Tallinna Tehnikaülikool Mehhatroonikainstituut Kodutöö S2 Variant 1 Õppejõud: Leo Teder Üliõpilane: Matrikli number: Rühm: MAHB52 Kuupäev: 18.11.2012 Tallinn 2012 Lahendus Jõudude skeem: Q = q lq = 2kN Tasakaaluvõrrandid: 1) kõikide jõudude projektsioonide summa x-teljele on võrdne nulliga n Fix = 0 i =1 , 2) kõikide jõudude projektsioonide summa y-teljele on võrdne nulliga n Fiy = 0 i =1 , 3) kõikide jõudude momentide summa suvalise punkti suhtes on võrdne nulliga. ( ) n M A Fi = 0 i =1 MA 2 X A + T cos = 0 Y A - G AB - Q + T sin = 0 Seega: X A = -4,33 kN Y A = 9,5 k
J. Kirs Loenguid ja harjutusi dünaamikast 19 4. Näiteülesanded. Näide 4.1 Masspunkt massiga 2 kg liigub sirgjooneliselt jõu F mõjul, mille algväärtus on 8 N ja mis kasvab igas sekundis 2 N võrra. Leida punkti liikumise seadus kui v0 = 0 . Lahendus Suuname x-telje piki punkti liikumissirget. Kuna siin on tegemist ühedimen- N sionaalse juhtumiga, siis kasutame diferentsiaalvõrrandi üldkuju (4.7), kus Fkx k =1 on kõigi mõjuvate jõudude projektsioonide summa x-teljele, s.t N m x = Fkx (4.15) k =1 Millised jõ
1. Algandmed Joonis 1. Rihmülekande võll Joonisel nr.1 on välja toodud rihmülekande ühtlase võlli skeem, millele kogu ülesanne on püstitatud. Võlli materjal: teras E335 Voolepiir tõmbel: σy=325 Mpa Varuteguri väärtus: [S]=5 Võlliga ülekantav võimsus: P=5,5kW Iga rihma vedava ja veetava haru tõmbejõudude F ja f seos on F ≈ 2,5*f Väiksema rihmaratta efektiivläbimõõt: D1=140 mm Suurema rihmaratta efektiivläbimõõt: D2=2*D1=280 mm Võlli pöörlemissagedus: n=2400 p/min F1 ja f1 on väikse rihmaratta rihmade tõmbejõud ning F2 ja f2 on suure rihmaratta rihmade tõmbejõud, kusjuures F1≠f1 ja F2≠f2. Iga rihmaratta rihmade harud on paralleelsed. 2. Võlli aktiivsed koormused 2.1 Väänav koormus Väänav koormus = ülekantav (kasulik) pöördemoment. P Võlliga ülekantav pöördemoment: M= ω , kus P – v
TALLINNA TEHNIKAÜLIKOOL Mehhatroonikainstituut JÜRI KIRS INSENERIMEHAANIKA III Loenguid ja harjutusi dünaamikast Tallinn 2004 J. Kirs Loenguid ja harjutusi dünaamikast 2 III osa. DÜNAAMIKA §1. Sissejuhatus 1. Dünaamika aine ja põhikategooriad Dünaamikaks nimetatakse mehaanika osa, milles uuritakse materiaalsete kehade liikumist neile rakendatud jõudude mõjul. Staatikas uuritakse ainult jõudusid ja jõusüsteeme ning seal ei uurita seda, kuidas liiguks materiaalne osake või jäik keha kui sellele need jõud rakendada. Kinemaatikas uuritakse ainult liikumist, kuid seda puht geomeetrilisest aspektist, jättes täielikult välja jõud, mis selle liikumise põhjustavad. Dünaamikas uuritakse materiaalsete osakeste ja jäikade kehade liikumist neile rakendatud jõudude toimel ning ka seda, kuidas muutub see
TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut Kodutöö aines Sissejuhatus Robotitehnikasse Tööstusroboti Mitsubishi RV-3SQ kinemaatika ja juhtimine Õpilane: Strippar Marko 999999 Juhendaja: Tõnu Lehtla Tallinn 2011 Sisukord 1.Roboti valik ..........................................................................................................................................3 2.Roboti kirjeldus ...................................................................................................................................3 2.1Manipulaatori ehitus ..........................................................................................
