1. Kompleksarv kui reaalarvude paar. Tehted kompleksarvudega. Tehete omadused. Kompleksarvu algebraline kuju. Tuletatavad tehted ja nende omadused. Kompleksarvuks nimetatakse reaalarvude paari (x,y). C = {(x;y) | x, y R} Tehted kompleksarvudega: z1 = (x1; y1) C; z2 = (x2; y2) C 1. liitmine: z1 + z2 = (x1 + x2; y1 + y2) 2. korrutamine: z1 * z2 = (x1x2 - y1y2; x1y2 + x2y1) Kompleksarvudega tehete omadused 1. liitmine on kommutatiivne, st z1 + z2 = z2 + z1 z1, z2 C korral 2. liitmine on assotsiatiivne, st (z1 + z2) + z3 = z1 + (z2 + z3) z1, z2, z3 C korral 3. liitmise suhtes leidub nullelement (reaalarv 0, 0 + z = z + 0 = z z C korral), st leidub C, nii et z + = + z = z z korral; = (0; 0) = 0 4. igal kompleksarvul z = (x; y) = x + yi leidub (liitmise suhtes) vastandarv, st selline arv w C, et z + w = w + z = 0; w = -z 5. korrutamine on kommutatiivne, st z1z2 = z2z1 z1, z2 C korral 6. korrutamine on assotsiatiivne, st (z1z2)z3 = z1(z2z3) z1, z2, z3 C korral
1.Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Süsteemi maatriks ja laiendatud maatriks. Lineaarseks võrrandisüsteemiks nimetatakse lõplikust arvust lineaarseist võrrandeist koosnevat a11 x1 + a12 x 2 + ...a1n xn = b1 süsteemi. Tema üldkuju on: (3) a 21 x2 + a 22 x 2 + ...a 2 n x n = b2 Arve a ij nimetatakse võrrandisüsteemi .................... a m1 x1 + a m 2 x 2 + ...a mn x n = bm kordajateks, arve b1 , b2 ,..., bm aga süsteemi vabaliikmeteks. Arve c1 , c 2 ,..., c n , mis rahuldavad süsteemi kõiki võrrandeid, nimetatakse võrrandisüsteemi lahendiks. Lineaarse võrrandisüsteemi (3) kordajatest moodustatud maatriksit nimetatakse süsteemi (3) maatriksiks. Maatriksi A täiendamisel vabaliikmete veeruga tekkinud maatriksit nimetatakse süsteemi (3) laiendatud maatriksiks. 2. Substitutsiooni definitsio
