....“ ..................... 2014.a ....................................... Lemmik Käis Tartu 2014 1. Ülesanne - siledate silindriliste detailide istud Ülesande tingimuste kohaselt on teada standardsed istud: Põhiava JS6, mille läbimõõt on 122,62mm. Liite moodustunud istus on lõtku T 65m Fc.max==14,6% ja HS 100% 65m 14.6% x x 9.49m 0.00949mm 1) Istu täielik arvutus Ava JS6 Võll h7 Nimimõõde N 122.62mm Suurim võll GuS 122.62mm Suurim ava GuH 122.6325mm Väikseim ava GlH 122.6075mm Väikseim võll GlS 122.58mm Ava ülemine piirhälve ES 0
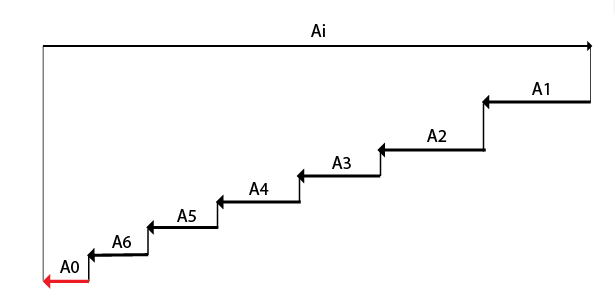
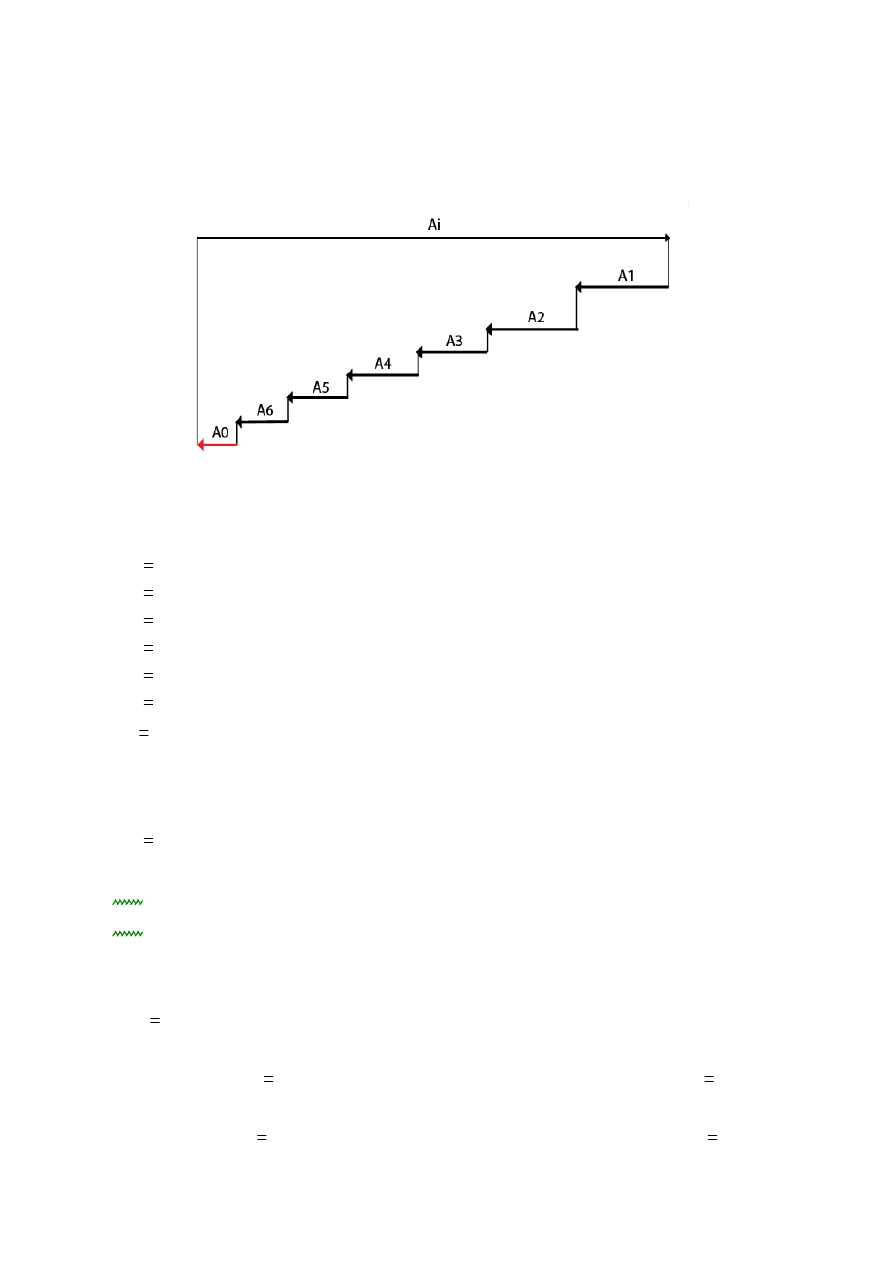
T H , S=F cmax -Fcmin =0,07-0=0.07 mm T H +T S=0,07 mm Istu tolerants 2) Prismaatiline liistliide ots- ja külgvaates. H 8 js 7 14 × × ×9 × 90 3) h9 h9 Ülesanne 4. A1 = 100 ± 0.00014 mm A2 = 100 ± 0.00014 mm A3 = 50 ± 0.00010 mm A4 = 6 ± 0.00006 mm A5 = 2.0 ± 0.00006 mm A6 = 1.02 ± 0.00006 mm A0 = 2 ± 0.00006 mm Ai = 261.02 ± 0.0006 mm Joonis 4. Joonisel on näidatud mõõteahel 2) Sulgeva lüli nimimõõde: A0 = A0 - Ai = Ai - (A1+A2+A3+A4+A5+A6) = 261.02 (100+100+50+6+2+1.02) = = 2.00 mm Lõpplüli ülemine hälve: ES = ES - EI ES = 0.0006-(-0.00014-0.00014-0.00010-0.00006-0.00006-0.00006)=0.00114 mm Lõpplüli alumine hälve: EI = EI - ES EI =-0.0006-(+0.00014+0.00012+0.00010+0.00006+0.00006+0.00006)=-0.00114 mm Lõpplüli tolerants: TA = TA = 0.00114 + 0.00114 = 0.00228 mm 0.00114 A0= 2 -0.00114
Product Specifications and Verifications. Vajalik insenerile, et luua uut. Põhimõisted: Mõõtmestamine: toote ja selle osade suuruse ja kuju määramine. Objekt esitatakse tehnilisel joonisel koos mõõtmete, asendi ja kuju nõuetega. Tolerants (tolerance) on võtmeküsimuseks projekteerimisel, tootmisel ja kasutamisel. Ist (fit). ISO süsteem istudele. Geomeetriline hälve. Pinnakaredus. Vahetatavus. Mõõteahel. Lähted, baaspinnad. Seosed teiste aladega - metroloogia; - standardimine; - kvaliteedi juhtimine; - tootmistehnoloogiad; - tehniline joonestamine; - tõenäosusteooria. 2 2. GPS STANDARDITE MAATRIKS MUDEL GPS standardid on jagatud 4 gruppi: - alus (põhi) GPS standardid; - globaalsed GPS standardid;
