õigeks teoreetilise inertsimomendi väärtuse. 9. Katseandmed kandke tabelisse. KATSEANDMETE TABEL Silindri inertsimomendi määramine l = 1,27m m = 0,467 kg d = 0,06m ´ Katse α±U ´ (ti – t t, s ti - t ,s sin α I, kg *m2 It, kg * m2 nr (α),0 2 ) ,s 2 0,0000102 1. 7 1,766 -0,0032 0,12187 0.00019649 0.00021015 4 0,0000048 2
Eukleides:a*=fc..b*=gc...Pythagoros:a*+b*=c* ...c=2a h*=fg sin=a/c cos=b/c tan=a/b .. sin=cos(90°-a) cos=sin(90°-) tan=1/tan(90°-) .. sin*+cos*=1
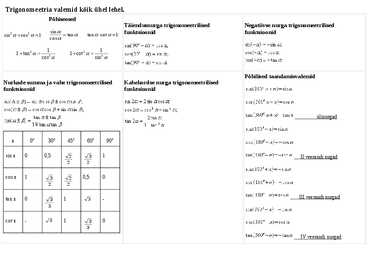
Liitmisvalemid sin(+) =sincos + cossin cos( + ) = coscos - sinsin tan + tan tan ( + ) = 1 - tan tan Taandamisvalemid NB! Vaata veerandit!!! II veerand sin(180° - ) = sin cos(180° - ) = -cos tan(180° - ) = -tan Kahekordne nurk sin2 = 2sincos cos2 = cos² - sin² 2 tan tan2 = 1 - tan 2
1. Selgitage välja väiketöövahendite ja seadmete vajadus 100 portsjoni Chilli sin carne valmistamiseks ning serveerimiseks väljastusliinis. a. Chilli sin carne Tooraine Tooraine Valmistamine 100-le kg- des Paprika punane 2,0 Loputa paprika ja eemalda sellest seemned. Kartul kooritud 40 Tükelda kõik köögiviljad Mugulsibul kooritud 3,3
Liivpinnasel, mille tugevus on määratud ainult sisehõõrdega ja millel puudub nidusus, on nõlva maksimaalne kaldenurk määratud' osakese tasakaaluga nõlva pinnal. Kui ühtlase kaldega nõlval on üks osakene tasakaalus, on tasakaalus kõik osakesed ja seega kogu nõlv. Osakese kaalu P saab jagada kaheks komponendiks - nõlvaga risti mõjuvaks jõuks N ja piki nõlva mõjuvaks jõuks T (joonis 9.1). N = P cos T = P sin . Osakest hoiab paigal hõõrdejõud T = N tan, mis peab tasakaalu korral võrduma piki nõlva mõjuva nihutava jõuga T. Seega P sin = P cos tan, millest tan = tan ja = . Seega tasakaalus oleva nõlva kaldenurk peab võrduma pinnase sisehõõrdenurgaga. Siit selgub ka, et nidususeta pinnase sisehõõrdenurga võib määrata mõõtes puistatud pinnase varikaldenurga. Tegelikkuses on varikaldenurk võrdne sisehõõrdenurgaga
) ( n- . N - !! ). . (0<360) . (.) N N . FI. . FI= raznize dollgot * sin (sirota to4ki). 14. . 15. 16. . 17. . 18. 20. . , . . . . , , . . .
U a = I r = 6,49 91,1 = 591,2V Pinge mahtuvuslik komponent: U C = I X C = 6,49 7,94 = 51,53V Pinge induktiivkomponent: U L = I X L = 6,49 6,19 = 40,17V Nurgad: r 91,1 cos = = = 0,985 Z 92,45 sin = 1 - cos 2 = 1 - 0,985 2 = 0,17 X L - X C 6,19 - 7,94 tan = = = -0,019 r 91,1 Kogu ahela vool ja P; Q; S: U 600 I= = = 6,49 A Z 92,45 P = U I cos = 600 6,49 0,985 = 3836W Q = U I sin = 600 6,49 0,17 = 662 var S = U I = 600 6,49 = 3894VA Elementide P; Q; S: 1) I=4,14A U=422,28 V R1=100 Z1=102 r 100 cos = = = 0,98 Z 102 sin = 1 - cos 2 = 1 - 0,98 2 = 0,197 P = U I cos = 422,28 4,14 0,98 = 1713W Q = U I sin = 422,28 4,14 0197 = 344,4 var S = U I = 422,28 4,14 = 1748,2VA 2) I=4,14 A U= 340,51V R2=20 Z2=82,25 cos = 0,243 sin = 0,9699
