TALLINNA POLÜTEHNIKUM
TSÜKLIÕPE
KEE-07
Kodune kontrolltöö Variant 7
Elektriajamite juhtimine Kodutöö nr. 1
Juhendaja : R.
KaskTöö laekumine TPT-sse ....................... 2009
Hinne .......................
Kuupäev ...................
Õpetaja
allkiri ...................................
Tallinn 2009 Sisukord Kodune kontrolltöö .......................................................................................................................................... 1 Sisukord.............................................................................................................................................................. 2 Ülesanne nr. 1 ..................................................................................................................................................... 3 Ülesanne nr. 2 ..................................................................................................................................................... 4 Ülesanne nr. 3 ..................................................................................................................................................... 5 Ülesanne nr. 1
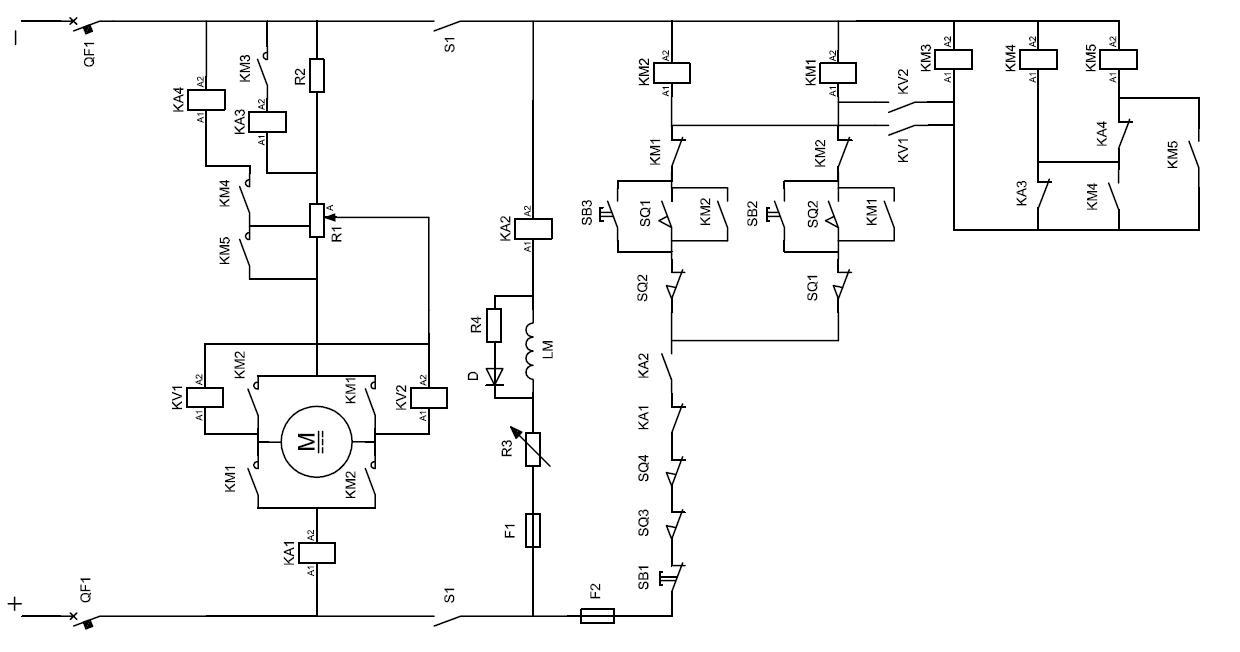
Juhtimisskeemi
pingestamine ja mootori jõuahelate kaitsmine lühise eest toimub
liinikaitselüliti
QF abil. Mootori ülekoormuskaitse toimub maksimaalvoolurelee KA1 abil,
mille mähis on lülitatud jadamisi mootori ankruahelasse,
avanev kontakt aga nullpingerelee
KA6 mähise ahelasse.
Skeemis on ette nähtud ka kaitse magnetvälja
kadumise eest, milleks on skeemi lülitatud ergutusvoolu kontrolli relee KA5, mille
mähis on lülitatud jadamisi mootori ergutusmähisega LM, sulguv kontakt aga
jadamisi nullpingerelee KA2 mähisega. Kaitse iseenesliku käivitumise eest on
teostatud nullpingereleega KA2. Mootori ergutusmähise kaitsmiseks ülepinge eest on
skeemi lülitatud lahendustakisti R4.
Juhtimisahelad on kaitstud lühise eest sulavkaitsmetega F1 ja F2.
Lõpulütitite mitterakendumisel on avarii lõpulülitit, mis katkestavad toite.
Mootori käivitamiseks lülitatakse sisse
nupp SB3 või
teistpidi liikumiseks SB2.
