taktihetkedeks. Enamik tehnilisi süsteeme on diskreetsed, diskreetne signaal on arvude jada. Dünaamiliste süsteemide modelleerimine. Milliseid mudeleid kasutatakse lineaarsete statsionaarsete pidevaja süsteemide kirjeldamisel? Algolekud – nullised ja mittenullised. Avage nende sisu. Millistel tingimustel ja eeldustel on pidevaja süsteem esitatav ekvivalentse diskreetaja süsteemina? Avage probleemi olemus ja tähtsus süsteemiteooria seisukohalt. Dünaamiliste süsteemide modelleerimine: Modelleerimisel tehakse kindlaks vajalik sisendite arv ning sisendite seos väljunditega. Süsteemi matemaatilise mudeli liigid: 1.Algebralised, seovad omavahel muutujate iga ajahetke väärtusi. 2. Diferentsiaalvõrrandid, seovad muutujaid kirjeldavaid ajafunktsioone. 3. Lineaarsed võrrandid, võivad sisaldada liikmetena vaid muutujaid esimeses astmes, muutujate
Diskreetaja süsteem: süsteem, mille puhul süsteemi muutujate hetkväärtused ehk diskreedid on määratud vaid teatavatel isoleeritud ajahetkedel ja mille puhul vahepealsed ajahetked loetakse puuduvaiks. Diskreetsed ajahetked erinevad võrdse ajaintervalli võrra, mida nimetatakse taktiks ning ajahetki taktihetkedeks. Millistel tingimustel ja eeldustel on pidevaja süsteem esitatav ekvivalentse diskreetaja süsteemina? Avage probleemi olemus ja tähtsus süsteemiteooria seisukohalt: 3. Lineaarse statsionaarse pidevaja süsteemi sisend-väljund mudelid- Lineaarse statsionaarase pidevaja süsteemi sisend-valjund mudelid kirjeldavad signaalide ülekannet. Näiteks ülekandefunktsioon, impulsskaja, hüppekaja ja sageduskarakteristik. Ülekandemudel kajastab süsteemi sisend- ja valjundmuutujate otsest seost. Tüüpiline ühe sisendmuutuja u(t) ja väljundmuutujaga y(t) lineaarse süsteemi matemaatiline mudel (sile süsteem) on
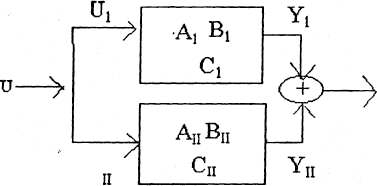
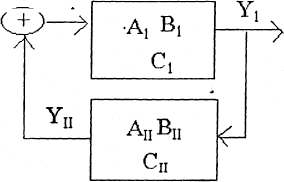
Ühendamise puhul peavad erinevate süsteemide teatavad muutujad olema samad või siis moodustub uus muutuja, mis on nende muutujate summa. agasisideühendusel on võime tekitada kogusüsteemile teistsuguseid omaväärtusi, omab see põhimõttelist tähtsust. Kui näiteks osasüsteemi dünaamilised omadused meid ei rahulda, siis ühendades külge täiendava osasüsteemi võime saavutada kogusüsteemile sobivad omadused. See on süsteemiteooria ja -tehnika olulisematest tulemustest. See kinnitab ka printsiipi: keerukas süsteemis on võimalikud omadused, mida lihtsamates ei õnnestu realiseerida. Kui väljendada tagasisideühenduse eripära olekugraafidele omase tehnoloogia kaudu võime öelda, et tagasisideühendus loob süsteemis täiendavaid suletud tuure, mis aga muudavad süsteemi determinanti ja sellega ka omaväärtusi. 7.1Lineaarse statsionaarse diskreetaja süsteemi sisend-väljund mudelid (ehk ülekandemudelid)
Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teoreetilise kursuse käigus läbivõetavate teemade kohta. Igas peatükis on nn näidisülesanded (täieliku lahenduskäiguga) ja ülesanded iseseisvaks lahendamiseks (mille kohta on ülesannete kogu lõpus toodud vastused ja mõnikord ka vahetulemused). Autorid on kasutanud samu tähiseid, mis on kasutusel H. Sillamaa raamatus, välja arvatud diskreetsete süsteemide maatriksite tähistus, kus F ja G asemel kasutatakse kreeka tähti ja . Selle aine õpetamise pikaajaline kogemus näitas sellise ülesannete kogu vajalikkust. Kõik märkused, soovitused ja teated avastatud vigadest on teretulnud. Autorid tänavad oma kolleegi professor Ennu Rüsterni asjalike märkuste ja soovituste eest