287,8 0,826086957 0,9642857143 0,0303030303 0,8 5,190457428 287,84 0,869565217 0 0,0606060606 0,84 5,463639398 287,88 0,913043478 0,0357142857 0,0909090909 0,88 5,736821367 2 andmed Emotsionaalne III Intellektuaalne III Sotsiaalne III Füüsiline sin Emotsionaalne sin Intellektuaalne sin 0,2243994753 1,5231964381 4,775220833 -0,94226092 0,222520934 0,9988673392 0,4487989505 1,7135959929 5,026548246 -0,99766877 0,4338837391 0,9898214419 0,6731984258 1,9039955476 5,277875658 -0,97908409 0,6234898019 0,9450008187 0,897597901 2,0943951024 5,52920307 -0,88788522 0,7818314825 0,8660254038
mediaani suhtes 2:1 vastavast tipust arvates. Kolmnurga külgede keskristsirged lõikuvad kõik ühes punktis, mis on kolmnurga ümberringjoone keskpunktiks (raadius R on keskpunkti kaugus kolmnurga tipust). Siinusteoreem: kolmnurga küljed on võrdelised vastasnurkade siinustega ehk a b c = = = 2R . sin sin sin Koosinusteoreem: kolmnurga ühe külje ruut on võrdne ülejäänud külgede ruutude summaga, millest on lahutatud nende külgede kahekordne korrutis samade külgede vahelise nurga koosinusega ehk a 2 = b 2 + c 2 - 2bc cos , b 2 = a 2 + c 2 - 2ac cos , c 2 = a 2 + b 2 - 2ab cos . Kolmnurga pindala arvutamise valemid: ah
x (radiaanides) 0 3 2 6 4 3 2 2 3.2 Teravnurga trigonomeetrilised funktsioonid Täisnurkse kolmnurga teravnurkade trigonomeetrilised funktsioonid on järgmised. vastaskaatet a b Teravnurga siinus = ; sin = , sin = hüpotenuus c c lähiskaatet b a c Teravnurga koosinus = ; cos = , cos = a hüpotenuus c c vastaskaatet a b Teravnurga tangens = ; tan = , tan =
Teravnurga siinus ja koosinus Täisnurkse kolmnurga teravnurga siinuseks nim. selle nurga vastas kaateti ja a vastaskaatet hüpotenuusi suhet ning seda tähistatakse c . sin = hüpotenuus Täisnurkse kolmnurga teravnurga koosinuseks nim. selle nurga lähis kaateti ja b lähiskaatet hüpotenuusi suhet ning seda tähistatakse c . cos = hüpotenuus vastaskaatet hüpotenuus lähiska lähiskaatet Teravnurga tangens Täisnurkse kolmnurga teravnurga tangensiks nim. selle nurga vastas kaateti ja
Trigonomeetria valemid kõik ühel lehel. Põhiseosed Täiendusnurga trigonomeetrilised Negatiivse nurga trigonomeetrilised sin sin 2 + cos 2 = 1 = tan tan cot = 1 funktsioonid funktsioonid cos 1 1 1 + tan 2 = 1 + cot 2 = cos 2 sin 2 Põhilised taandamisvalemid
Trigonomeetria valemid kõik ühel lehel. Põhiseosed Täiendusnurga trigonomeetrilised Negatiivse nurga trigonomeetrilised sin sin 2 + cos 2 = 1 = tan tan cot = 1 funktsioonid funktsioonid cos 1 1 1 + tan 2 = 1 + cot 2 = cos 2 sin 2 Põhilised taandamisvalemid
b = 45 cm H=? f = 1,45 GHz V=? = 106 kraadi = 1,85 rad D = 2 km = 9 kraadi = 0,157 rad = 10 kraadi = 0,174 rad c = 3*108 m/s Lahendus: Metallplaadi pindala on: S = a*b = 0,1935 m2 Lainepikkus on: c = = 0,2069 m f Metallplaadi efektiivne pindala on leitav valemiga: 8 2 S2 sin x a = 4 cos 2 , kus x = 2 sin 2 x sin( x) a Kuna oluline on ainult esimene periood, siis võib olla ainult vahemikus 0...1. x a 0,43 a Seega = = 2,0783 ning esimese perioodi jaoks = 2,0783 - 2 = 0,0783
1. . 2. . 3. . 4. . 6. . ) . - . , , . . . . ( ) "-", . 0 90, "+". () , , "" 0, - , . . . . () . , , ) - . : , 0 180 6- , (24-) , . ...