TALLINNA POLÜTEHNIKUM Päevane osakond ELEKTRIMOOTORI KIIRUSE AUTOMAATREGULEERIMISE SÜSTEEM Kursusetöö Õppeaine automaatreguleerimine Juhendaja: V. Purro Konsultant: V. Purro Tallinn 2010 2 Sisukord KURSUSETÖÖ ÜLESANNE..............................................................................................3 KURSUSETÖÖ ANDMED................................................................................................. 4 Sissejuhatus.......................................................................................................................... 6 2. SÜSTEEMI FUNKTSIONAALSKEEMI JA STRUKTUURSKEEMI KOO
KVALITEEDITEHNIKA JA METROLOOGIA ÕPPETOOL METROLOOGIA & MÕÕTETEHNIKA MHT0010/MHT0013 ARVUTUSTÖÖ ALGANDMED Esitamise kuupäev: 23.05.12 Arvestatud: Üliõpilane: Matrikli number: Õpperühm: MAHB41 Variandi number: A12 Mõõteskeem: OSA A. 1. Mõõtemudel mõõtme B ja hälvete mõõtmisel Sirgjoonelisuse hälve STR on mõõtevahendi näitude maksimaalne erinevus mõõteulatuses: Paralleelsuse hälve PAR on mõõtevahendi näitude maksimaalne erinevus mõõteulatuses: Sümmeetrilisuse hälve SYM on leitav valemiga: Laius: 2. Mõõteriista valik Kuna vajatav täpsustase on 5 m, siis valin mõõteriistaks digitaalse indikaatorkella, mille mõõtetäpsuseks on 1 m ning millel on olemas ka rakis. Lisaks veel pikkusplaat. OSA B. Tabel 1. Algandmed A1 42 74 20 15
OSA A 1. Mõõtemudel mõõtme B ja hälvete mõõtmiseks 2. Mõõteriista valik. Vajatav täpsustase 5 m Valin: Digitaalne indikaatorkell (täpsus 1m) rakisega + pikkusplaat OSA B Tabel 1. Algandmed A1 42 74 20 15 52 87 25 1 A2 32 93 33 55 50 24 3 56 A3 47 54 62 46 41 71 79 55 A4 51 40 71 66 32 82 96 49 A5 60 80 25 41 74 85 22 55 C6 50 28 75 65 59 46 51 44 C7 45 61 65 71 27 53 41 64 C8 71 76 46 48 44 57 23 6 C9 82 96 69 56
