TALLINNA TEHNIKAÜLIKOOL
Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool
TEHISNÄRVIVÕRGUD JA NENDE RAKENDUSED Õppematerjal
Koostas: Eduard Petlenkov
Tallinn 2004 1
Sisukord
Eessõna .......................................................................................................................................2
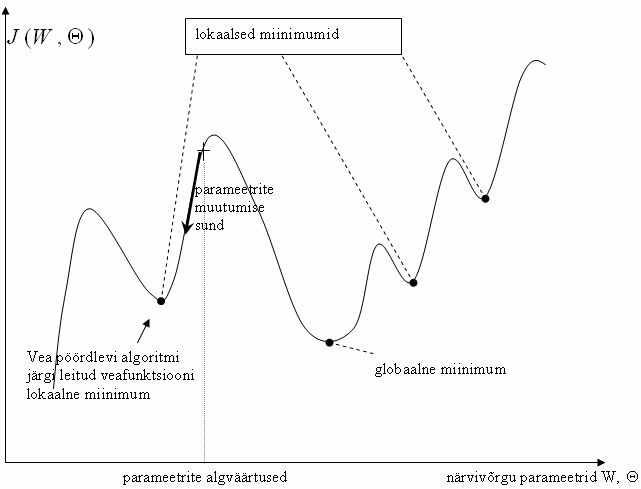
1. Tehisnärvivõrgud ........................................................................................3 1.1. bioloogiline neuron ja bioloogilised närvivõrgud .......................................3 1.2. tehisneuron ....................................................................................4 1.3. tehisnärvivõrgud ja nende arhitektuurid ..................................................................7 1.3.1. Otsesuunatud närvivõrgud ja mitmekihiline pertseptron ...................................8 1.3.2. Rekurentsed närvivõrgud .................................................................................10 1.3.3. Iseorganiseeruvad närvivõrgud ........................................................................11 1.4. Õppimine, õpiprotsessid, õpialgoritmid .................................................................12 1.4.1. Gradient vea pöördlevi meetod ........................................................................14 1.4.2. Widrow- Hoff 'i algoritm ...................................................................................15 1.4.3. Kohonen'i iseorganiseerumise algoritm ..........................................................16 1.5. Õppimise ülesanded ...............................................................................................16
2. Teoreetilised alused ............................................................................................................19 2.1. Stone -Weierstrassi teoreem ....................................................................................19 2.2. Kolmogorovi teoreem ............................................................................................22
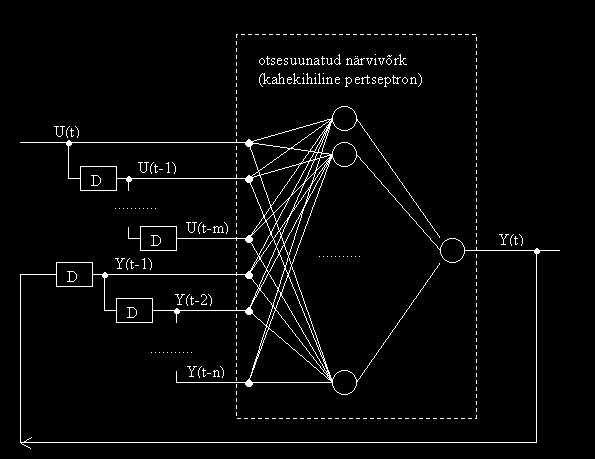
3. Mitmekihiline pertseptron ja vea tagasilevi meetod ..........................................................24
4. Modelleerimine tehisnärvivõrkudega ................................................................................28
5. Juhtimine tehisnärvivõrkudega ..........................................................................................30 5.1. Ennustamisega juhtimine .......................................................................................30 5.2. Närvivõrgu õpetamine regulaatori realiseerimiseks ...............................................31 5.3. Närvivõrkude kasutamine PID-regulaatori sünteesil .............................................31
Kirjanduse alfabeetiline loetelu ...............................................................................................33 2
Eessõna
Tallinna Tehnikaülikoolis ei õpeta spetsiaalset närvivõrkude kursust. Käesolev õppematerjal
on ettenähtud eelkõige info- ja kommunikatsioonitehnoloogia valdkonna üliõpilastele. Ta
annab ülevaate tehisnärvivõrkude koostamise printsiipidest ja nende tähtsamatest rakendustest . Erilist tähelepane pööratakse mitmekihilisele pertseptroni struktuurile ja vea
tagasilevi meetodile. Iga peatükki lõpus huvitundjatele pakutakse täiendavat kirjandust, kust
saab leida rohkem informatsiooni vaadeldava temaatika kohta. 3
1 Tehisnärvivõrgud ( artificial neural networks , )
Tänapäeval üks populaarsemaid mõisteid juhtimisteoorias on Närvivõrk. Vaatleme mis on
närvivõrk, millest võrk koosneb, kuidas seda kasutada ja missugused praktilised ülesanded
võivad olla lahendatud nende abil.