Automaatika alused 1. Põhimõisted 1.1 Milles seisneb automaatjuhtimine? Automaatika on teaduse ja tehnika haru, mis tegeleb automaatseadmete ning automatiseeritavate tehniliste protsesside kontrollimise ja juhtimise meetodite ja vahenditega. Definitsiooni kohaselt on automaatikal kaks põhiharu: automaatkontroll ja automaatjuhtimine. 1.2 Milles seisneb süsteemi orienteeritus? Süsteemi orientatsioon e suunatoime väljendub süsteemi signaalipaaride vastastikuse toime olulises ebasümmeetrias, millel põhinebki süsteemi sisendsignaali (edaspidi sisend) ja väljundsignaali (edaspidi väljund) eristamine. Sisend mõjutab väljundit, viimase tagasimõju sisendile aga puudub (on reaalses süsteemis tühine). Orientatsioon on tarvilik igasuguse informatsiooni ülekandmisel. 1.3 Mis iseloomustab süsteemi sisendit? Sisend on süstee-mist sõltumatu ja peab süsteemi analüüsil olema teada. 1.4 Mis iseloomustab süsteemi väljundit? Väljund on orienteeritud süsteemi muutuja, mida m
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool TEHISNÄRVIVÕRGUD JA NENDE RAKENDUSED Õppematerjal Koostas: Eduard Petlenkov Tallinn 2004 1 Sisukord Eessõna .......................................................................................................................................2 1. Tehisnärvivõrgud ........................................................................................3 1.1. bioloogiline neuron ja bioloogilised närvivõrgud .......................................3 1.2. tehisneuron .............................................................................
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool TEHISNÄRVIVÕRGUD JA NENDE RAKENDUSED Õppematerjal Koostas: Eduard Petlenkov Tallinn 2004 1 Sisukord Eessõna .......................................................................................................................................2 1. Tehisnärvivõrgud ........................................................................................3 1.1. bioloogiline neuron ja bioloogilised närvivõrgud .......................................3 1.2. tehisneuron .............................................................................
Tallinna Tehnikaülikool Elektriajamite ja Jõuelektroonika Instituut Automaatjuhtimine Tunni tööde aruanded Õpilane Juhendajad: Tõnu Lehtla Rainer Kährik Tallinn 2008 Lineaarsete süsteemide tüüplülid Töö eesmärk: Tutvuda integreerimis-, võnke- ning aperioodilise lüliga alljärgneva kava alusel. Integreerimislüli: 1)Teoreetiline ülevaade: Integreerimislüli nimetatakse ka astaatiliseks lüliks ning I-lüliks. Ideaalne integreerimislüli väljundsignaal kasvab (või kahaneb pidevalt püsiva kiirusega, kui xs 0 ja on konstantne. Kiiruse määrab hüppe suurus sisendil. Reaalsel integreerimislüli (kirjeldatav IT1-lüliga) on väljundsignaali kasvamiskiirus alghetkel null ja tõuseb pikkamööda lõpliku kiiruseni. · Diferentsiaalvõrrand: v (t)=Ku (t) · Ülekandefunktsioon:


























Kõik kommentaarid