Küsimused. 1)Mis on lineaarsuse tingimus lineaarsuse plokk koodidel+ 2)Misasi on koodivektor- 3)Mis on sõnumivektor 4)Mis on veaparandusvektor 5)Milleks arvutatakse moodustaja maatriksit 7)Milleks arvutatakse veakontrolli maatriksit 8)Mis asi on sündroom. 9)Mis asi on Hammingi kaal 10)Mis asi on Hammingi distants(vahemaa) 11)Kuidas on seotud Hammingi kaal ja Hammingi minimaalne distants 12)Kuidas on koodi minimaalne distants seotud veaparanuds võimega. (seletada tingimus kuidas vigu parandada saab) 13)Hammingi koodi iseloomustus. 14)Mis vigasid saab parandada Hammingi koodi järgi (valemid). 15)Hammingi koodi teisendamise ylesanne. Vastused 1)Koodide lineaarsuse tingimus-koode nim lineaarseks kui kahe koodisõna liitmisel mooduliga kaks saame tulemuseks kolmada,sama koodi koodisõna.
VASTUVÕTJA Kanali kodeerimise teoreem on üks informatsiooniteooria tähtsamaid tulemusi. Teoreem määrab ära kanali läbilaskevõime, kui põhimõttelise kiirse piiri, millega võimalik edastada sõnumeid läbi diskreetse mäluta kanali suhteliselt väikese vigade arvuga. Kanalikodeerimis teoreem ei osuta kuidas sellist head koodi moodustada, vaid näitab et sellise koodi moodustamine on võimalik teoreemis toodud tingumuste täitmise korral 2) Hammingi kood Hammingi kood on Telekommunikatsioonis kasutatav veaparanduskood, mis võimaldab avastada 2-bitiseid vigu või parandada 1-bitiseid vigu. 1940-ndatel töötas Richard Hamming firma Bell Laboratories mehaanilise arvuti juures, mis kasutas sisendseadmena perfokaardilugejat. Kuna viimasel tuli andmete perfokaartidelt arvutisse lugemisel sageli ette vigu ja kogu lugemisprotseduuri tuli iga kord korrata algusest peale, siis hakkas Hamming uurima, kuidas saaks andmete
Kui järgmine sümbol sõltuks eelmise vigasusest, peaks andma ülemineku tõenäosused. Lihtsam varjant: Täiesti juhuslik kanal, ilma mäluta -> Bernoulli katsete seeriale lähedane.Kombinatsioonide arv n-st q kaupa*müü astmes q* (1-müü)astmes n-q. N=k+r. 1+summa q=1st n-ni tõenosusus <= 2 astmes r. Kui kontrollarvu kõik komponendid tulead 0-d on kood õige. 26. Liiaste sümbolite arvu määramine süstemaatiliste ühekordseid vigu parandavate koodide jaoks(slaidid 11). Hammingi kood: U(k)=(r/n)*100%, kus n tähistab kõiki sümboleid ja r liiaseid. n+1=2^r; Näiteks kui koodis on 7 sümbloit, siis 7+1=2^3 ja liiaseid sümboleid on 3. 27. Keskmise ekvivalentse vigasuse tõenäosuse määramine sümmeetrilise kahese kanali korral.Konspekt 8. Vigasuse keskmine tõenöosus leitakse valemiga = P( 0) P0 (1 *) + P(1) P1 ( 0 *) , kus P(0),P(1) sõltumatud tõenäosused, P0 (1 *) , P1 ( 0 *) - tinglikud tõenäosused.
