Loengukonspekt õppeaines MASINAMEHAANIKA Koostanud prof. T.Pappel Mehhatroonikainstituut Tallinn 2006 2 SISUKORD SISSEJUHATUS 1. ptk. MEHHANISMIDE STRUKTUURITEOORIA 1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid
Masinamehaanika kordamisküsimused 2010 1. Tuua näiteid kinemaatilistest paaridest ja nende sidemetest. Mehhanismi lülid seotakse omavahel nii, et neil säilub võimalus teineteise suhtes liikuda. Lülide suhtelist liikumist võimaldavaid ühendeid nim kinemaatilisteks paarideks. 1) Kerapaar on kolm sõltumatut rotatsioni ümber kolme telje. Vabadusastmeid on 3, sidemeid 3. 2) Silinderpaar translatsioon piki ühte telge ja sellest sõltumatu rotatsioon ümber sama telje. Vabadusastmeid 2, sidemeid 4. 3) Sõrmega kerapaar kaks sõltumatut rotatsiooni ümber kahe ristuva telje. Vabadusastmeid 2, sidemeid 4. 4) Transaltsioonipaar Translatsioon piki telge. Vabadusasmeid 1, sidemeid 5. 5) Rotatsioonipaar rotatsioon ümber ühe telje. Vabadusastmeid 1, sidemeid 5. 6) Kruvipaar rotatsioon ümber
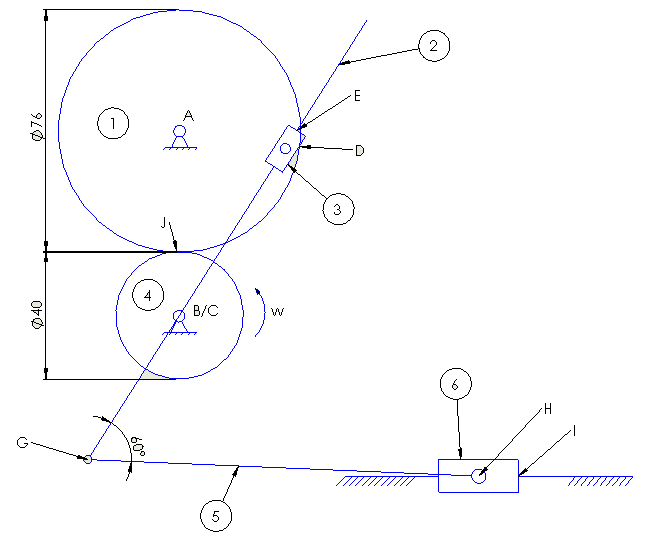
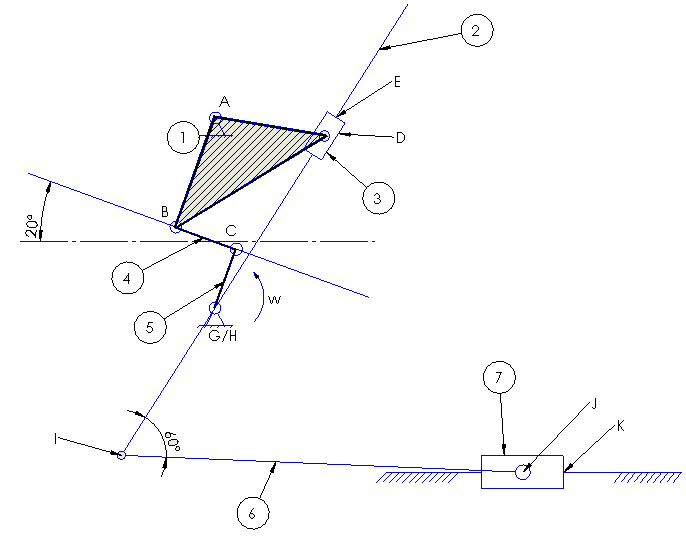
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Matriklinumber: Rühm: MAHB41 Kuupäev: 20.03.2012 Õppejõud: Merle Randrüüt Ülesande püstitus Risthöövelpink (ingl. k. shaping machine) on ehitatud nii, et liuguritera hoidikusse kinnitatud Hööveltera saab liikuda edasi-tagasi: lõikefaasis aeglaselt, tagasiliikumisfaasis kiiresti. Liugur pannakse liikuma kulissmehhanismi abil. Järgnevalt on esitatud risthöövelpingi kinemaatikaskeem:
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 26. märts 2012 Õppejõud: Merle Randrüüt Leo Teder Antud andmed: B r = 500 mm a = 700 mm h =1600 mm = 60 min-1 1) Määrata vedava lüli punkti A kordinaadid
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHD0030 MASINAMEHAANIKA KODUTÖÖ NR. 2 Väntmehhanismi kinemaatiline analüüs ÜLIÕPILANE: KOOD: Töö esitatud: 18.03.2014 Arvestatud: Parandada: TALLINN 2015 Lähteandmed Mehhanismi vänt OA pöörleb konstantse nurkkiirusega OA 2,4 rad/s. Pikkused: OA 40 cm, AB 110 cm, AC = 45 cm (punkt C – kepsu massikese). Leida:
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 15. mai 2012 Õppejõud: Merle Randrüüt Leo Teder Ülesanne 1 r = 250 mm l = 900 mm xB = 400 mm yB = 300 mm a) Määrata punkti A koordinaadid xA , yA funktsioonina pöördenurgast . xA = r * cos yA = r * sin
1) Impulss ehk liikumishulk on füüsikaline suurus, mis on võrdne keha massi ning kiiruse korrutisega. Kehtib ka liikumishulga jäävuse seadus, mis ütleb: suletud süsteemi kuuluvate kehade liikumishulkade geomeetriline summa on nende kehade igasuguse vastastikmõju korral jääv. Suletud süsteem on süsteem, mis ei ole vastastikkuses mõjus süsteemiväliste kehadega. 2) Staatiline hõõre - (keha seisab paigal) Dünaamiline hõõre - (keha liigub ühtlase kiirusega) 3) Kineetiline energia on liikuva keha energia, mis on võrdne poole ()antud keha massi ja tema kiiruse ruudu korrutisega. . Kineetilise energia tuletis aja järgi on keha võimsus 4) Konservatiivsed jõud on sellised, mille töö liikumisel 1 2 ei sõltu trajektoorist, vaid punktide 1 ja 2 asukohast ruumis. Konservatiivsete jõudude alla kuuluvad nt potentsiaalne energia (gravitatsiooni jõud ja vedru jõud ) 5) Energia jäävuse seadus on üks olulisimaid jäävusseaduseid füüsikas, mi
1. SISSEJUHATUS BIOMEHAANIKASSE Biomehaanika · Biomehaanika on teadusharu, mis uurib mehaanilise liikumise nähtusi bioloogilistes süsteemides (kudedes, organites ja organismis) · Biomehaanika on biofüüsika haru · Biomehaanika on bioloogia ja füüsika piiriteadus: -uurimisobjektilt (elusorganism ja selle struktuurid) kuulub ta bioloogia valdkonda -uurimismeetoditelt kuulub aga mehaanika valdkonda Biomehaanika jaotus · Inseneri biomehaanika- uurib bioloogiliste objektide ehitusprintsiipide kasutamise võimalusi inimesele vajalike tehniliste vahendite (robotid, manipulaatorid jt.) valmistamisel · Ergonoomiline biomehaanika- käsitleb tööprotsessi ratsionaliseerimise probleeme · Meditsiiniline biomehaanika- käsitleb proteesiehituse, traumatoloogia, ortopeedia, füsioteraapia jt. Probleem · Inimese liikumise biomehaanika- uurib inimese liikumisaparaadi ja liigutustegevuse biomehaanilis aspekte (tööprotsessis, s


















Kõik kommentaarid