Tehisnärvivõrk on väga lihtsustatud bioloogilise närvivõrgu mudel. Tema tööalgoritmid on ka
tulnud bioloogiliste närvivõrkude tööprintsiibist.
1.1 Bioloogiline neuron ja bioloogilised närvivõrgud
Inimese aju on väga keeruline ja võimas süsteem. Ta on võimeline mõtlema, mäletama, ja lahendama probleemi. Seepärast teda tööd katsetakse simuleerida arvuti mudeli abil. Aju
koosneb omavahel seotud rakkudest neuronitest.
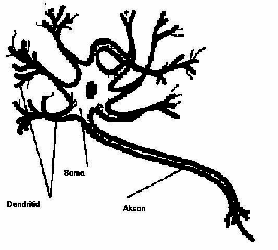
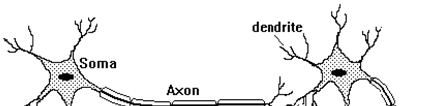
Bioloogiline neuron (joonis 1.1) on lihtne andmeid töötlev süsteem. Ta saab informatsiooni dendriitide kaudu. Dendriit -id on bioloogilise närvivõrgu sisendid . Sisendsignaalideks on närvi impulsid väga nõrgad elektrilised voolud. Neuron võtab vastu signaalid ja teisendab neid kui nad on piisava tugevusega. Akson on neuroni väljund. Ühel neuronil võib olla mitu sisendit ja ainult üks väljund. Peamised informatsiooni teisendused toimuvad neuroni kehas, mida nimetatakse soma -ks. Kõik seal toimuvad protsessid on keemilised. Need protsessid genereerivad väljund signaali, mille tugevus sõltub sisend signaalide tugevusest teatud bioloogiliste seaduste järgi. Bioloogilises neuronis eelpool mainitud seadus sõltub neuroni Joonis 1.1 Bioloogiline neuron aktiivsusest ja võib muutuda ajas.
Üksikud neuronid ühendatakse võrku sinaptiliste ühenduste abil (joonis 1.2). Signaal neuroni
väljundist antakse teiste neuronite sisenditele. Iga neuroni sisend võib olla ühendatud ühe
neuroni väljundiga ja ainus väljund teiste neuronite ühe sisendiga. Sünaps asub ühe neuroni väljundi ja teise neuroni sisendi vahel. Ta võib nii tugevdada kui ka nõrgendada elektrilise impulsi tugevuse analoogiliselt takistusele elektriskeemis. Aju töötamisel see protsess on Joonis 1.2 Bioloogiline närvivõrk üks olulisemaid ja keeruliselt realiseeritav.