x x e '=e Logaritmfunktsioon 1 1 ln x ' = x x dx=lnxC 1 log a x '= x ln a Trigonomeetrilised sin x ' =cos x sin x dx=-cos xC funktsioonid cos x ' =-sin x 1 cos x dx=sin xC tan x' = 2 1 cos x cos 2 x dx=tan xC 1 cot x '=- 2 1 sin x sin2 x dx=-cot xC
, Soomer, V. Matemaatilise analüüsi algkursus. "TÜ Kirjastus", Tartu, 2006. [4] Tõnso, T., Veelmaa, A. Matemaatika XII klassile. "Mathema", Tallinn, 1995. [5] Piskunov, N. Diferentsiaal- ja integraalarvutus. "Valgus", Tallinn, 1981. 3.1 Algfunktsioon ja määramata integraal Kursuse eelnevas osas käsitlesime ühe muutuja funktsiooni y = f (x) tuletise y = f (x) leid- misega seotud küsimusi. Teame, et funktsiooni f (x) = 2x tuletis on f (x) = 2 ja funktsiooni f (x) = sin x tuletis on f (x) = cos x. Vaatleme nüüd vastupidist ülesannet. Olgu antud funktsioon y = f (x). Kuidas leida sellist funktsiooni y = F (x), mille tuletiseks oleks antud funktsioon y = f (x), st kuidas leida funktsiooni y = F (x), kui on teada, et F (x) = f (x)? Funktsioon f (x) = 2x osutub näiteks funktsiooni F (x) = x2 tuletiseks, funktsioon f (x) = sin x on aga funktsiooni F (x) = - cos x tuletiseks. Sel juhul öeldakse, et funktsioon F (x) = x2 on
Võrrandid Võrrandi mõiste Võrrand on muutujaid sisaldav võrdus, milles üks või mitu muutujat loetakse tundmatuks (otsitavaks). Näited Ruutvõrrand: x2 2x 1 0 Trigonomeetriline võrrand: sin t cos 2t 1 Eksponentvõrrand x suhtes: e 2 x e 2 x 2a 1 lineaarne võrrand a suhtes: Juurvõrrand x ja y suhtes: x y x 2 2 xy Logaritmvõrrand: log u (2u u 2 ) 3 Võrrandi lahend Tundmatu (muutuja, otsitava) väärtust, mille korral võrrand osutub samasuseks, nimetatakse võrrandi lahendiks ehk juureks. Näide Võrrandi 2x 3 0 3 lahendiks on x , 2
erinevad ainult imaginaarosa märgi poolest. kui AT A. Astendamine: Kompleksarv võrdub nulliga siis, kui x 0 ja iy 0, kus n = rn (cos n + sin n) x reaalosa yi immaginaarosa Juurimine: n z= nr (cos (+2k)/n+ i sin (+2k)/n) Komplesarvude liitmine: 1 Z2 x1 iy1 x2 iy2 Euleri valem: = r(cos + isin) = rei
Ülesanne 3 Autod ja traktorid II Sõiduki kütuse erikulu TA III Martin Leopard 1. Sõiduki mark: BMW 523i 125kW 1996 a 2. Lähteandmed ü := 0.93 m g = 9.807 Raskuskiirendus 2 s f := 0.013 veeretakistus kg gm := 1.225 = 1.225 15 kraadi celsiuse juures, õhu tihedus. 3 L m cd := 0.50 tuuletakistus kg 330 0.001 -5 b e := 330 b e := = 9.167 × 10 kW s 3600 - 5 kg b e := 9.167 × 10 Kütuse erikulu kW ...
x (radiaanides) 0 3 2 6 4 3 2 2 3.2 Teravnurga trigonomeetrilised funktsioonid Täisnurkse kolmnurga teravnurkade trigonomeetrilised funktsioonid on järgmised. vastaskaatet a b Teravnurga siinus ; sin , sin hüpotenuus c c lähiskaatet b a c Teravnurga koosinus ; cos , cos a hüpotenuus c c vastaskaatet a b
Leidke kuhja tipu ning katuse tipu vaheline kaugus. 5. (1998) Leidke funktsiooni y = x3 -4x2 3x -2 kasvamis- ja kahanemisvahemikud, maksimum- ja miinimumkoht. 6. (1998) On antud funktsioon f(x) = x2 2 ln x + 3. 1 1) Leidke f e 2 . 2) Leidke funktsiooni f(x) kasvamisvahemik ja ekstreemumid. 3) Lahendage võrrand f(x) = g(x), kus g(x) = x2 + ln2 x. 7. (1998) On antud funktsioon f(x) = sin x cos x. 1) Lihtsustage avaldist f(x) f(-x). 2) Lahendage võrrand f(x) = 1 3) Lahendage võrratus f(x) > 0 lõigus 0, . 4) Leidke funktsiooni f(x) miinimumkoht vahemikus (0; 2) ja arvutage funktsiooni väärtus sellel kohal. 1 8. Antud on funktsioon f ( x ) x 2 x 2 . 1) Leidke funktsooni f(x) määramispiirkond. 2) Leidke funktsiooni f(x) kasvamis- ja kahanemisvahemik.
