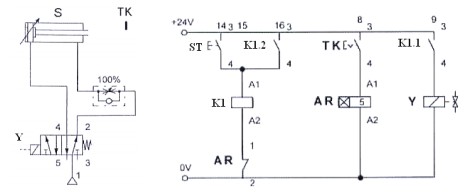
LELOL Praktiline töö EP2 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1.Tööülesanne Vastata antud küsimustele. EP2.H1 Küsimused: 1. Mida oleks tarvis muuta, et seade jääks pidevalt töötama kuni peatamiskäsuni? Vastused: 1. Pannes nupplüliti ST asemele fikseeritav lüliti. Sele EP2-1 EP2.H2 Küsimused: 1
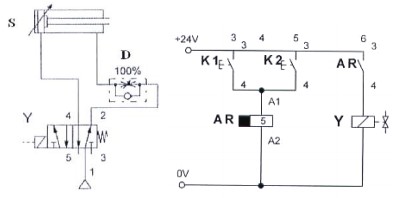
LELOL Praktiline töö PN5 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1. Tööülesanne Vastata antud küsimustele. PN5.H1 Küsimused: 1. Kui lüliti S on mõjutatud, seade ei käivitu. Miks? 2. Reguleerida aegrelee abil kolvi seisuaega plussasendis. Hinnata seisuaja reguleerimist täpsuse ja ülevaatlikkuse seisukohalt. Milline on kommentaar? 3
LELOL Praktiline töö eP1 praktILINE TÖÖ Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 1. Tööülesanne. Vastata antud küsimustele. EP1.H1 Küsimused: 1. Milles seisneb loogilise tehte NING sisu? 2. Mis juhtub, kui seadme juhtimisel jääb üks või kaks lülitit mõjutamata? 3. Kirjeldada lülitusnupu põhimõttelist ehitust. 4
4. AJAMITE JÕUAHELATE LÜLITUSED Kuidas ühendatakse elektrimootori mähised toiteallikaga? Lülitid, releed ja kontaktorid, programmeeritavad kontrollerid Kuidas toimub mootorite kiiruse reguleerimine? Impulss- või takistusreguleerimine? Pooljuhtmuundurite skeemid 4.1. Mootorite lihtsad käivitus- ja kaitseahelad Asünkroonmootori otselülitus toitevõrku. Suurt osa asünkroonmootoritest lülitatakse otse toitevõrku. Lülitusseadmeks võivad olla kas koormus või kaitselülitid. Sagedaste lülituste korral on lülitusseadmeks tavaliselt surunupplülititega juhitav kontaktor. Sõltuvalt vajadusest võib mootor pöörelda kas ühes suunas, või tuleb selle pöörlemissuunda muuta. Ühesuunalise pöörlemisega mootori otselülitus toitevõrku on näidatud joonisel 4.1. Mootori ja juhtnuppude toiteahelad pingestatakse lülitiga Q, milleks tavaliselt on kaitselüliti. Mootori käivitamine toimub vajutamisega surunupplülitile SK, mis sulgeb kontaktori lülitusmagneti mähise K voolua
käsijuhtimisaparaatide abil; automatiseeritud elektriajam inimese osavõtt juhtimises piirdub alg- juhtimiskäskluse andmisega, edaspidised juhtimistoimingud teevad mitme- sugused elektromehaanilised või muud elektriaparaadid (releed, kontaktorid, kontaktivabad loogikaelemendid, pooljuhtlülitid jne); automaatelektriajam kõik juhtimistoimingud teevad automaatjuhtimis- aparaadid, inimese osavõtt piirdub elektriajami töö jälgimisega. Elektriajami juhtimiseks kasutatavate signaalide arvu järgi liigitatakse tema juhtimissüsteemid järgnevalt: avatud juhtimissüsteemid juhtimiseks kasutatakse ainult üht juhtimissignaali, mistõttu juhtimistoime ei sõltu juhtimistulemusest puudub igasugune kontroll juhitava suuruse (kiirus, moment, võimsus vm) üle; suletud juhtimissüsteemid (joonis S1) juhtimissignaali moodustamiseks
Rakenduselektroonika Sisukord Sisukord ....................................................................................................................... 1 1. Võimendid ................................................................................................................ 3 1.1. Võimendite liigid ja neid iseloomustava
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta
Determineeritud (tavalised) süsteemid inimese poolt antakse kogu vajalik info juhitava objekti kohta, inimene häälestab ja kui tekib objekti parameetrite muutumine, siis peab inimene süsteemi ümber häälestama. Süsteem ise ei ole võimeline oma struktuuri muutma. Need süsteemid pole eriti kallid, on töökindlad, kasutatakse paljude tootmisprotsesside juhtimiseks. Nad võivad olla: a) lahtise kontuuriga need süsteemid ei ole võimelised kontrollima oma töö tulemusi ja need funktsioonid täidab inimene. b) Automaatreguleerimissüsteemid. Nendes süsteemides on olemas tagasiside mille kaudu süsteem kontrollib oma tegevust ja kui on vaja, siis korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud siis avab või sulgeb klapi ja taastab etteantud temperatuuri. Adaptiivsed süsteemid (küberneetilised) Nendele süsteemidele ei ole vaja ette anda kogu infot objekti kohta



















Kõik kommentaarid