lisabitid. Bittidele lisatakse paarsusbitte. Igas õiges peab olema paarisarv ühtesid, kui on siis paarsusbitt = 0, kui ei siis 1. Võimalik avastada vaid 1 biti vigu. Arvutite veakindlus, veakindlad koodid Info edastamisel tekib vigu (0 1 või 1 - 0). Selle jaoks on olemas nii vigu avastavad koodid kui ka vigu parandavad koodid. Vigu avastav eelmine punkt. Vigu parandav kood avastab vigase koodi ja parandab selle. Kahe õige koodi vaheline Hammingi distants (erinevus kahendjärgus) peab olema vähemalt kolm. Konveier protsessoris & mälus Otstarbekas on koormata riistvara maksimaalselt. Ilma konveierita täidetakse käske jadamisi. Konveieri abil saab seda teha aga paralleelselt. Konveier ei suurenda üksiku käsu täitmise kiirust, aga ajaühikus täidetakse rohkem käske. Nt. kõigepealt saadab 1 käsu käsuloendur koodi teele, et saada mälukood, samal ajal laadib endasse järgmise käsu ja saadab ka selle teele
Töökindluse parandamiseks kasutatakse liiasust, mille korral on vea korral alati võimalik kas viga parandada või minna üle teise ketta kasutamisele. RAID kettaid realiseeritakse nii riistvaraliselt kui ka tarkvaraliselt. RAID-0 - Ühe ketta rike tähendab andmete kaotamist, kiirus on väga suur RAID-1 - dubleeritakse identne info mitmele kettale. väga kiire ketaste massiiv. RAID-2 - Jaotatakse ketaste vahel bittidena. Kasutatakse Hammingi veaparanduskoodi. RAID-3 - Jagatakse baitidena ja ühte ketast kasutatakse paarsuskontrolli info salvestamiseks RAID-4 - Info salvestatakse plokkidena eri ketastele. On sõltumatud ja saab pöörduda sõltumatult. Paarsusinfo on salvestatud eraldi. Peab pidevalt pöörduma paarsusketta poole. RAID-5 - Nagu tase-4 aga paarsus on hajutatud RAID-6 - jagatakse plokkidena, kontrollkood kirjutatakse mitmele kettale, kasutades
veasignaal. Liiasusinfo: paarsusbitid (Hammingi või Reed-Solomoni kood); paigutus .
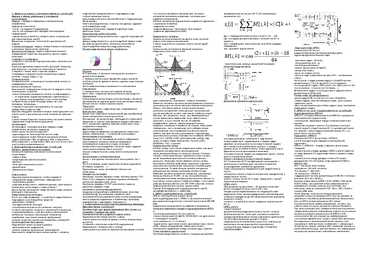
Need kaks sisendit on samaväärsed Minimaalse distantsi dekooder peab langetama otsuse, milline neist kahest sisendist alles jätta ilma toimimiskaota Selliste otsustuste jada on see, mida Viterbi algoritm teel mööda võre teeb Kevad 2009 Tallinna Polütehnikum 35 Viterbi algoritm Algoritm toimib arvutades erinevuste suuruse (kaalu) iga võimaliku tee kohta mööda võret Konkreetse tee kaal on sellele vastava kodeeritud järjestuse ja vastuvõetud järjestuse Hammingi vahemaa Iga võre sõlme (oleku) kohta algoritm võrdleb kahte sisenevat teed Kevad 2009 Tallinna Polütehnikum 36 Viterbi algoritm Alles jäetakse väiksema erinevusega (kaaluga) tee ja suurema erinevusega tee jäetakse kõrvale Seda arvutust tehakse võre iga taseme (ajahetke) j kohta vahemikus M j L, milles M on koodri mälu ja L on sõnumibittide arv Kevad 2009 Tallinna Polütehnikum 37 Viterbi algoritm. Näide 0 01 1 = 00 01
andmebitis olevate 1-de arvu. Kui mõni andmebitt muutub, tuvastatakse viga. Eeldatakse, et viga on ühes järgus. Paarsusbitiga pole võimalik avastada 2 või enam vigu. Samuti ei leita viga, kui kood muutub, kuid selles on ikka paaris/paaritu arv 1-sid. Ühebitist viga on võimalik tuvastada, kuid parandada mitte. Vigu parandavad koodid – võimaldavad ka vigu avastada. Kahe õige koodi erinevust kahendjärkudes nimetatakse Hammingi distantsiks. Näites on õiged koodid 000 ja 111, mille Hammingi vahe on 3. Kui salvestati kood 000 ja hiljem loeti 001, siis Hammingi distants 000-st on 1 ja 111-st on 2, seega valitakse väiksema distantsiga kood. Edastatud kood on 000 ja tehakse vastav parandus. Kahe õige koodi vahe peab olema vähemalt 3. XVII 1. Summaatorid: järjestik, paralleel ja kiire ülekanne. VT IV piletit 2. Juhtautomaat : osa käsu täitmisel ja realiseerimine.