Sünaptilised ühendused juhivad aju tööd, nende väärtustest sõltub inimese mälu. Näiteks. Kui
inimene sünnib siis tema ajus on umbes 100 miljardit neuronit ja iga neuron on sünaptiliste
ühenduste kaudu ühendatud umbes 1000 teiste neuronitega. Niimoodi on moodustunud 100
triljonit sünaptilist ühendust, mis juhivad aju tööd. Põhjalikumalt bioloogilistest neuronitest ja
närvivõrkudest vaata täiendavast kirjandusest. 4
Täiendav kirjandus: 1. Tsoukalas, L. H., Uhrig, R. E. Fuzzy and neural approaches in engineering . New York : Wiley-Interscience, 1996. 587 p. 2. Haykin, S. Neural Networks, Prentice-Hall international (UK) Limited, London, 1994. 696 p. 3. , . . : : « ». . , 1999. 76 .
1.2 Tehisneuron
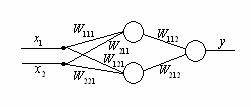
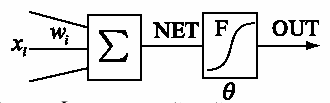
Bioloogiline neuron on väga keeruline süsteem ja tema täpset matemaatilist mudelit veel ei ole. Tehisneuron on bioloogilise neuroni lihtsustatud matemaatiline mudel. Nendest mudelitest üks võimsamaid on F.Rosenblatt´i neuroni mudel. Ta koosneb kahest osast: kaalutud summaatorist ja mittelineaarsest elemendist. Üldine tehisneuroni struktuur on toodud joonisel 1.3.
kaalutud summaator
mittelineaarne element Joonis 1.3 Tehisneuron
Igal neuronil on n sisendit x1 K x n . x1 X = M on tehisneuroni sisendite vektor . x n Iga sisend korrutatakse läbi kaalukoefitsiendiga, mida mõni kord nimetatakse sünaptiliseks kaaluks ( synaptic weight, ). Need koefitsiendid võivad olla nii positiivsed kui ka negatiivsed, analoogiliselt bioloogiliste neuronite sünaptiliste ühendustega. Nad võimaldavad nii suurendada kui ka vähendada elektrilise impulsi tugevust. W = [w1 K wn ] on tehis Joonis 1.4 Tehisneuroni elemendid neuroni kaalukoefitsientide vektor (joonis 1.4). 5
Kaalutud summatori sisendis iga sisend korrutatakse läbi vastava kaalukoefitsiendiga.
Summatori väljund NET on nende korrutiste summa. Järelikult summatori funktsiooni võib
kirjutada järgnevalt:
x1 NET = W X = [w1 K wn ] M = w1 x1 + K + wn x n . (1.1) x n
Mittelineaarse elemendi funktsiooni nimetatakse aktiveerimisfunktsiooniks (activation function , ). Kaalutud sisendsignaalide summast NET arvutab
aktiveerimisfunktsioon neuroni väljundi OUT. OUT=f(NET) (1.2)
Tavaliselt, aktiveerimisfunktsioon on pidev mittelineaarne funktsioon, aga mõnedel
rakendustel võib ka lineaarne olla. Kõige levinumad aktiveerimisfunktsioonid on sigmoid
funktsioonid.
Sigmoid funktsioonid on ülemise ja alumise raja (0 ja 1 või -1 ja 1) vahel monotoonselt
kasvavad pidevad funktsioonid. Nende funktsioonide põhiliseks eesmärgiks on hoida
neuronite väljundid mõistlikes piirides.
Sigmoid funktsioonide näited on logistiline funktsioon ja hüperboolne tangens :
1. Logistiline funktsioon (logistic function, ):
1 OUT = (1.3) 1 + e - NET
Joonis 1.5 Logistiline funktsioon
Neuroni väljund on piiratud vahemikus [0; +1].
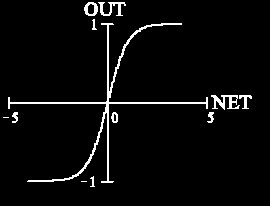
2. Hüperboolne tangens (hyperbolic tangent function, ):
e NET - e - NET OUT = (1.4) e NET + e - NET
Joonis 1.6 Hüperboolne tangens 6
Neuroni väljund on piiratud vahemikus [-1; +1].
