käiguvahetuseks ja käigukasti kaitseks. Traktorite jõuülekandes kasutatakse ühe ja mitmekettalisi kuivi hõõrdesidureid ja hüdrosidureid. Sidureid juhitakse mehhaaniliselt ja hüdrauliliselt. Hüdrauliline sidur võimaldab sujuvat liikumise alustamist. Mehaanilisi sidureid tuleb perioodiliste hoolduste käigus reguleerida (pedaali vabakäiku ja käppade asendit).Siduri korrasolekut näitab pedaali vabakäik, mis väheneb, kui ketas kulub. Ketta suur kulumine põhjustab siduri rikke. Kulunud veetav ketas kuulub vahetamisele. Vaheülekannet kasutatakse paljude traktorite juures vaheastmena siduri ja käigukasti vahel. Vaheülekandeks võib olla kaks paari hammasrattaid või planetaarreduktor ja see võimaldab käikude arvu kahekordistada. Tööle lülitatakse vaheülekanne eraldi hoovaga. Planetaarreduktorit juhitakse hüdrauliliselt. Järgmiseks osaks jõuülekandes on paljukäiguline käigukast, mis
Haagise moodul Haagise infomoodul vabastamise kraan (allikas: Knorr) TIM (allikas: Knorr) (allikas: Knorr) Sõidupidur ei ole mõeldud pikemaajaliseks kestvaks kasutamiseks. Raske autorongi puhul võib tekkida mägedes liiklemisel kergesti olukord, kus sõidupidur kuumeneb üle, tema pidurdustõhusus väheneb või halvimal juhul pidurid lakkavad töötamast. Seepärast kasutatakse raskeveokitel ja ka bussidel lisaks kestvuspidurit. Vastavalt soovitud aeglustusele võib osa nõutavast pidurdusmomendist saada kestuspiduri EBS kasutamisest. See toimub sõidustabiilsuse nõudeid arvestades andmevahetuse abil sõiduki juhtarvutiga. Funktsiooni eesmärgiks on rattapidurite koormuse vähendamine. Kestuspiduri kaasamine lülitatakse sisse või välja lüliti abil. Kestvuspidureid on kahte liiki:
ülekandmine vedavatele ratastele või roomikutele. Lõppülekande ülekande arv on piirides 4,35 9.94. Enamikel traktoritel koosneb lõppülekanne kahest iseseisvast ülekandest, mis on paigutatud eraldi keredesse. Hammasrataste arv lõppülekannetes võib olla ühest viieni. Lõppülekande ülesannet võib täita ka planetaarmehhanism, sellisel juhul nimetatakse teda ka rattareduktoriks. On kompaktne seade ja tal on suur ülekande arv i =6. Külgsidurid Külgsidurite abil kantakse pöördemoment roomiktraktori külgülekannetele ja traktori pööramiseks lahutatakse üks külgsidur. Järsuks pööramiseks kasutatakse täiendavalt pidurit. Külgsidur on mitmekettaline sidur, mida lülitatakse tavaliselt läbi võimendi. Hüdrovõimendi rakendub tööle kui juht liigutab juhtkangi. Pidurid. Trakoritel kasutatakse ujuvat tüüpi lintpidureid. Pidurite juhtimine toimub pedaalide või juhtkangi abil.
4. Kütuse sissepritsimisnurgast. Pz peab olema normi piires, sest liiga kõrge Pz koormab liikselt väntkepsmeh - anismi laagreid, samas kui madal Pz vähendab mootori ökonoomsust. Pz reguleerimiseks tuleb: 1. Reguleerida välja kõigil silindrite Pz . 2. Kontrollida ja reguleerida võrdseks kõigi silindrite kütuse eelsisse pritsenurk 3. Kontrollida ja vajadusel reguleerida kütusepihustite pihustus kvaliteet 4. Kui eelnevad kolm punkti on tehtud, aga Pz erievus on ikka suur, siis tuleb reguleerida silindrisse antav kütuse hulka. Kütuse eelsissepritse nurga γ kontroll ja reguleerimine. Kütuse eelsissepritse nurk γ avaldab suurt mõju silindris põlemisprotsessile. Liiga suur kütuse eelsissepritse nurk γ ehk varajane sissepritse nurk põhjustab väga kõrge Pz ja kutsub esile lisa koormusi vänt – kepsmehanismis. Liiga väike kütuse eelsissepritse nurk γ ehk hiline sissepritse nurk põhjustab
Selline regulaator reageerib ainult ühele signaalile. Kui aga tekib teine signaal siis sellele peab olema oma regulaator. Sellepärast ei kasutata seda regulaatorit eraldi vaid koos esimese printsiibiga, reguleerimisparameetri parandamiseks. 3) Reguleerimine parameetri muutumise kiiruse järgi e. reguleerimine tuletise järgi. Kui parameeter hakkab muutuma, siis tavaliselt algmomendil parameetri muutumise kiirus on suur ja kui formeerida signaali kiiruse järgi ning signaal anda regulaatorile, siis hakkab ta kohe tegutsema ootamata parameetri märgatavat kõrvalekallet. Sellega suureneb reguleerimistäpsus ja regulaatori kiiretoimelisus. Automaatika süsteemide tööreziimid. Jaotatakse kahte reziimi: 1) Staatiline on selline reziim mille juures sisendsignaalid ja väljundsignaalid ei muutu aja vältel. Näiteks: mootor töötab teatud kiirusega.
