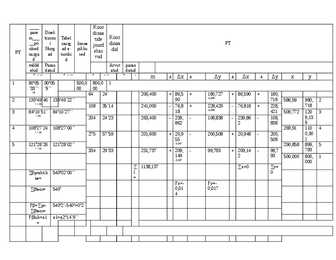
____ Koor pare Direk dinaa m___ tsioon Tabel tide Koor __po i inurg Joone juurd dinaa PT olsed Nurg ad e. pikku did PT ekas nurga ad rumbi sed vud d d mõõd Paran Arvut paran etud datud atud datud ° ' '' ° ' '' ° '" ° ' m ± x ± y ± x ± y x y 0 0 1 90 05 90 05 500,0 800,0 1 `33``- `9``
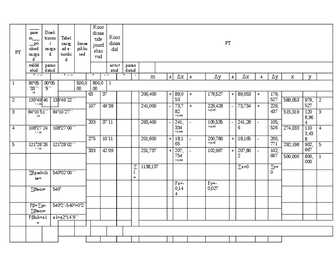
____ Koor pare Direk dinaa m___ tsioon Tabel tide Koor __po i inurg Joone juurd dinaa PT olsed nurga ad e. pikku did PT ekas nurga d rumbi sed vud d d mõõd paran arvut paran etud datud atud datud ° ' '' ° ' '' ° '" ° ' m ± x ± y ± x ± y x y 0 0 1 90 05 90 05 500,0 800,0
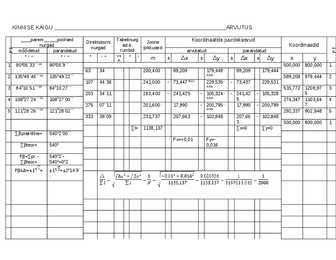
KINNISE KÄIGU ARVUTUS ____parem_____poolsed Tabelinurg Koordinaatide juurdekasvud Direktsiooni Joone nurgad nurgad ad e. pikkused Koordinaadid PT
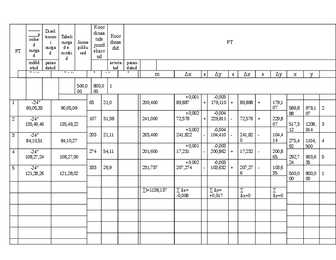
_____ Koor Direk dinaa ____p tsioon Tabeli Koor oolse tide i nurga Joone dinaa PT d juurd nurga d e. pikku did PT nurga ekasv d rumbi sed d ud d mõõd paran arvuta paran etud datud tud datud ° ' '' ° ' '' ° '" ° m x ± y ± x ± y x y 500,0 800,0 1
tulemusena saadakse tasandatud nurgad. Seejärel arvutatakse välja ülejäänud direktsiooninurgad, kasutades tasandatud nurkade väärtusi. Seejuures tuleb tähele panna, et direktsiooninurk ei tohi olla suurem kui 360kraadi (tehe ise on selline, et direktsiooninurgale tuleb liita tasandatud nurk ja siis liita või lahutada 180kraadi nii, et väärtus üle 360 kraadi ei tuleks). Seejärel arvutatakse koordinaatide juurdekasvud (valemid: x juurdekasv = s*cos alfa, y juurdekasv = s* sin alfa, kus alfa on suuna direktsiooninurk ja s mõõdetud horisontaalkaugus). Järgmisena tuleb arvutada juurdekasvude summad x ja y ning need peaksid võrduma teoreetiliste väärtustega x1-x2 ja y1-y2 (ehk baasjoonte otspunktide koordinaatide vahega). Seejärel tuleb leida koordinaatide juurdekasvude koguvead x ja y. Need saadakse siis, kui mõõdistatud väärtustest lahutatakse teoreetilised väärtused