Mootori seiskamiseks tuleb vajutada STOP nuppu SB1.
Peale nupu SB3 vajutmist sulgub kontatkt KA2 ja pingestab mootori
ankruahela .
Kiirenduskontaktorite KM4 ja KM5
peakontaktid on avatud ja seega on ankruahelasse
lülitatud jadamisi käivitusreostaadi sektsioonid R1-1 ja R1-2.
Käivitusvoolu vähenemisel rakendub kiirendus-
kontaktor KM4, shunteerides
käivitusreostaadi
sektsiooni R1-1. Esimene käivitusaste on lõppenud, mootori ankruahela
takistus on hüppeliselt vähenenud. Selle tulemusena
toimub käivitusvoolu hüppeline suurenemine. Mootori kiiruse edasisel kasvamisel
hakkab käivitusvool uuesti vähenema, kuni rakendub kiirenduskontaktor KM5,
shunteerides käivitusreostaadi sektsiooni R1-2.
Mootori reversseerimiseks tuleb sisse lülitada lüliti SB2 või peab laud jõudma lõpulülitini
SQ2.Selle tulemusena kaotab toite seni rakendunud suunakontaktori mähis, toite saab aga
vastassuuna suunakontaktori mähis.
Suunakontaktorite peakontaktid mootori jõuahelas lülituvad ümber ja selle
tulemusena muutub ankruvoolu suund. Kuna pinge polaarsus ankrumähise
klemmidel on muutunud, ankrumähises indutseeritud emj suund aga ei muutu, sest
ankur jätkab
salvestunud kineetilise energia tõttu pöörlemist endises suunas, tagastub üks
ja seega tagastuvad nii pidurduskontaktor 5 kuikiirenduskontaktorid KM4 ja KM5. Nende
peakontaktid mootori jõuahelas avanevadja seega osutuvad nii pidurdustakisti R2 ja
käivitusreostaat R1 lülitatuks ankruahelasse piiramaks alanud vastulülituspidurduse voolu.
Rakenduvad kiirendusreleed KA3 ja KA4, avades oma kontaktid kiirenduskontaktorite KM4
ja KM5 mähiste ahelas.
Kui ankru pöörlemiskiirus on vähenenud nullilähedaseks, rakendub üks pidurdusreleedest
ja suleb oma kontakti, mille kaudu saab toite pidurduskontaktor KM3 ja
tema sulguv jõukontakt shunteerib pidurdustakisti R2. Toite kaotab kiirendusrelee
K3 ja algab ülalkirjeldatud mootori käivitusprotsess
eelnevaga võrreldes
vastassuunas .
peatub mootor loomulikult oluliselt kiiremini. Ülesanne nr. 2
Lihtsustada alljärgnevas tabelis esitatud
loogikafunktsioon nii
Boole 'I
algebra postulaate ja
teoreeme kasutades.
Koostada minimeeritud loogikafunktsiooni realiseeriv skeem, kasutades selleks tabelis nõutud
kontaktivabasid loogikaelemente.(VÕI-EI)
Minimeerin Boole'I algebra abil.
Z =a b + c +( a + b )c = a b + c + a c + bc = a b + c ( 1 + a ) +bc = a b + bc + c =
a b + c ( 1 + b )= a b + c Ülesanne nr. 3
Kasutatavad tagasisidede liigid jaotatakse positiivseteks ja negatiivseteks,
lineaarseteks ja mittelineaarseteks, jäikadeks ja paindlikeks (elastseteks).
Positiivne tagasiside on selline tagasiside, mille
signaal on etteandesignaaliga samasuunaline,
st etteandesignaal ja tagasisidesignaal liituvad.
Negatiivne tagasiside on selline tagasiside, mille signaal on etteandesignaaliga
vastassuunaline,
st tagasisidesignaal lahutub etteandesignaalist.
Lineaarset tagasisidet iseloomustab reguleeritava koordinaadi ja tagasisidesignaali
vaheline võrdelisus.
Mittelineaarse tagasiside korral võrdeline seos reguleeritava koordinaadi ja
tagasisidesignaali vahel puudub.
Jäik tagasiside toimib nii elektriajami väljakujunenud talitluses kui siirdetalitlustes.
Paindlik tagasiside toimib ainult elektriajami siirdetalitlustes ning kindlustab
siirdetalitluste etteantud kvaliteedi, näiteks liikumise stabiilsuse, lubatava ülereguleerimise
jne.
Sõltuvalt reguleeritavast koordinaadist kasutatakse elektriajamite suletud juhtimissüsteemides
kõiki ülaliseloomustatud tagasisidesid kiiruse, asendi, voolu, pinge, emj
ja magnetvoo järgi.















Kõik kommentaarid