Metalli takistuse temperatuuritegur: R1 - R 2 = R 2 t1 - R 1t 2 Metalli takistus 0o C juures: R1 Ro = 1 + t1 Pooljuhi takistuse temperatuurisõltuvuse lähendussirge võrrandi kordaja: W ln R 1 - ln R 2 = 2k ln R 2 ln R 1 - T1 T2 Pooljuhi omajuhtivuse aktivatsioonienergia: 2 k T1 T2 R 1 W = ln T2 - T1 R2 Metalli takistuse temperatuuriteguri veahinnang: = 1 1 2 21 + 1 1 2 2 + ( ) 2 ( R ( t - t ) R R ( t - t ) R 2 R 22 - R 1 R 2 t 1 R 12 - R 1 R 2 t 2 2
l e 9. Arvutage valemist (1) elektroni erilaeng ja võrrelge tabeliandmetega. m Tabel. Mõõtmise Nr. 1 2 3 4 5 6 7 8 9 10 Is , A Ia , mA Ua= ............ V Arvutused. Kineetilise magneetilise induktsiooni veahinnang N B k = µo I sk l Elektroni erilaengu veahinnang 2 2 e R 2 -2 R 2 -2
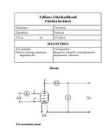
Colpittsi(a) ja Hartley (b) ostsillatorid 2.Ostsillatori väljundpinge amplituud Vaja on leida ostsillatori väljundpinge amplituud.Amplituudi mõõtmiseks kasutasime Other Meas menüüst valikut VOLT PEAKS, mis leidis signaali maksimaalse( Vmax ) ja minimaalse ( Vmin ) väärtuse. Amplituud on leitav järgmiselt: Vmax = 5,1 V Vmin = -5,1 V Vmax - Vmin 5,1 - ( -5,1) A= = = 5,1 (V) 2 2 3.Sageduse keskväärtus,veahinnang ja stabiilsus Kasutades reziimi Stop/Single mõõtsime väljundsignaali sagedust kümnel korral. Saime järgmised mõõtetulemused: f 1 = 1011,147 kHz f 2 = 1010,999 kHz f 3 = 1011,017 kHz f 4 = 1011,022 kHz f5 = 1011,018kHz f6 = 1011,012kHz f7 = 1011,008kHz f8 = 1011,003kHz f9 = 1010,998kHz f 10 = 1010,993 kHz 1)Sageduse keskväärtuse leiame järgmiselt: - 1 10 f = fi n i =1
Kuidas leida osatuletisi? 5. Ekstreemumid (lokaalse maksimumi ja miinimumi definitsioon). 6. Statsionaarne punkt (definitsioon). 7. Lokaalsete ekstreemumite leidmise algoritm. 8. Globaalsete ekstreemumite leidmise algoritm. Võrdlus lokaalsete ekstreemumite leidmisega. 9. Pinna puutujatasandi võrrand. Mis on lineariseerimine ja mis on selle idee? 10. Täisdiferentsiaali valem. Rakendusi (nt veahinnang). 11. Gradient (definitsioon, omadused ja tähistused). 12. Tuletis suvalise ühikvektori suunas (tähistus, leidmine). 13. Kahekordse integraali omadused. Kuidas arvutada kahekordset integraali? 14. Kahekordse integraali rakendusi. 15. Üleminek polaarkoordinaatidele (millal kasutada, valemid üleminekuks). 16. Kolmekordse integraali omadused. Kuidas arvutada kolmekordset integraali? 17
Siis koondub lähend xn täpseks lahendiks x*, st xn → x*. Oluline tingimus sellise koondumies jaoks on: |g’(x)| ≤ q ≤ 1. (3) Teoreem: Leidugu võrrandi (1) lahendit x* sisaldav vahemik (a, b), milles on täidetud võrratus (3). Olgu funktsioon g(x) selline, et ∀x ∈ (a, b) korral g(x) ∈ (a, b). Olgu x0 ∈ (a, b). Siis koondub hariliku iteratsioonimeetodiga arvutatud lähendite jada xn täpseks lahendiks x*. Lisaks kehtib veahinnang n q | xn – x*| ≤ 1−q | x1 − x0 |. (4) Tõestus: Et x0 ∈ (a, b) ja g(x) ei vii vahemikust (a, b) välja, siis x1 = g(x0) ∈ (a, b), x2 = g(x1) ∈ (a, b), ...., xn = g(xn-1) ∈ (a, b). Et x* on võrrandi (1) täpne lahend, siis x* = g(x*). Lahutame seosest (2) viimase võrduse, saame