meetodeid: 1) Vigu avastavad koodid – Edastatavatele andmebittidele lisatakse paarsusbitt (koodi pikkus n+1). Igas õiges koodisõnas peab olema paarisarv ühtesid. Vea olemasolu näitab see, kui edastamise käigus mõni andmebitt muutub ja koodis ei ole enam paarisarv ühtesid. Eeldatakse, et viga on ühes järgus, ei ole võimalik avastada kahe või enama biti vigu ning leitud vigu ei saa parandada. Kahe õige koodi erinevust kahendjärkudes nimetatakse Hammingi distantsiks. 2) Vigu parandavad koodid – Võimaldav avastada ja parandada. Kahe õige koodi vaheline Hammingi distants peab olema vähemalt kolm. Seega ühe järgu viga viib vale koodi õigest koodist ühe ühiku kaugusele, samas kui teise õige koodini on kaks ühikut. Valitakse väiksema distantsiga kood. 30 31 20. LCD, LED OLED ja plasma kuvarid (292-308) 20.1
Kasutatakse superarvutites kus oluline kiirus ja mälumaht. Tase 1. Liiasusega ketta puhul kasutatakse peegeldamist, mille korral dubleeritakse identne info mitmele kettale. Kogu infost on olemas koopia teisel kettal. Tegemist on väga kiire massiiviga kuna, kus lugemise kiirus on suurem kui ühe ketta puhul. Ühe ketta rikke korral saab tööd jätkata, sest infost on koopia. Kasutatakse tihti andmebaasides. Tase 2. Andmed jaotatakse ketaste vahel bittidena. Iga bitirea jaoks kasutatakse Hammingi veaparanduskoodi(ECC). Ühele või mitmele kettale salvestatakse veaparanduskoodi lisajärgud. Veaparanduskoodi kasutamisega püütakse vähendada ketaste massiivi hinda võrreldes taseme 1 info dubleerimisega. Kui tekib viga ühelt kettalt lugemisega siis saab seda parandada. Tase 3 Andmed jagatakse baitidena ketaste vahel ja ühte ketast kasutatakse paarsuskontrolli info salvestamiseks. Tase 4 Info salvestatakse plokkidena eri ketastele.Kõik kettad on sõltumatud ja
töökiirust, hind on madalam. RAID-i kettad jagatakse tasemeteks: Tase 0 – Tegemist on ilma liiasuseta ketaste massiiviga, mis on RAID-i tasemetest kõige odavam. Kasutatakse superarvutites. Tase 1 – Liiasusega ketta masiivi puhul kasutatakse peegeldamist, mille korral dubleeritakse identne info mitmele kettale. Kogu infost on alati olemas koopia teisel kettal. Kasutatakse andmebaasisüsteemides. Tase 2 – Andmed jaotatakse ketaste vahel bittidena. Iga bitirea jaoks kasutatakse Hammingi veaparanduskoodi. Tase 3 – Andmed jagatakse bittidena ketasete vahel ja ühte ketast kasutatakse paarsuskontrolli info salvestamiseks. Tase 4 – Info salvestatakse plokkidena eri ketastele. Kõik kettad on sõltumatud ja nende poole saab pöörduda samaaegselt, mis võimaldab tõsta pöörumise kiirust, kuid kõikide plokkide paarsusinfo on salvestatud eraldi ühele kettale. Kiirus väheneb.
aga vastavalt juhule kas ALUsse või mõnda andmeregistrisse. n) Pärast vajalike ALU tehete/operatsioonide tegemis läheb tulemus tagasi mõnda andmeregistrisse/suvapöördusmällu. 3. VEAKINDLAD KOODID Vigu avastavad koodid Vigu parandavad koodid Võimalik vähendada seadmete keerukust ning suurendada töökindlust. Nende koodide puhul õigete koodide arv märksa väiksem võimalike koodide arvust. Tuntumad veakindlad koodid on Hammingi ja Mulleri koodid.Hammingi kood võimaldab avastada 2-bitiseid vigu või parandada 1-bitiseid.
Kui eeldada, et korraga esineb vaid üks viga, siis saab niisuguse koodiga ka vigu korrigeerida, s. t keelatud koodid jagunevad omakorda rühmadesse, mille koode korrigeeritakse kas üheks või teiseks lubatud koodiks. Koodi sammu suurenemisel avarduvad ka vigade avastamise ning korrigeerimise võimalused. Kui koodis on informatsiooni rohkem kui tema eristamiseks minimaalselt vaja, on tegu liiaskoodiga. Seega sobivad liiaskoodid veatõrjekoodideks. Tuntumad veatõrjekoodid on Hammingi ja Reedi-Mulleri koodid. Tabel 1.1 Arvkoodid ja arvusüsteemid Nr Koodi nimi Sümbolid ai Koodi valem või näide 1 Kahendkood 0, 1 La3 ⋅ 23 + a2 ⋅ 2 2 + a1 ⋅ 21 + a0 ⋅ 2 0 12 2 Kaheksand- 0, 1, 2, 3, 4, 5, 6, 7 La3 ⋅ 83 + a2 ⋅ 82 + a1 ⋅ 81 + a0 ⋅ 80 kood