r 0, , siis ( x) järk = ( x) järk ( x) Kui lim = 1 , siis (x) ja (x) on ekvivalentsed x x ( x) 0 Definitsioon 3 Lõpmatult väheneva suuruse (x) järguks nim. sellist arvu n, mille korral ( x) lim = r 0, x x0 ( x - x ) n 0 © 2001 - Ivari Horm ([email protected]), Toomas Sarv 5 sin x Piirväärtus lim =1 (tõestusega). Arv e ja piirväärtus lim (1 + x ) 1 x
s.t. kui nende reaalosad on võrdsed ja imaginaarosad on võrdsed; 2) kompleksarv võrdub nulliga, s.o. z = a + bi = 0 siis ja ainult siis, kui a = 0 ja b = 0 . Tähistame punkti A ( a ; b ) polaarkoordinaadid tähtedega ja r ( r 0 ) , lugedes pooluseks koordinaatide alguspunkti ja polaarteljeks x-telje positiivse suuna. Siis kehtivad seosed: a = r cos , b = r sin . Järelikult saab kompleksarvu z esitada kujul z = a + bi = r cos + ir sin ehk z = r ( cos + i sin ) . (3) Avaldist võrduse paremal poolel nimetatakse kompleksarvu z = a + bi trigonomeetriliseks kujuks; suurust r nimetatakse kompleksarvu z mooduliks ja suurust selle kompleksarvu argumendiks; neid tähistatakse järgmiselt: r = z , = arg z . 2
asukoha suvalisel ajahetkel. Konkreetsuse mõttes vaatleme ristlainet xz-tasandil. Võnkumine toimub z-telje sihis, laine liigub x-telje sihis. Otsime lainefunktsiooni z = z(x,t) ehk küsime, kuidas saame arvutada punkti kauguse tasakaaluasendist kaugusel x ajahetkel t. Ruumipunktis x = 0 toimub harmooniline võnkumine. Siin ruumipunktis saame punkti hälbe (z-koordinaadi) arvutada võnkumise valemist z (0, t ) = r sin t Oletame, et laine levib x-telje positiivses suunas. Siis toimub igas ruumipunktis x samasugune võnkumine, ainult teatud hilinemisega. Hilinemise saab arvutada, kui on teada laine levimise kiirus u, sest häiritus liigub ruumipunktist x = 0 ruumipunkti x ajaga x/u. Järelikult ruumipunktis x ajal t on võnkumine samasugune, nagu see oli ruumipunktis x = 0 ajal t x/u, so teatud aja võrra varem. Järelikult saame hälbe ruumipunktis x arvutada valemist x
!"# $ %% & ' '()*''(+*'&+( %% , - %%$ .- ,, /0 0 Katseandmete tabel Silindri inertsimomendi määramine. l = ......±........., m = ......±........., d =......±......... Katse t i t, s o t, s (t i t) 2 , s 2 sin I, kg m 2 I t , kg m 2 nr. 1. 2. 3. 4. 5. t .......... .......... Arvutused ja veaarvutused m=0.2258 kg 2 10 4 kg d r 0.02990 m 2 d 5 10 5 m 2 m g 9.818 2 s t 1.52604 s t 4, 0.95 2.8 (t t ) 2 1.89952 10 4 5 i 1 i (t n t )2 1.89952 10 4
: 1 f ( x ) = arcsin ( 3 x - 9) + . 2 2 2 x - 5 x +1 x -8 1 -x2 2. xlim . 3. lim 3 . 4. lim . 3 3x 6 + 7 x8 x -2 x 1 sin (x ) x -1 5. lim x +2 . 6. xlim x x 2 + 1 - x . 7. xlim ( ln( 2 x + 1) - ln( x + 2) ) . x x + 3 + x 2 -4 8
m1g 2n P2 Joonis 1.4 m2g 27 N a) Fky = 0 : YO + 1t cos + 2t cos + 1n sin + 2n sin = 0 , (1.9a) k =1 N b) Fkz = 0 : Z O - m1 g - m2 g + 1t sin + 2t sin - 1n cos - 2n cos = 0 , (1.9b) k =1 N l l c) M Ox ( Fk ) = 0 : M 1 + 1t 2 + 2t l - m1 g sin - m2 g l sin = 0 . 2
Leo Teder Antud andmed: B r = 500 mm a = 700 mm h =1600 mm = 60 min-1 1) Määrata vedava lüli punkti A kordinaadid funktsioonina nurgast . A Ax Ay r Ax = r * sin Ay = r * cos Punkit A kordinaadid: A{r*sin ; r*cos } 0 2) Määrata liuguri punkti B horisontaalkordinaat Bx funktsioonina nurgast . Ax rsin Bx tan = a+ A y -> tan = a+rcos tan =
sin α = a/c sin β = b/c cos α = b/c cos β = a/c cos α = sin(90o-α) tan α = a/b tan β = b/a tan α = 1/tan(90o- α)