Järsult mittelineaarne Kui elemendil on lineaarne karakteristik siis nimetatakse seda lineaarseks elemendiks. Kui automaatika süsteem koosneb ainult lineaarsetest elementidest, siis on see süsteem lineaarne süsteem. Lineaarse süsteemi jaoks on välja töötatud arvutusmeetodid ja neid on küllaltki lihtne arvutada. Kui süsteemis on kasvõi üks mittelineaarne element, siis sellist süsteemi nimetatakse mittelineaarseks süsteemiks. Nende arvutus on raskendatud, selleks kasutatakse graafilisi meetodeid ja teisi keerulisi matemaatilisi meetodeid. Kui mittelineaarseid elementidel kasutada tema karakteristikust väikest osa, siis võib oletada, et selle osa piirides tema karakteristik on lineaarne. Arvutusi võib teha kasutades lineaarsete elementide jaoks välja töötatud meetodeid. Staatilisi omadusi iseloomustatakse staatilise ülekande teguriga. K= Xv / Xs
Järsult mittelineaarne Kui elemendil on lineaarne karakteristik siis nimetatakse seda lineaarseks elemendiks. Kui automaatika süsteem koosneb ainult lineaarsetest elementidest, siis on see süsteem lineaarne süsteem. Lineaarse süsteemi jaoks on välja töötatud arvutusmeetodid ja neid on küllaltki lihtne arvutada. Kui süsteemis on kasvõi üks mittelineaarne element, siis sellist süsteemi nimetatakse mittelineaarseks süsteemiks. Nende arvutus on raskendatud, selleks kasutatakse graafilisi meetodeid ja teisi keerulisi matemaatilisi meetodeid. Kui mittelineaarseid elementidel kasutada tema karakteristikust väikest osa, siis võib oletada, et selle osa piirides tema karakteristik on lineaarne. Arvutusi võib teha kasutades lineaarsete elementide jaoks välja töötatud meetodeid. Staatilisi omadusi iseloomustatakse staatilise ülekande teguriga. K= Xv / Xs


















Kõik kommentaarid