I. Determinandid 1 Determinandi m~ oiste 1.1 Idee selgitus Algul defineerime esimest j¨ arku determinandi, siis esimest j¨arku determinandi abil teist j¨ arku determinandi, seej¨arel teist j¨arku determinandi abil kolmandat j¨ arku detereminandi jne, n-j¨arku determinandi defineerime (n - 1)-j¨arku determinandi kaudu. Sel- list defineerimisviisi nimetatakse induktiivseks ja vastavat objekti induktiivseks konstruktsiooniks. Eelnevalt on soovitatav tutvuda maatriksi m~oistega (II.1.1). Kooloniga v~ordus A := B t¨ahendab j¨argnevas, et A on defineeri- tud B kaudu. Seda v~ordust kasutame ka samav¨ a¨arsete t¨ ahistuste sissetoomiseks. 1.2 Esimest j¨ arku determinant Arvu a R determinandi |a| ehk esimest j¨ arku determinandi de- fineerime valemiga |a| := det a := a. 1.3 N¨ aide | - 5| = -5
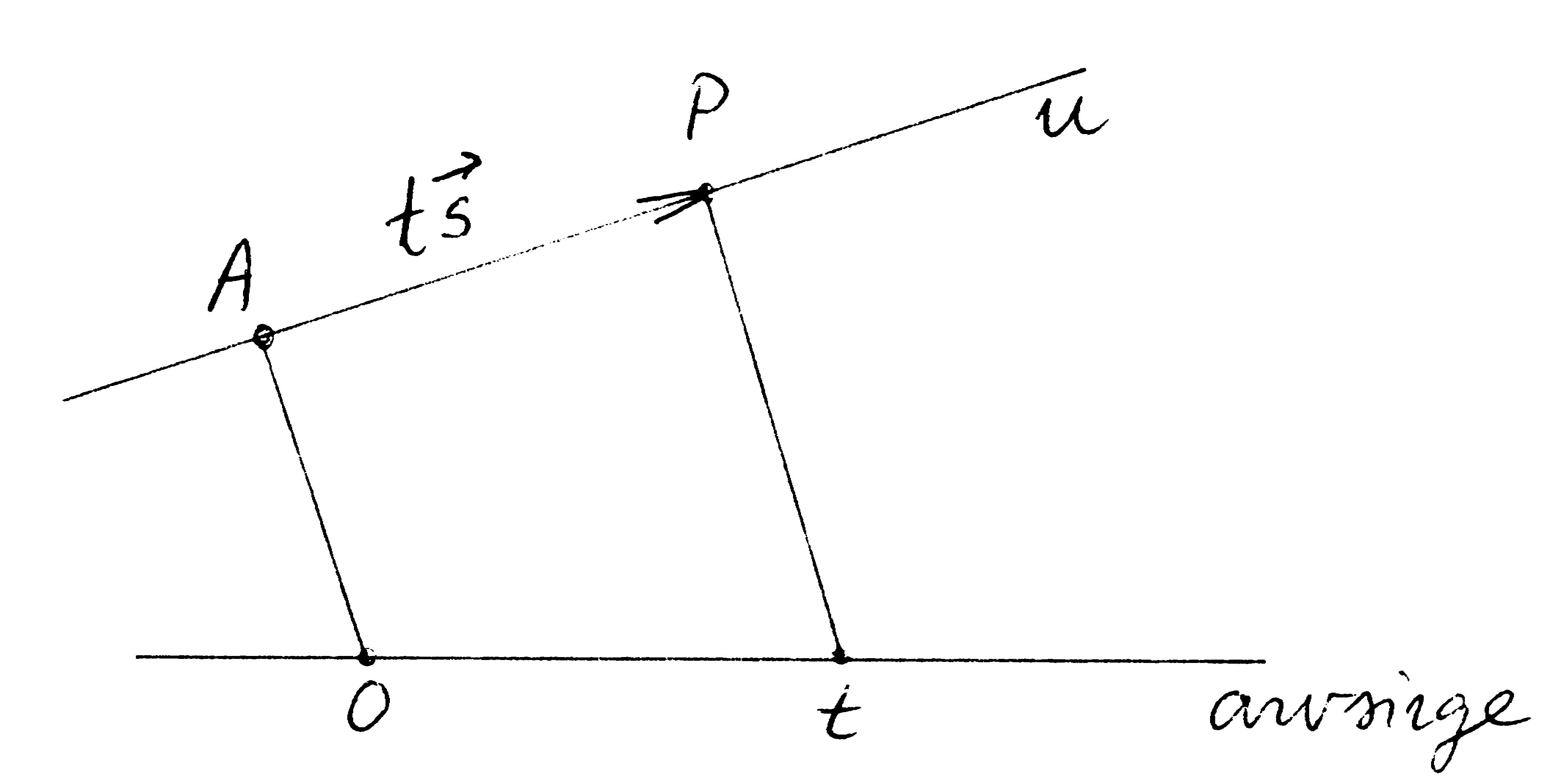
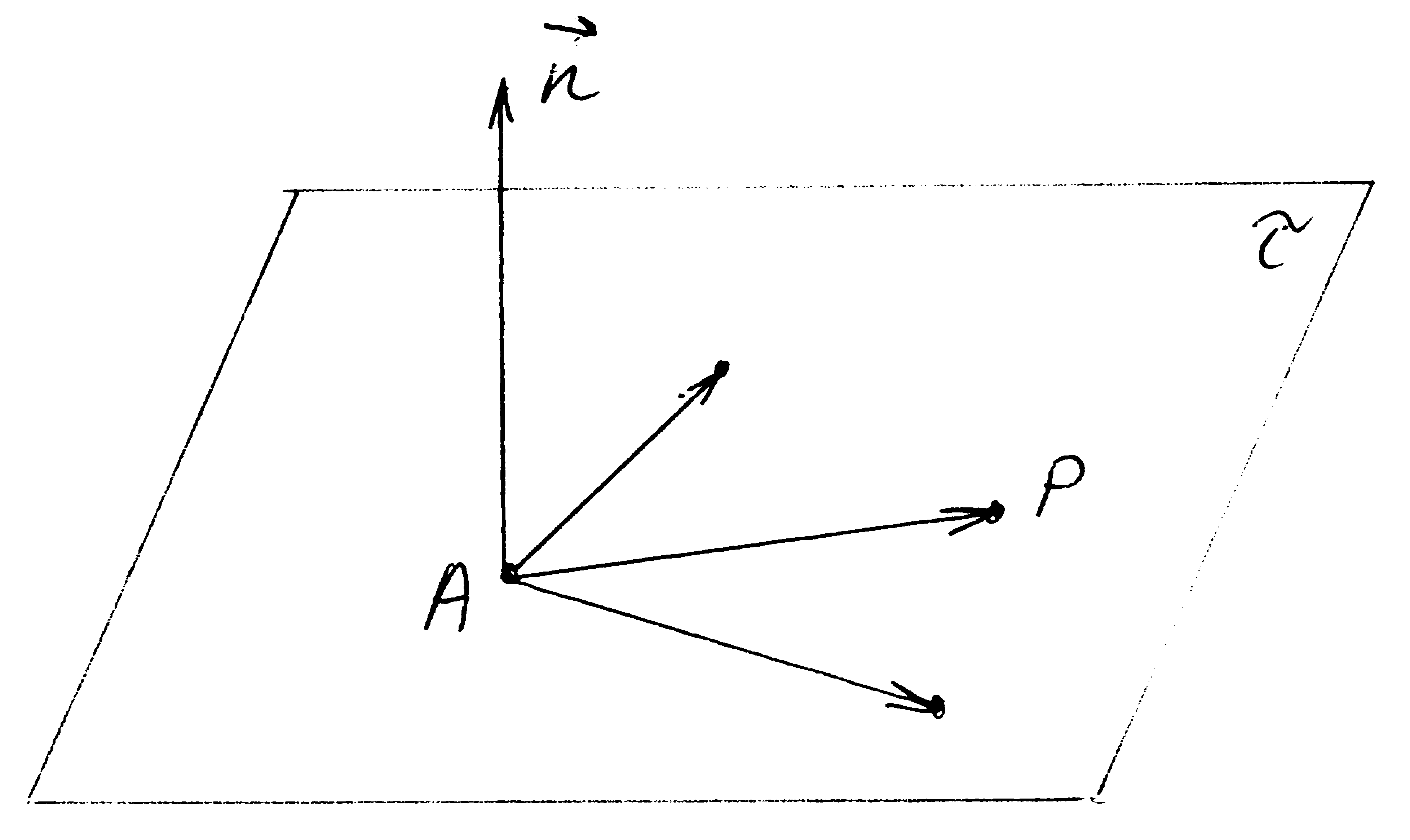
1 VEKTORALGEBRA PÕHIMÕISTEID DEFINITSIOON. Suurusi, mis on iseloomustatud oma 1) arvväärtuse (pikkuse), 2) sihi ja 3) suunaga, nimetatakse vektoriteks. Tähistame neid a, b,... . MÄRKUS. Geomeetriliselt on vektor a määratud kahe punktiga oma alguspunktiga A ja lõpp-punktiga B. Tähistame a = AB, kusjuures: 1) arvväärtuse määrab punktide vaheline kaugus, 2) sihi määrab punktidega antud sirge s(A,B), 3) suund on määratud punktide järjestusega. OLULISED VEKTORID: Vektoreid, mille arvväärtus (pikkus) on üks, nimetatakse