TTÜ MEHHATROONIKAINSTITUUT MHE0041 - MASINAELEMENDID I MASINAELEMENTIDE JA PEENMEHAANIKA ÕPPETOOL MHE0042 MASINAELEMENDID I Kodutöö nr. 3 Variant nr. Töö nimetus: A-0 Keerukama Keevisliite Arvutus B-5 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: - MAHB32 .......A.Sivitski.............. - ..................................... Töö esitatud: Töö parandada: Arvestatud: 2011 dets TTÜ MEHHATROONIKAINSTITUUT MHE0041 - MASINAELEMENDID I MASINAELEMENTIDE JA PEENMEHAANIKA ÕPPETOOL KODUTÖÖ NR. 3 KEERUKAMA KEEVISLIITE ARVUTUS Keevisliide Jõuga F koormatud ko
Tallinna Tehnikaülikool Mehaanika teaduskond Masinaõpetuse Instituut Masinaelementide õppetool Tugevusõpetus 2 Üliõpilane: Töö Number: Matrikli nr.: Ülesannete nr.: 82 Õpperühm: Esitamise kuupäev Andmed l=6m k = 0,6 F = 60 kN p = 40 kN*m Staatika võrrandid F x = 0 R Bx = 0 F y = 0 R A - p * k * l + RB = 0 k *l M B = 0 - RA *l + p * k *l * 2 +MB =0 3 tundmatut ja kaks võrrandit annavad staatikaga määramatu süsteemi, tuleb kasutada deformatsioonide sobivusvõrrandit. Deformatsioonide sobivusvõrrand l A = l B = 0 Võtan lahendamiseks võrrandi l A = 0 . Eemaldan mõtteliselt liigendi A ja lahendan Moore'i meetodiga. 11 * x1 + 1 p = 0, kus x1 = R A 11 leidm
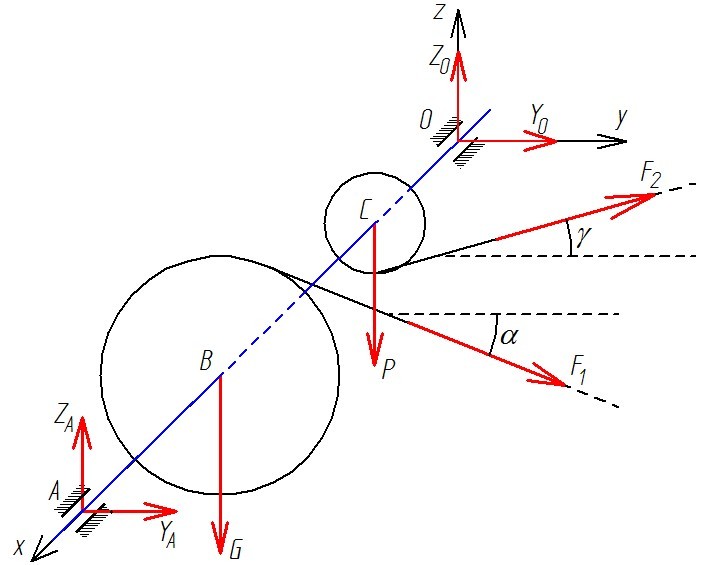
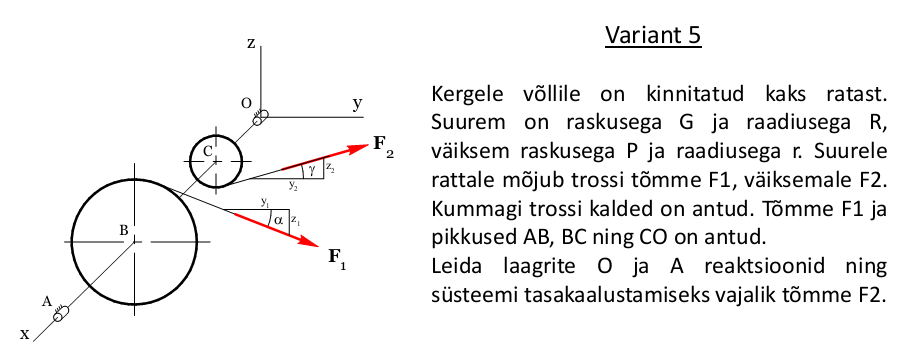
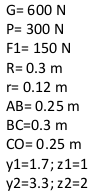
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega. Näiteülesandeid d'Alembert'i printsiibi kohta võib lugeda ka E. Topnik' u õpikus ,,Insenerimehaanika ülesannetest IV. Analüütiline mehaanika", Tallinn 1999, näited 14-17, leheküljed 39-49. Kõikides variantides xy-tasapind on horisontaalne, xz- ja yz-tasapinnad aga on vertikaalsed. Andmetes toodud suurused 0 ja 0 on vastavalt pöördenurga ja



















Kõik kommentaarid