19. P¨o¨ordfunktsiooni tuletis 20. Liitfunktsiooni tuletis 21. Logaritmiline diferentseerimine 22. Ilmutamata funktsiooni tuletis 23. Parameetrilisel kujul esitatud funktsiooni tuletis 24. Funktsiooni diferentsiaal 25. K~orgemat j¨arku tuletised 26. Joone puutuja ja normaali v~orrandid 27. Rolle'i teoreem 28. Cauchy teoreem 29. Lagrange'i teoreem 30. L'Hospitali reegel 31. L'Hospitali reegel teistel m¨aa¨ramatuse juhtudel 32. Taylori valem 33. Funktsioonide ex , sin x ja cos x arendid Maclaurini valemi j¨argi 34. Funktsiooni kasvamine ja kahanemine 35. Funktsiooni lokaalsed ekstreemumid 36. Funktsiooni suurim ja v¨ahim v¨a¨artus antud l~oigul 37. Funktsiooni graafiku kumerus ja n~ogusus. K¨aa¨nupunktid 38. Funktsiooni graafiku as¨ umptoodid 39. Algfunktsioon ja m¨aa¨ramata integraal 40. Integraalide tabel 2 41. M¨aa¨ramata integraali omadusi 42
Joonis 7.7 · suurim normaalpinge (peapinge) mõjub mingil kaldpinnal (ristlõikepinna suhtes); · selle kaldpinna normaalpinge väärtuse saab arvutada taskaalutingimusest, kui ristlõikepinna pinged x ja xy ning pikilõike pinged y ja yx on teada: Fn = 0 N - N x cos - N y sin + Q xy sin + Q yx cos = 0 Ft = 0 Q - N x sin - N y cos + Q xy cos + Q yx sin = 0 · lugedes pingete laotused üle kaldlõikega mahuelemendi külgede (pindaladega dA,dAx ja dAy) ühtlasteks saab sisejõud avaldada (mahuaelemendi külgede pindalad on seotud trigonomeetriliste valemitega):
9. Polaarkoordinaadid ja nende seos ristkoordinaatidega. Kahekordse integraali teisendamine polaarkoordinaatidesse Olgu punkt A(a,b) fikseeritud punkt tasandil. Punkti P(x,y) polaarkoordinaatideks punkti A suhtes nimetatakse arvupaari ja , kus =|PA|=(x-a)2+(y-b)2 ja on nurk, mis tekib liikumisel x-telje suunaliselt vektorilt vektorile AP vastupäeva. Kokkuleppeliselt ]-,] x=cos+a x'=cos x'=-sin y=sin+b y'=sin y'=cos cos - sin J ( ,) = = cos 2 + sin 2 = sin cos Seega f ( x, y )dxdy = f ( cos + a, sin + b) dd D D' 10. Tuletada valem tasandilise kujundi massi arvutamiseks aine ruumitiheduse kaudu Vaatleme tasandilist piirkonda D, mis on kaetud mingi ainega nii, et piirkonna iga pindalaühiku kohta tuleb teatud hulk seda ainet. Valime piirkonnas D suvalise osapiirkonna S
kolmanda astme Taylori pol¨ unoom punktis 0. 3. Arvutada piirv¨aa¨rtus l'Hospitali reeglit kasutades: x3 - 5x2 + 3x + 9 lim . x3 x3 - 8x2 + 21x - 18 4. Arvutada piirv¨aa¨rtus l'Hospitali reeglit kasutades: (1 - x)2 lim . x1 1 - sin x 2 5. Arvutada piirv¨aa¨rtus l'Hospitali reeglit kasutades: lim arcsin x cot x . x0 6. Arvutada piirv¨aa¨rtus l'Hospitali reeglit kasutades: x 1 lim - . x1 x - 1 ln x 7. Leida funktsiooni f (x) = 6 + 8x3 - x4
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Matriklinumber: Rühm: MAHB41 Kuupäev: 08.05.2012 Õppejõud: Merle Randrüüt Ülesanne 1 r = OA = 250mm = AC = 900mm ja a) Punkti A koordinaadid , sõltuvus funktsiooni pöördenurgast b) Määrata punkti C koordinaadid xC , yC funktsioonina pöördenurgast c) Matlab-i kood r = 0.25; l = 0.9; xB = 0.4 yB = 0.3; phi = linspace (0, 2*pi, 361); xC = zeros(1, 361); yC = zeros(1, 361); %Tsükkel for k=1:361 gamma = atan((xBr*cos(phi(k)))/(yBr*sin(phi(k)))); xA = r*cos(phi(k)); yA = r*sin(phi(k)); xC(k) = xA+l*sin(gamma); yC(k) = yA+l*cos(gamma); end figure(1) hold off plot(xC, yC, 'linewidth', 2) title('Punkti C trajektoor') xlabel('x [m]') ylabel('y [m]'...
