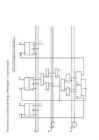
Reverssiivne paraleellaadimisega nihkeregister T trigerite baasil. Kui M=1, on nihe paremale, kui M=0, on nihe vasakule. Kui PL=1, toimub parallleellaadimine välisest sisendist (Di) qi+1 qi qi qi-1 qi+1 qi-1 TT TT TT R C T R C T R C T R C Ti+1 Ti T...
docstxt/1303826368135882.txt
Tallinna Tehnikaülikool INFOTEHNOLOOGIA TEADUSKOND Arvutitehnika instituut Kontrolltöö aines ,,Arvutid I" x Tallinn 2012 Ülesanne Koostage reverssiivse paralleel laadimisega vasakule nihutava nihkeregistri loogikaskeem T trigerite baasil. Lahendus Reversiivne vasakule nihutav kui M=1 nihutab vasakule. Paralleel laadimisega kui PL=1 siis Di=>qi, kus Di on algväärtus
Tallinna Tehnikaülikool INFOTEHNOLOOGIA TEADUSKOND Arvutitehnika instituut Kontrolltöö aines ,,Arvutid I" Tallinn 2012 Reverssiivse nihkeregistri loogikaskeem paralleellaadimisega nihkeregistri loogikaskeem JK trigerite baasil. Kui M=1, on nihe paremale, kui M=0, on nihe vasakule. Kui PL=1, toimub parallleellaadimine välisest sisendist (Di) qi+1 qi qi-1 TT TT TT R C JK R C JK R C JK R C
Arvutid I (IAF 0041) Reversiivne parallel ladimisega nihkeregister T triggerite baasil Kontroll töö nr.1 Juhendaja: dotsent Teet Evartson Tallinn 2014 · Ülesande püstitus · Elementide kirjeldus · Loogika skeem Ülesande püstitus Koostada reverssiivse paralleel ladimisega nihkeregistri loogikaskeem T trigerite baasil. Tallinna Tehnikaülikool Elementide kirjeldus Põhielement T trigger ja baas loogika elementid. Tõenäolustabel on sama nagu D trigeril, põhimõtteliselt see on D trigger T triggeri baasil. D C Q
joonisel 5.4. Koordinaatide alluvreguleerimise põhimõttel üles ehitatud ajami analoogosa koosneb kiiruseregulaatorist KR ja kiiruseandurist (tahhogeneraator B) koosnevast kiiruse reguleerimise kontuurist ja temale alluvast vooluregulaatorist VR ja vooluandurist VA koosnevast voolu reguleerimise kontuurist. Kiiruseregulaator saab etteandesignaali intensiivsuse etteandurilt IE ja tema väljundsignaal Ue,i on vooluregulaatori etteande- signaaliks. Vooluregulaatori väljundsignaal Uj on reverssiivse jõumuunduri JM juhtimissignaaliks. Need mõlemad kontuurid alluvad numbrilisele asendi reguleerimise kontuurile ajami analoogosasse kuuluva asendiregulaatoriga AR. Kõrvalekaldesignaali Uformeeriva numbrilise mõõteosa koosseisu kuuluvad elektri- mootori võlli asendit etteandev numbriline sisendkoordinaadi andur AEA ja elektri- mootori võlli tegelikku asendit kontrolliv väljundkoordinaadi andur AA, aritmeetiline summeerimisseade AS, numbrilist koodi analoogpingeks muundav koodanaloog-