L
N
PE
10A
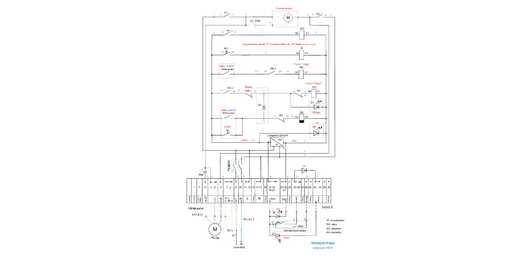
AC/DC 220/24V
+24V
-24V
Toide
D1
Rõhuandur
Pumba mootor KO 1 2 1 2 4 5 KO 6 5 M C3 30F
Pumba mootor KO 1 2 1 2 4 5 KO 6 5 M C3 30F 3
LELOL iseseisev töö Nr. 3 iseseisev töö Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 ÜLESANNE 1. Antud: A=25 m – vedeliku samba kõrgus P1=4 bar = 4*105 Pa – välisrõhk ρ=950 kg/m3 - tihedus g=9.81 m/s2 – gravitatsioon Leida: P2 - anuma põhjas olev rõhk F - jõud kui anuma põhjapindala on S=2 m2 Lahenduskäik: 1. Arvutan anuma põhjas oleva rõhu P2. P=P1+A*g* ρ P2=4*105 + 25*9.81 *950=632987.5 Pa=6.329875 bar 2. Arvutan jõu F. Pa=N/m2 632987.5 N/m2 / 2 m2=316493.75 N Vastus: P2=6.329875 bar F=316493.75 N ÜLESANNE 2. Antud: d=18 mm=0.018m – toru sisediameeter v=3.5 m/s – vedeliku kiirus l=130 m – toru pikkus υ=35 mm2/s=35*10-6 m2/s – kinemaatiline viskoossus tegur ρ=900 kg/m3 - tihedus Σξ=30 - kohalike takistuste summa Leida: p1 2 - Rõhukadu barides Lahend
SISUKORD 1. Laboritööde tegemise kord ja ohutustehnika................................................5 2. Laboritöö nr. 1...................................................................................6 Elektritakistuse mõõtmine............................................................................................6 3. Laboritöö nr. 2................................................................................. 7 Ohmi seaduse katseline kontrollimine (ahela osa kohta...............................................7 3. Laboritöö nr. 3...................................................................................8 Vooluallika emj. (allikapinge) ja sisetakistuse määramine..........................................8 5. Laboritöö nr. 4...................................................................................9 Kirchoffi II seaduse katseline kontrollimine.....................................
Analüütiline pindala määramine punkti nr. Xi Yi Yi+1-Yi-1 Xi-1-Xi+1 Xi(Yi+1-Yi-1) Yi(Xi-1-Xi+1) 1 6399587,577 653459,044 561,49 -592,02 3593298029,02 -386862130,15 2 6399624,480 653935,599 396,85 320,35 2539671776,01 209488923,08 3 6399267,226 653855,891 -85,60 744,48 -547770875,28 486782633,73 4 6398880,000 653850,000 -481,78 234,77 -3082858805,28 153503056,80 5 6399032,458 653374,110 -390,96 -707,58 -2501740133,65 -462312492,63 SUMMA 0,00 0,00 599990,83 599990,83 Pkoord=2P1/2*10000=599990,83/2*10000=30,00ha Magistraaljoone tagune pindala kujundi nr. Ja pindala arvutamise ai
Cat. No. W317-E1-11 SYSMAC CPM1A Programmable Controllers OPERATION MANUAL CPM1A Programmable Controllers Operation Manual Revised October 2007 iv Notice: OMRON products are manufactured for use according to proper procedures by a qualified operator and only for the purposes described in this manual. The following conventions are used to indicate and classify precautions in this manual. Always heed the information provided with them. Failure to heed precautions can result in injury to people or dam- age to property. ! DANGER Indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury. Additionally, there may be severe property damage. ! WARNING Indicates a potentially hazardous situation which, if not avoided, could result in death or serious inju
Autole paigaldatud rooli pöördenurga ja külgkiirenduse andurite andmeil määratakse stabiilsuse kadumise oht, olukorra päästmiseks aktiveeritakse mõni rattapiduriest ja vähendatakse mootori momenti. Väheneb kaadumise(ümbermineku) oht järskudes kurvides, hoitakse ära külglibisemine libedal teel või auto ja haagise nihverdumine (kokkukäändumine). ESP sai võimalikuks tänu elektroonilisele pidurisüsteemile EBS. ELC elektrooniline vedrustuse juhtimine ACC automaane pikivahe hoidmise süsteem(juht saab armatuurlaual asuva lülitiga valida eessõitjaga vajaliku pikivahe piirides 50...150m). Pidurina rakendatakse, vastavalt olukorrale, gaasi mahavõtmist, kestvuspidureid(mootorpidurit ja aeglustit) või sõidupidurit. Kui ACC-ga veoki ja eessõitja vahele kiilub end kolmas sõiduk, rakenduvad pidurid piisava tõhususega, et taastada endine vahemaa. Gaasipedaalile vajutades või pidurdades lülitub süsteem loomulikult välja.
SS.r-i jl i i I i I o ?We0;/^, a-- c-!--*Lo- clon'u!.*0A*n w+*n,*.*.-- " 0 o U0.+U^^- *f^r** /Lp^-,^-;* ^rE^J" U"^!rc-A^/-o- tpt^^,t t- kZzy"a- t^"M^h-r"^' G,tt- y,n**t-aoJ*t bqt'^'&o^---"^t 9 Nt"-"&a^- ".-&J t/^o'14^-^4^4y" Irrnqrlrr'ta!. 0"X^ !Ul^t- wta,Lt*ua*U,v(, g ^ ao -/" U i r/oh-{L la r#a^o!"nd;*. al--& Vou^e..^.!r}nr-),- *.b- N*tAtr"k ,/^o,fur.iaL fv[ nlto^ d, oc< cl'*r,Q'a* . -u H^r,vr;















Kõik kommentaarid