Funktsioonide variandid (valida õppemärkmiku viimase numbri 0 cos x 5 2 x x 2 sin( x + 1) 3 + cos a F1 = ln(x 2 + 3) + cos 2 x 2 F1 = 3 x +x +3 x 2 x 2 sin -3 sin x> a 3 cos2 2 x 2 sin x + 1 x 2 5 - < F2 = 3 x + 2 3 cos x 2 x F2 = 4 cos - 2 sin + 2 cos( x + 3) x 3 3 x2 + 3 5
Valguslaine on ristlaine, mis koosneb ristsuunas võnkuvaist elektri- ja magnetväljast.Lainepikkus (ühik nm) näitab kaugust valguslaine kahe samas võnkefaasis oleva naaberpunkti vahel. Laineperiood T (1s) näitab aega, mis kulub valguslainel ühe lainepikkuse läbimiseks. Laine sagedus f (1 Hz) näitab, mitu võnget teeb laine ajaühikus. Laine kiirus v (1 m/s) näitab, kui pika tee läbib laine ajaühikus. v = f = /T. c valguse kiirus vaakumis. c = 3·108 m/s. Laine faas määrab ära muutuva suuruse väärtuse antud aja hetkel. Valguse intensiivsus l näitab, kui palju energiat kannab valguslaine ajaühikus läbi pinnaühiku. Põhivärvusteks on punane, roheline ja sinine. Kõige tugevama aistingu annab roheline värvus. Infravalguseks ehk soojuskiirguseks nim elektromagnetlaineid, mille lainepikkus on suurem kui punasel valgusel. Ultravalguseks nim el.magnetlaineid, mille lainepikkus on väiksem kui violetsel valgusel. Nähtust, kus lained painduvad tõkete...
vastavalt sellele, kui lihtsalt nad ümbermagneetuvad. Kasutatakse nt tundlike mõõteseadmete ,,kaitsmiseks" väliste segavate magnetväljade eest. 3. Elektromagnetilise induktsiooni seadus: Induktsioon elektromotoorjõud ona arvuliselt võrdne kontuuri läbiva magnetvoo muutumise kiirusega. Induktsiooni seadus ehk Faraday seadus, valemi kujul: =-(/t), kus = elektromotoorjõud = magnetvoo muut ja t= aja muut. Magnevoog on võrdne magnetilise induktsiooni, kontuuri pindala ja sin korrutisega ehk =BS*sin , kus sin on nurk magnetvälja ja kontuuri tasapinna vahel . Miinus märk valemis tuleb Lenzi reeglist ehk induktsioonvoolu suund on alati selline, et tema magnetväli püüab takistada muutust, mis põhjustab induktsioonvoolu. Induktsioonvoolu tugevuse saame arvutada Ohmi seadusest, teades väärtust. 4. Eneseinduktsiooni nähtus ja näide koos seletustega: Eneseinduktsioon on elektromagnetilise induktsiooni alaliik. Seisnen selles, et muutuv
ax2 + bx + c = 0 taandamata ruutvõrrand ; lahend x1 + x2 = -p ; x1 · x2 = q - viete valemid. Kus x1 ja x2 on taandatud ruutvõrrandi lahendid. ax2 + bx + c ( ruutkolmliikme lahutamine teguriteks) : ax2 + bx + c = a(x-x1)(x-x2). x1 ja x2 ruutvõrrandi lahendid. DETERMINANDID = a ·d - c·b. = aei + cdh +bfg gec ahf dbi. TRIGONOMEETRIA PÕHISEOSED sin2 + cos2 = 1 1 + cot2 a = tan = tan a cot a =1 1+ tan2 a = TÄIENDUSNURGA VALEMID sin (90 - a) =cos a cos (90 - a) = sin a tan (90 - a) = 1/tan a = cot a cot (90 - a) = 1/cot a = tan a NEGATIIVSE NURGA SIINUS,KOOSINUS,TANGENS JA KOOTANGENS. sin (- a) = -sin a cos (- a) = cos a tan (- a) = -tan a cot (- a) = -cot a KAHEKORDSE NURGA SIINUS, KOOSINUS, TANGENS JA KOOTANGENS. sin 2a =2sin a cos a cos 2a =cos2 a - sin2 a cos 2a = 2 cos2 a -1 cos 2a = 1- 2 sin2 a tan 2a = 2 tan a/ (1 - tan2 a) cot 2a = cot2 a - 1/ (2cot a)
ja y vahelist ligikaudset sõltuvust. Vähimruutude meetod: see on üks võimalus, mille kaudu saab leida võimalikult head empiirilist valemit y = f(x). Põhiideeks on leida valemis esinevad arvkordajad nii, et valemi põhjal arvutatud suuruste f(xi) ja katseandmete yi vahede ruutude summa oleks minimaalne. Erinevaid lähendfunktsioone: o Lineaarfunktsioon y = ax + b o Ruutfunktsioon y = ax2 + bx + c o y = aebx o y = a log x o y = a sin bx Arvutamine (lineaarsel juhul): o Kõigepealt saadakse katseandmed tabelina, kus on kirjas x ja y väärtused. o Edasi moodustatakse tabel, kus on eraldi veergudes kirjas i katsete arv, xi väärtus mingi katse korral, yi väärtus mingi katse korral, xi2 - väärtuse ruut mingi katse korral ja xiyi x ja y väärtuste korrutis mingi katse korral. Iga veeru lõpus on veergude summa. o Edasi moodustatakse normaalvõrrandite süsteem, millega määratakse ära kordajad a ja b.