Selline regulaator reageerib ainult ühele signaalile. Kui aga tekib teine signaal siis sellele peab olema oma regulaator. Sellepärast ei kasutata seda regulaatorit eraldi vaid koos esimese printsiibiga, reguleerimisparameetri parandamiseks. 3) Reguleerimine parameetri muutumise kiiruse järgi e. reguleerimine tuletise järgi. Kui parameeter hakkab muutuma, siis tavaliselt algmomendil parameetri muutumise kiirus on suur ja kui formeerida signaali kiiruse järgi ning signaal anda regulaatorile, siis hakkab ta kohe tegutsema ootamata parameetri märgatavat kõrvalekallet. Sellega suureneb reguleerimistäpsus ja regulaatori kiiretoimelisus. Automaatika süsteemide tööreziimid. Jaotatakse kahte reziimi: 1) Staatiline on selline reziim mille juures sisendsignaalid ja väljundsignaalid ei muutu aja vältel. Näiteks: mootor töötab teatud kiirusega.
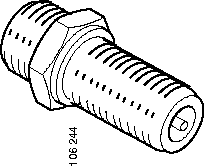
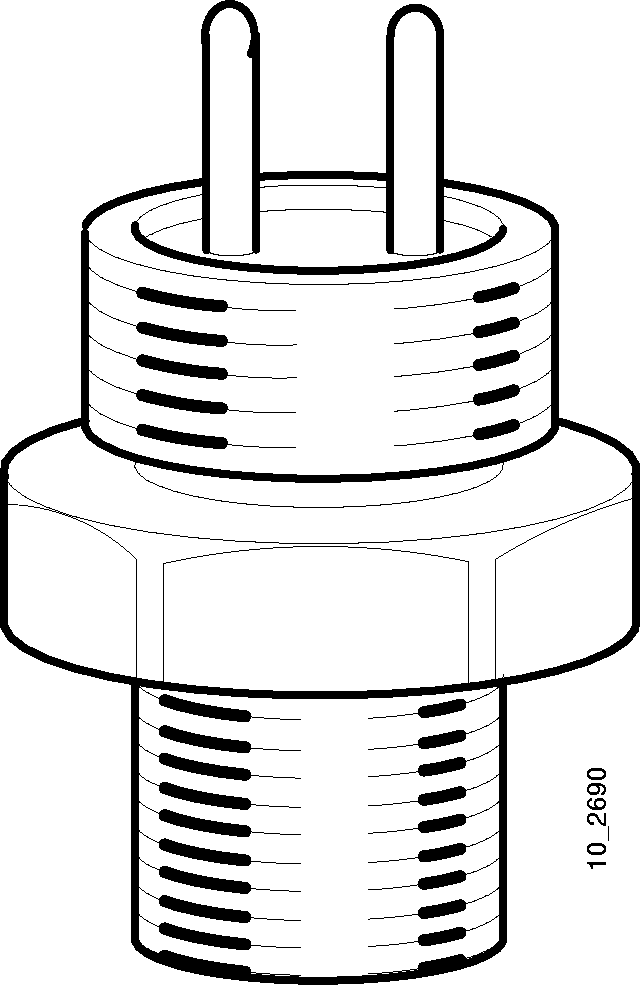
600±10 0,275 650±10 0,205 700±10 0,158 Heitgaasi rõhkude erinevust määrav andur: Andur paikneb mootori ploki küljes ja on ühendatud torudega heitgaasi rõhkude määramiseks enne ja pärast tahmafiltrit. Kui nende rõhkude erinevus on väga suur, siis viitab see tahmafiltri ummistumisele, tavaliselt tahmaosakestega. Anduris on membraan, mille ühele poole antakse heitgaasi rõhk enne tahmafiltrit ja teisele poole rõhk peale tahmafiltrit. Rõhkude erinevuse tõttu membraan paindub ja selle liikumise ulatust hindab anduri elektrooniline plokk. Vastav signaal antakse mootori arvutile. Hoiatus! Kategooriliselt on keelatud vahetada andurisse sisenevate torude asukohti see toob kaasa kogu süsteemi tööst lakkamise.
13 Dempfer Dempferina kasutatakse Geislingeri hüdrodünaamilist vibratsiooni dempferit. Dempferi sisemine osa on kinnitatud väntvõlli vööripoolse otsa külge ja ta järgib väntvõlli pöörlemisest tekkinud torsionaalvibratsiooni. Dempferi välimine osa koosneb kerest, külgkaantest, segmentidest ja vedrudest. Tänu konstruktsioonile on sisemise osa inerts väike ja välimise osa inerts suur. Kui tekib järsk pööre, siis sisemine osa painutab vedrut. Vedru ühel pool rõhk suureneb ja õli hakkab voolama läbi kitsa pilu sinna poole, kus on väiksem rõhk. Sellega summutataksegi tekkinud vibratsioon. Gaasijaotusmehhanism Gaasijaotusmehhanism koosneb nukkvõllist, tõukuritest, tõukurivarrastest, nookuritest ja klappidest. Nukkvõllid asuvad masinate külgriiulite peal. Nukkvõll on valmistatud osadest – iga silindri jaoks üks osa


































































Kõik kommentaarid