3. Tihti kasutatakse ka lineaarset aktiveerimisfunktsiooni:
Seda funktsiooni kasutatakse, näiteks, lineaarsete süsteemide identifitseerimisel ja sellistel
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool TEHISNÄRVIVÕRGUD JA NENDE RAKENDUSED Õppematerjal Koostas: Eduard Petlenkov Tallinn 2004 1 Sisukord Eessõna ......................................................................................................................................
Algtingimused, mis väljendavad süsteemisiseseid akumulatsioone, peavad olema fikseeritud, et saada üheselt määratud lahendit. Alghetkel sisemised akumulatsioonid peavad alati puuduma (=0). Seega algtingimused väljenduvad kujul: y(0)=0; dy(0)/dt=0; d 2y(0)/dt2=0; ... ; dn-1y(0)/dtn-1=0 Tulemusena on väljundmuutuja y(t) üheselt määratud sisendmuutujaga u(t) y(t)=H(u(t)), kus H tähistab süsteemi ülekandeoperaatorit. 2.3Algolekud nullised ja mittenullised. Avage nende sisu.- Nullised algolekud- teatava sisendmuutuja rakendamisel süsteemi sisendisse hetkel t0 pole reaktsiooni väljundis üheselt määratud. Põhjuseks on süsteemi akumulatsiooni toima , mis on põhjustatud võimalikest protsessidest enne ajahteke t0. Sõltuvus ainult sisendsignaalist tekib vaid siis kui hetkel t0 süsteemisisene akumulatsioon puudub täielikult ,tegemist on sellisel juhul nullise algtingimusega
erinevad võrdse ajaintervalli võrra, mida tavaliselt nimetatakse taktiks ehk taktikestuseks (aeg mõõdetakse taktides, väärtused kindlal ajal mõõdetud, mis vahepeal toimub ei tea) ning ajahetki taktihetkedeks. Enamik tehnilisi süsteeme on diskreetsed, diskreetne signaal on arvude jada. Dünaamiliste süsteemide modelleerimine. Milliseid mudeleid kasutatakse lineaarsete statsionaarsete pidevaja süsteemide kirjeldamisel? Algolekud – nullised ja mittenullised. Avage nende sisu. Millistel tingimustel ja eeldustel on pidevaja süsteem esitatav ekvivalentse diskreetaja süsteemina? Avage probleemi olemus ja tähtsus süsteemiteooria seisukohalt. Dünaamiliste süsteemide modelleerimine: Modelleerimisel tehakse kindlaks vajalik sisendite arv ning sisendite seos väljunditega. Süsteemi matemaatilise mudeli liigid: 1.Algebralised, seovad omavahel muutujate iga ajahetke väärtusi. 2. Diferentsiaalvõrrandid, seovad muutujaid kirjeldavaid ajafunktsioone. 3
t. aeg on üheks süsteemi mudeli muutujaks. See mudel seob muutujate väärtusi erinevatel ajahetkedel või muutujate tuletisi. Mudeli eripärast tingituna tekivad teatud seaduspärasusega kulgevad ajalised protsessid süsteemis. s.t nad on ajas muutuvate olekutega. Üks olulisemaid süsteemide omadusi on avatud süsteemide dünaamika. See kirjeldab süsteemi käitumist muutuvate välistingimuste korral. Käitumine sõltub nii välistoimest kui ka süsteemi sisemistest omadustest. Nende analüüsi aluseks on tavaliselt süsteemi matemaatiline mudel, mis võimaldab selgitada ja analüüsida tekkivate siirdeprotsesside eripära, lahendades mudelisse kuuluvad võrrandid. Süsteemi mudel on idealiseeritud olem, mis teatavate lihtsustustega kajastab tegelikku süsteemi kas struktuuri, käitumise või mõlema mõningate omaduste suhtes. Süsteemi mudelit võib kirjeldada sõnaliselt, matemaatiliselt, deskriptiiv-graafiliselt, semiootiliselt, formaalkeelega, materiaalse