ühikvektori- = 1. teks. Kasutatakse tähistust e, st e Vektoreid, mille arvväärtus (pikkus) on null, nimetatakse nullvektoriteks. Kasutatakse tähistust 0. Nullvektori siht ja suund on määramata. VEKTORITE VASTASTIKUSED SEOSED: Vektorid a ja b on võrdsed (a
1 VEKTORALGEBRA PÕHIMÕISTEID DEFINITSIOON. Suurusi, mis on iseloomustatud oma 1) arvväärtuse (pikkuse), 2) sihi ja 3) suunaga, nimetatakse vektoriteks. Tähistame neid a, b,... . MÄRKUS. Geomeetriliselt on vektor a määratud kahe punktiga oma alguspunktiga A ja lõpp-punktiga B. Tähistame a = AB, kusjuures: 1) arvväärtuse määrab punktide vaheline kaugus, 2) sihi määrab punktidega antud sirge s(A,B), 3) suund on määratud punktide järjestusega. OLULISED VEKTORID: Vektoreid, mille arvväärtus (pikkus) on üks, nimetatakse ühikvektori- = 1. teks. Kasutatakse tähistust e, st e Vektoreid, mille arvväärtus (pikkus) on null, nimetatakse nullvektoriteks. Kasutatakse tähistust 0. Nullvektori siht ja suund on määramata. VEKTORITE VASTASTIKUSED SEOSED: Vektorid a ja b on võrdsed (a
¨ TARTU ULIKOOL MATEMAATIKA-INFORMAATIKA TEADUSKOND Puhta matemaatika instituut Aivo Parring ALGEBRA JA GEOMEETRIA Tartu 2005 SISSEJUHATUS K¨aesolevate m¨arkmete j¨arele tekkis vajadus 2000/01 ~oppeaastal, kui muudeti tollase matemaatikateaduskonna ~oppekavasid. Selle tulemusena l¨ ulitati ~oppekavasse algebra ja anal¨ uu¨tilise geomeetria sissejuhatavaid pea- t¨ukke k¨asitlev aine "Algebra ja geomeetria". Vahepeal on elu edasi l¨ainud. Matemaatikateaduskonnast on juba saanud matemaatika-informaatikatea- duskond. Nelja-aastasest bakalaureuse ~oppest on saamas kolmeaastane bakalaureuse ~ope. Uue ~oppekava kohaselt on selle ~oppeaine maht n¨ uu ¨d 40 tundi loenguid ja sama palju harjutusi. Iseseisvaks t¨o¨ oks on ette n¨ahtud 80 tundi. Semestri jooksul toimub 20 kahetunnilist loengu
Kõrgema matemaatika kordamisküsimused 1. Maatriksi definitsioon. Maatriksi elemendid. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Transponeeritud maatriks 2. Maatriksite korrutise definitsioon. Korrutamise omadused ja seosed lineaarsete tehete ning korrutamise vahel. Ühikmaatriks. 3. Teist ja kolmandat järku determinandid. 4. Permutatsiooni definitsioon. Inversiooni definitsioon. n-järku determinandi definitsioon. Determinandi põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide teooria põhivalem. 6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv, kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud maatriks. 8. Süsteemi lahen
1. Kompleks arvude põhimõiste,põhilised definatsioonid. K.arvude liitmine,korrutamine,jagamine algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b- imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k-arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= (a1+b1i)*(a2+b2), 2. K.geomeetriline kujutamine, trigonomeetriline kuju.korrutamine ja jagamine trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y-telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy trigonomeetriline kuju tähistame nurk X-teljel ja vektori pikkus r ,siis a=rcos ja b=rcos.avaldist z=r(cos+isin) ongi trigonomeetriline kuju. Arvutamine z1*z2=

































Kõik kommentaarid