d3= 189,0-89,0=100,0 m d4= 213,0-189,0=24,0 m d5= 288,0-213,0=75,0 m d6= 340,12-288,0=52,12 m IS horisontaalprojektsioon: IS = d i × cos i S1 = 31,0m × cos 2,5° = 30,97m S 2 = 58,0m × cos 3,3° = 57,90m S 3 = 100,0m × cos 2,1° = 99,93m 2 2 IS = d i - hi S4 = ( 24,0m ) 2 - ( + 7,4m ) 2 = 22,83m S5 = ( 75,0m ) 2 - ( + 2,8m ) 2 = 74,95m S6 = ( 52,12m ) 2 - ( - 5,3m ) 2 = 51,85m Kaldest tingitud parandid: d i = 2 × d i × sin 2 2 + 2,5° d 1 = 2 × 31,0m × sin 2 = 0,03 2 d 2 = 2 × 58,0m × sin 2 ( - 3,3°) = 0,096 2 d 3 = 2 ×100,0m × sin 2 ( + 2,1°) = 0,07 2 2 hi d i = 2d i d 4 = ( + 7,4m ) 2 = 1,14m 2 × 24,0m d 5 =
1. Reaaltelg ja (x-telg) 13.2. Imaginaartelg (y-telg) · Kuidas võrrelda kompleksarve? Pole järjestatud hulk. Aga ikkagi ... 14. Kompleksarvu trigonomeetriline kuju- · Kujutagu punkt P kompleksarvu z=a+bi · Avaldame joonisel olevast täisnurksest kolmnurgast reaalosa a ja imaginaarosa b nurga (kompleksarvu argument) ja mooduli kaudu ning asendame algebralisel kujul antud kompleksarvu. · a + bi = r (cos + i sin ) Saame: · Paneme tähele, et lisades nurgale täispöördeid, saame alati sama kompleksarvu, seega ka a + bi = r (cos( + 2n ) + i sin( + 2n )) 15. Funktsiooni mõiste- · Piirdume vaid arvuhulkadel määratud funktsioonidega. · Kui igale arvule x hulgast X on mingi eeskirja f järgi seatud vastavusse üks kindel arv y hulgast Y, siis öeldakse, et hulgas X on määratud funktsioon y=f(x) ja seda kirjutatakse kujul y=f(x) , kus xX.
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Dünaamika Kodutöö nr. 2 Variant nr. 2(4) Üliõpilane: Jimmy Hooligan Matriklinumber: -----32 Rühm: FA21 Kuupäev: 22.06.1941 Õppejõud: Leo Teder 2013 Ülesanne 1: Antud: m1=1.5kg m2=2kg m3=2kg m4=9kg u=0.3 M=15Nm s=0.6m ____________ Süsteem koosneb kehast 1 massiga m1 , silindritest 2 ja 3 massidega vastavalt m2 ja m3 ja raadiusega r = 0.5 m ning kehast 4 massiga m4. Keha 1 libiseb kaldpinnal kaldenurgaga = 30 ja hõõrdeteguriga . Silindrile 2 mõjub jõupaar momendiga M . Leida keha 1 kiirus ja kiirendus hetkel kui keha 1 on liikunud üles mööda kaldpinda teepikkuse s võrra. Vaja leida a(s) ja vs(s) Lahendus: T1= T2= T3=+ T4= N=cos*FG1 WFH= -uNs=-0,3*cos * ...
