PNEUMAATIKA ALUSED Koostas: Rein Uulma Sisukord 1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2 1.1 Suruõhu kasutamise ajalugu............................................................................................. 2 1.2 Suruõhu omadused ........................................................................................................... 2 1.3 Füüsikalised alused .......................................................................................................... 3 1.4 Õhu kokkusurutavus......................................................................................................... 6 1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7 2 Suruõhu saamine ................................................................................................................
PNEUMAATIKA ALUSED Koostas: Rein Uulma Sisukord 1 Pneumaatika ajalugu ja kasutatavad ühikud............................................................................ 2 1.1 Suruõhu kasutamise ajalugu............................................................................................. 2 1.2 Suruõhu omadused ........................................................................................................... 2 1.3 Füüsikalised alused .......................................................................................................... 3 1.4 Õhu kokkusurutavus......................................................................................................... 6 1.5 Õhu ruumala sõltuvus temperatuurist .............................................................................. 7 2 Suruõhu saamine ................................................................................................................
PNEUMOAUTOMAATIKA Eksamiküsimused 1. Pneumoautomaatika kasutusealad kasutatakse pneumo pihusteid,pressid, suruhaamreid, pidureid, pneumovõrgud, erinevat sorti pumbad,mootorid, pneuo post, pneumo püstolid. 2. Pneumoautomaatika süsteemide eelised, puudused Plussid Miinused Kättesaadavus: Õhku leidub maakeral igal Õhu ettevalmistus: pool, seega on suruõhu saamine võimalik Kasutatav suruõhk peab olema puhas ja kuiv. kõikjal. Vastasel korral põhjustab ta suruõhuseadmete kulumist ja rikkeid. See eeldab heade suruõhu ettevalmistusseadmete (filtrid, kuivatid, jne) kasutamist. Transporditavus: Õhu kokkusurutavus: Suruõhku sa
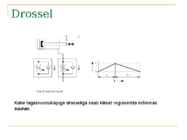
Ainehulk Mol Valgustihedus Cd Jõud N newton Kg*m/s2 Rõhk Pa pascal N/m2 Energia, töö J dzaul N*m Võimsus W vatt J/s Elektriline potensiaal/pinge V volt W/A 2. Pneumaatika eelised Kättesaadavus Transporditavus (suured kaugused) Akumuleerimise võimalus (kokkusurutav) Ajamite konstruktsiooni ja hoolduse lihtsus Pneumoenergiat on lihtne muundada nii lineaar- kui pöördliikumiseks Kõrged töökiirused Reguleeritavus Tundetus välistingimuste mõjule (rasked tingimused- tolm, temperatuur, niiskus) Seadmete töökindlus ja pikk tööiga Tule- ja plahvatusohutus Ökoloogiline puhtus Suhteliselt tundetu ülekoormusele 3. Pneumaatika puudused (nt
1. Hüdroajami mõiste. Tema kasutamist soosivad ja piiravad asjaolud. Hüdroajamiks nimetatakse sellist ajamit, milles energia kandjaks on vedelik. Hüdroajami väljundis muudetakse vedeliku hüdrauliline energia, mida iseloomustavad vedeliku rõhk ja vooluhulk, mehaaniliseks energiaks, mida kasutatakse seadme töös vajalike jõudude ja liikumiste saamiseks. Soosivad asjaolud: · Võimalus saada suuri jõude ja jõumomente suhteliselt väikeste komponentide abil. · Lihtne on saada nii kulgevat kui ka pöörlevat liikumist. · Liikumiste täpne positsioneerimine. · Võime startida suurtel koormustel. · Lihtne vältida ülekoormust. · Ühtlane liikumine ja sujuv reverseerimine. · Seadme juhtimine on lihtne. · Väldib koormuse kontrollimatu liikumise, kuna vedelik on praktiliselt kokkusurumatu ja vedeliku tagasivoolu sa
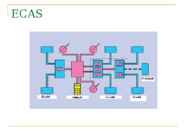
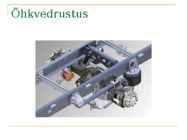
Sele 5. Piduriseadmete paiknemine veokil (allikas: Knorr) EBS elektritoide põhineb kahel eraldi ühendusel klemmiga 30(30a ja 30b; pidev toitepinge). Mõlemad vooluringid on eraldi kaitstud ja neid ei tohi kasutada muude tarbijate toiteks. EBS lülitatakse elektriliselt sisse süütelüliti (klemm 15) või EBS juhtseadme pidurilüliti (klemm 30) abil. Esirataste pöörlemissageduse ja kulumise andurid on ühenduses EBS juhtplokiga ning tagarataste vastavad andurid tagasilla rõhureguleerimismooduliga. Andmevahetus EBS juhtploki ja tagasilla mooduli vahel toimub erilise CAN andmesiini "Pidur" kaudu. Väljalülitatud aku (mehaaniline või elektrooniline aku pealüliti) korral ei saa EBSi sisse lülitada. Siis on kasutada ainult liiasussüsteem. · Andmevahetus sõiduki teiste osadega (mootori ja käigukasti juhtimine, retarder) toimub CAN andmesiini "Ajamiahel" kaudu. ·
1.Hüdroajami mõiste. Tema kasutamist piiravad asjaolud. Hüdroajamis toimub energia ülekandmine vedeliku abil ja ajami lõpplülis vedeliku hüdraulilise energia muutmine mehaaniliseks energiaks, mida kasutatakse seadmes kasuliku töö tegemiseks. Hüdroajami puudustena tuleb nimetada: tuleohtlikus töövedeliku või tema aurude lekkimisel, töövedeliku tundlikus saastumise suhtes, temperatuuri ja rõhu mõju töövedeliku viskoossusele, suhteliselt madal kasutegur. 2. Hüdroajami kasutamist soosivad asjaolud. Hüdroajami kasutamist soosib : on lihtne saada nii kulgevat kui pöörlevat liikumist, võib saada suuri jõude ja jõumomente suhteliselt väikeste ja kergete komponentide abil; jõu, jõumomendi ja liikumiskiiruse reguleerimine on lihtne ja realiseeritav odavate vahenditega, ajami ülekoormusi saab vältida, lihtne on rakendada ajami elektrilist juhtimist, mis võimaldab ajami laialdast kasutamist automaatjuhtimise korral, ühtlane liikumine ja täpne positsioneerimine, v�
AUTOMATISEERIMIS TEHNIKA VAHEEKSAMI KORDAMISKÜSIMUSED MES0040 1. Suhtelised ja absoluutsed koordinaadid APJ pingi programmeerimisel, nende tähistamine juhtprogrammides. Tooge näide ja joonistage skeem. AJP süsteemides on kasutusel ristkoordinaadistik, kus on koordinaatide tähised määratud vastavalt ISO nõudmistele. Liikumisi telgede suunas absoluutsetes koordinaatides tähistatakse tähtedega X, Y, Z ja suhtelistes koordninaatides U,V,W ning pöördeid ümber telgede vastavalt A, B, C. X- koordinaat paikneb alati horisontaalselt, Z koordinaat langeb kokku instrumendi teljega, treipingi puhul spindli teljega. AJP pinkide programmeerimisel kasutatakse koordinaatide etteandmiseks kaht varianti. Esimesel juhul antakse järgmise punkti koordinaadi väärtus mõõdetuna eelmisest punktist, tegemist on suhteliste koordinaatidega (kasutatakse ka terminit programmeerimine juurdekasvudena). Teisel juhul toimub koordinaatide väärtuste määraminne









































Kõik kommentaarid