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool Daniel Tuulik 111618 IASM Praktikumide aruanne Aines ISS0022 Automaatjuhtimissüsteemide jätkukursus Juhendaja: Eduard Petlenkov Dotsent Tallinn 2012 Praktikum 1_1: Etalonmudeliga adaptiivsüsteemid...............................................2 Praktikum 1_2: Identifitseerimisega adaptiivsüsteemid ........................................2 Praktikum 2: Palli juhtimine rennil........................................................................3 Praktikum 3: Närvivõrkude õpetamine..................................................................3 Praktikum 4: Mittelineaarsete süsteemide juhtimine tehisnärvivõrkudega ...........4 Praktikum 5: Model Reference c
jaoks mitteeksisteerivaiks. Sageli diskreetsed ajahetked erinevad võrdse ajaintervalli võrra, mida tavaliselt nimetatakse taktiks (taktikestuseks) ning ajahetki taktihetkedeks. Diskreetaja süsteemi käitumine on määratud diskreetsetel, isoleeritud ajahetkedel, milliseid võib olla lõpmatu, kuid loenduv hulk. 2. Dünaamiliste süsteemide modelleerimine. Milliseid mudeleid kasutatakse lineaarsete statsionaarsete pidevaja süsteemide kirjeldamisel? Algolekud - nullised ja mittenullised. Avage nende sisu. Millistel tingimustel ja eeldustel on pidevaja süsteem esitatav ekvivalentse diskreetaja süsteemina? Avage probleemi olemus ja tähtsus süsteemiteooria seisukohalt. 1. Dünaamiliste süsteemide modelleerimine: dünaamiline süsteem: Enamus süsteeme on dünaamilised, see on süsteem, milles esinevad ajaliselt muutuvad protsessid(siirdeprotsessid), s.t. aeg on üheks süsteemi mudeli muutujaks. See mudel seob muutujate väärtusi erinevatel ajahetkedel või muutujate tuletisi
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Automaatikainstituut Automaatjuhtimise ja süsteemianalüüsi õppetool Daniel Tuulik 111618 IASM Eksamiülesande lahenduse aruanne Aines ISS0022 Automaatjuhtimissüsteemide jätkukursus Juhendaja: Eduard Petlenkov Dotsent Tallinn 2011 Ülesanne 1........................................................................................................................... 3 Ülesande püstitus ............................................................................................................ 3 Lahenduskäik .................................................................................................................. 3 Sisend- ja väljund katseandmete tekitamine ............................................................... 3 Närvivõrgu treenim
0.4 0.2 0 0 20 40 60 80 100 Numbrilised väärtused x (iga) Numbriline muutuja Joonis 3. Muutuja hägus tükeldus. Teised tükelduse omadused on empiirilisemalt määratletud. Reeglina on soovitatav, et hägusad hulgad, mis tükelduse moodustavad on kumerad, normaalsed, "piisavalt" eristuvad ja et nende arv on suhteliselt väike (maksimaalselt 7-10 [2]). Hägusa tükelduse semantiline adekvaatsus.ripub ära jooksva ülesande kontekstist ja kujutab endast lingvistiliste märgendite ja neile vastavate liikmesfunktsioonide kooskõla. Siinkohal on oluline märkida, et mitte alati ei kasutata ära hägusloogikasüsteemide semantilisi tõlgendusvõimalusi (s.o. lingvistilised märgendid võivad kanda minimaalset infot väljendavaid






























































Kõik kommentaarid