine masin töötab, peab teadma millistest osadest see koosneb ning kuidas need osad mõjutavad teineteist. Selleks aga, et taolist masinat konstrueerida tuleb arvutada ka iga seesolevat detaili. Masinaelementide arvutusmeetodid põhinevad tugevusõpetuse printsiipides, kus vaadeldakse konstruktsioonide jäikust, tugevust ja stabiilsust. Tuuakse esile arvutamise põhihüpoteesid ning detailide deformatsioonide sõltuvuse väliskoormustest ja elastsusparameetritest. Detailide pinguse analüüs lubab optimeerida konstruktsiooni massi, mõõdu ja ökonoomsuse parameetrite kaudu. Masinate projekteerimisel omab suurt tähtsust detailide materjali õige valik. Masinaehitusel kasutatavate materjalide nomenklatuur täieneb pidevalt, rakendatakse efekti
TALLINNA TEHNIKAKÕRGKOOL Arhitektuuri ja keskkonnatehnika teaduskond Tehnoökoloogia õppetool Villu Vares ENERGIA ja KESKKOND Konspekt 1 Villu Vares Energia ja keskkond Tallinn 2012 2(113) Villu Vares Energia ja keskkond SISUKORD SISUKORD.............................................................................................................................................................3 SISSEJUHATUS....................................................................................................................................................5 1 ENERGIAKASUTUS JA MAAILMAS JA EESTIS........................................................................................6 1.1 ENERGIAKASUTUS MAAILMAS JA EESTIS.
Füüsikaline maailmapilt (II osa) Sissejuhatus......................................................................................................................2 3. Vastastikmõjud............................................................................................................ 2 3.1.Gravitatsiooniline vastastikmõju........................................................................... 3 3.2.Elektromagnetiline vastastikmõju..........................................................................4 3.3.Tugev ja nõrk vastastikmõju..................................................................................7 4. Jäävusseadused ja printsiibid....................................................................................... 8 4.1. Energia jäävus.......................................................................................................8 4.2. Impulsi jäävus ...............................................................
































Kõik kommentaarid