G a 0 m/s 2 [ ] F [N] G [ ] F0 N [ ] FS N F [N ] N FR[ N ] FT [ N ] Fr [ N ] M i [Nm] F y [N ] Fz [ N ] sin cos FG = pGA F0 =m0a0 F N =F S *sin FT =F S *sin(+ ) M i=F Tr F z =F r *cos +F 0 a 0=r 2 ( cos + *cos2 ) F S =( F G-F 0 )/cos F R=F S *cos(+ ) Fr =mrr2 F y= Fr *sin
Mathcad 6.0 Plus. , - , 2001. 189. : , , - - . Mathcad 6.0 Plus. . " - " , . . 2. . 155. .: 14 . .. , . . , . 3 1. 1.1. 1.1.1. -- x(t) = x(t+mT), T -- , m - - , m= 1, 2, .... x(t) - x(t ) = a 0 + (a k cos k1 t + b k sin k1 t ) =a 0 + A k cos(k1t + k ) (1.1) k =1 k =1 1 = 2 -- 1- ; a 0 , a k b k -- T , : t +T t +T t +T 1 2 2 a0 = T t x(t )dt ; a k = T t
Funktsioone f ja g nimetatakse liitfunktsiooni g(f (x)) koostisosadeks. N¨aites 3 esitatud funktsioon on liitfunktsioon x - 4 - x2 - 4 - x2 , samuti N¨ aites 4 esitatud funktsioon x - 1 - x - log(1 - x). oib koostisosi olla rohkem kui kaks. N¨aiteks funktsioonil cos2 sin x on Liitfunktsioonil v~ koostisosi neli: x sin x sin x cos sin x cos2 sin x. Definitsioon 5. Funktsiooni f , mille m¨a¨aramispiirkond X on s¨ ummeetriline nullpunkti suhtes, nimetatakse paarisfunktsiooniks, kui x X : f (-x) = f (x). 13 Definitsioon 6
a ja b on täisnurkse kolmnurga kaatetid, c on hüpotenuus. Teravnurga vastaskaatet on a ja lähiskaatet on b. a c Teravnurga vastaskaatet on b ja lähiskaatet on a. Teravnurkade ja summa + = 90°. b Teravnurga siinuseks nimetatakse selle nurga vastaskaateti ja hüpotenuusi suhet (jagatist). Nurga siinust tähistatakse sümboliga sin . a b sin = sin = c c Teravnurga koosiniseks nimetatakse selle nurga lähiskaatei ja hüpotenuusi suhet. Nurga koosinust tähistatakse sümboliga cos b a cos = cos = c c Teravnurga tangensiks nimetatakse selle nurga vastaskaateti ja lähiskaateti suhet. Nurga tangensit tähistatakse sümboliga tan
Funktsionaaldeterminant ehk jakobiaan ja ta on järgmine: u v . Üleminek y y u v ristkoordinaatidelt polaarkoordinaatidele on üks enamlevinud juhtum muutujate vahetusest kahekordses integraalis. Sel juhul u = ja v = : x = cos , y = sin . Leiame ristkoordinaatide x ja y polaarkoordinaatideks ja x x teisendamise jakobiaani: v = - sin cos = - sin 2 - cos 2 = - Järelikult I= u y y cos sin u v 2 ( )
b) Lähendades poolile püsimagneti lõunapooluse, tekib magnetvälja otsa põhjapoolus. c) Eemaldades poolist püsimagneti lõunapooluse, tekib magnetvälja otsa põhjapoolus. d) Eemaldades poolist püsimagneti põhjapooluse, tekib magnetvälja otsa lõunapoolus. 5) Induktiivsus sõltub voolu suutlikusest tekitada antud jutmesüsteemis vagnetvoogu; voolu muutusest; selleks kulunud ajast; juhi induktiivsusest ja elektromotoorjõust. 6) l = 1 m sin = U : v * l * B v = 0,5 m/s B = 8 mT = 0,008 T sin = 0,002: 1*0,5*0,008=0,5 U = 2 mV = 0,002 V sin 0,5 = 30º sin = ? Vastus: 30 º jõujoonte nurga all liigub juhe. 7) t = 0,2 s = - :t = 5*10' -5 Wb = 5*10 -5 : 0,2= -2,5*10'-4 8) 9) 10) Kui suure jõuga mõjutab magnetväli 30cm pikkust juhti, mis paikneb risti induktsioonivektoriga
gh= v²/2(I/mr²+1) (3) Veereva keha masskese liigub kaldpinnalt alla ühtlaselt kiirenevalt ja sirgjooneliselt. Tema kiirendus ja lõppkiirus avalduvad järgmiselt: a = 2l / t² v = a· t = 2l / t kus l - kaldpinna pikkus t - allaveeremise aeg Kaldpinna kõrguse saab leida pikkuse l ja kaldenurga järgi: h = l sin Asendades valemis ( 3 ) kiiruse avaldisega ( 4 ) , saadakse pärast teisendusi inertsmomendi jaoks valem : I= mr²(g t² sin /2l - 1) Suurused m , r , l ja t mõõdetakse katse käigus. sin antakse ette õppejõu poolt. kats l,m t,s m, d,m R, m I , kgm² It , kgm² võrdlus e kg nr 1. 0,938 1,85 0,155 0,025 0,0125 13,05*10-6 12,1*10-6 7,85%