24.7) järeldub, et Algoritmil (1.24.3) põhinevat võrrandi (1.24.2) lahendamise meetodit nimetatakse harilikuks iteratsioonimeetodiks. 6 Teoreem: Leidugu võrrandi (1) lahendit x* sisaldav vahemik (a, b), milles on täidetud võrratus (3). Olgu funktsioon g(x) selline, et x (a, b) korral g(x) (a, b). Olgu x0 (a, b). Siis koondub hariliku iteratsioonimeetodiga arvutatud lähendite jada xn täpseks lahendiks x*. Lisaks kehtib veahinnang n q | xn x*| 1-q | x1 - x0 |. (4) Tõestus: Et x0 (a, b) ja g(x) ei vii vahemikust (a, b) välja, siis x1 = g(x0) (a, b), x2 = g(x1) (a, b), ...., xn = g(xn-1) (a, b). Et x* on võrrandi (1) täpne lahend, siis x* = g(x*). Lahutame seosest (2) viimase võrduse, saame
n 4 2 Jaotades kõvertrapetsi 0.5 suurusteks intervallideks saame trapetsite piirkondadeks [ 1; 1.5 ] , [ 1.5 ; 2 ] , [ 2 ; 2.5 ] ,[2.5 ; 3] Asendades ∆ x ja piirkonnad valemisse saame 1 3 2 1 ∫ e x−2 dx ≈ 2 [ e1−2 +2∗e1.5−2 +2∗e2−2 +2∗e2.5 −2+ e3−2 ]=¿ 4 ( e−1 +2∗e−0.5 +2∗e 0+ 2∗e 0.5 +e 1 )=2.399166283 1 Siinseks veaks on 0.048763895. Veahinnang: (b−a)3 |R|≤ max |f ' ' (x)| 12 n2 x ∈[a ;b ] Veahinnangu jaoks arvutame: max |(e x−2 )' '|=max {|(e x−2 )' '|x=1 ,|(e x−2 )' '|x=3 }=max x ∈[1 ;3] {| | | |} 1 e , e =e ( 3−1 )3
3n 2 y 0 2( y1 y 3 ... y 2 n 1 ) ( y 2 y 4 .... y 2 n 2 ) y 2 n 2 . Saadud ligikaudset valemit nimetatakse Simpsoni valemiks. Veahinnang Simpsoni valemi jääkliige: b ba 1 1 Rn f ( x)dx y 0 2( y1 y 3 ... y 2 n 1 ) ( y 2 y 4 ... y 2 n 2 ) y 2 n a 3n 2 2
[ 1; 1 .5 ] , [ 1.5 ; 2 ] , [ 2; 2 .5 ] ,[2.5; 3 ] Asendades ∆x ja piirkonnad valemisse saame 18 1 3 2 1 ∫ e x−2 dx ≈ 2 [ e1−2 +2∗e1.5−2 +2∗e2−2 +2∗e2.5 −2+ e3−2 ]=¿ 4 ( e−1 +2∗e−0.5 +2∗e 0+ 2∗e 0.5 +e 1 )=2.399166283 1 Siinseks veaks on 0.048763895. Veahinnang: 3 (b−a) |R|≤ max |f ' ' (x)| 12 n2 x ∈[a ;b ] Veahinnangu jaoks arvutame: max |(e x−2 )''|=max {|(e x−2 )' '|x=1 ,|( e x−2 )''|x=3 }=max x ∈[1 ;3] {| | | |} 1 e
Vastavat lineaarset kahe muutuja funktsiooni L ( x , y )=f ( x 0 ; y 0 ) +f x ( x0 ; y 0 ) ( x−x 0 ) + f y (x 0 ; y 0 )( y− y 0 ) nimetatakse orginaalse funktsiooni f(x,y) lineariseerimiseks punktis ( x0 ; y0 ; z0 ) IDEE: 12.Täisdiferentsiaali valem. Rakendusi df =f x dx + f y dy+ f z dz Rakendusi: veahinnang, kujundi ruumala 13.Gradient(definitsioon, omadused ja tähistused) DEF: Diferentseeruva funktsiooni gradiendiks nimetatakse n- mõõtmelist vektorit, mille koordinaatideks on vaadeldava funktsiooni esimest järku osatuletised grad f =(f x , f y , f z) , ∇ f =grad f OMADUSED: Funktsiooni tuletis on maksimaalne gradiendi suunas ja võrdub gradiendi pikkusega ∥ grad f ∥=√ f 2x +f 2y + f 2z .