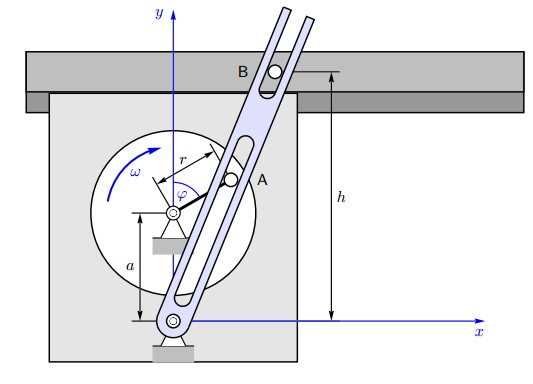
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 26. märts 2012 Õppejõud: Merle Randrüüt Leo Teder Antud andmed: B r = 500 mm a = 700 mm h =1600 mm = 60 min-1 1) Määrata vedava lüli punkti A kordinaadid funktsioonina nurgast .
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHD0030 MASINAMEHAANIKA KODUTÖÖ NR. 2 Väntmehhanismi kinemaatiline analüüs ÜLIÕPILANE: KOOD: Töö esitatud: 18.03.2014 Arvestatud: Parandada: TALLINN 2015 Lähteandmed Mehhanismi vänt OA pöörleb konstantse nurkkiirusega OA 2,4 rad/s. Pikkused: OA 40 cm, AB 110 cm, AC = 45 cm (punkt C – kepsu massikese). Leida:
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 15. mai 2012 Õppejõud: Merle Randrüüt Leo Teder Ülesanne 1 r = 250 mm l = 900 mm xB = 400 mm yB = 300 mm a) Määrata punkti A koordinaadid xA , yA funktsioonina pöördenurgast . xA = r * cos yA = r * sin b) Määrata punkti C koordinaadid xC , yC
Loengukonspekt õppeaines MASINAMEHAANIKA Koostanud prof. T.Pappel Mehhatroonikainstituut Tallinn 2006 2 SISUKORD SISSEJUHATUS 1. ptk. MEHHANISMIDE STRUKTUURITEOORIA 1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid
Tallinn 2010 R L x S S=2 R Kolbpumpade ehitus Tallinn 23 1 MATHPUMBAD. Tööorgani ehituse ja liikumisviisi poolest jagunevad mahtpumbad kahte pearühma : - edasi-tagasi liikuva tööorganiga kolb-,varbkolb- e.plunzer- , membraan-, tiib-, jt. pumbad ning - pöörleva tööorganiga rootorpumbad (hammasratas-, kruvi-, tiivik- , jt.) 2 Kolbpumbad. Kolbpumbad moodustavad mahtpumpade suurima ja vanima grupi. Esimesed teadaölevad kolbpumbad valmistati juba ligi 200 aastat enne Kr. Kolbpumpade liigitus. 1. Tootlikkuse järgi: - väikese tootlikkusega ( kuni 20 m3/h ), - keskmise tootlikkusega (20 kuni 60 m3/h ), - suure tootlikkusega ( üle 60 m3/h ). 2. Rõhu järgi: - madalrõhu pumbad ( kuni 50 mH2O) , - keskrõhupumbad (50 kuni 500 mH2O), - kõrgrõhupumbad (üle 500 mH2O). 3
1. Geodeesia mõiste ja tegevusvaldkond, seosed teiste erialadega Geodeesia teadus Maa ning selle pinna osade kuju ja suuruse määramisest, seejuures kasutatavatest mõõtmismeetoditest, mõõtmistulemuste matemaatilisest töötlemisest ning maapinna osade mõõtkavalisest kujutamisest digitaalselt või paberkandjal kaartide, plaanide ja profiilidena. Geodeesia on rakendusteadus, mis on tihedas seoses astronoomia, füüsika, geofüüsika, matemaatika, kartograafia, geomorfoloogia, geograafia ja arvutustehnikaga. Rakendusteadusena on geodeesia tähtis ehitustehnikas, mäeasjanduses, põllumajanduses, metsanduses, sõjandusess ja mujal. Geodeetilised mõõtmised ja topograafilised kaardid on vajalikud nimetatud aladel mitmesuguste projektide koostamiseks ja realiseerimiseks. 2. Maa kuju ja selle ligikaudsed mõõtmed Täpsemini vastab Maa tõelisele kujule geoid (geoid on kujuteldav keha, mille pind on kõikjal risti loodjoontega ning ühtib merede
Tallinna Polütehnikum Energeetika õppesuund Rein Kask ELEKTRIAJAMITE JUHTIMINE Õppevahend TPT energeetika õppesuuna õpilastele Tallinn, 2007 Saateks Erialaainete õpikute ja muude õppevahendite krooniline puudus on juba palju aastaid raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik siit ka õppe-
Eksamiabimees 1.Geodeetiline otseülesanne. Geodeetiliseks otseülesandeks on ülesanne, kus on antud punkti A koordinaadid (xA, yA), kaldenurk punktilt A punkti B (AB) ning kahe punkti vaheline kaugus dAB. Antud: xA, yA, AB, dAB X yAB B Leida: xB, yB ? XB xB =xA+ xAB AB yB =yA+ yAB x,y- koordinaatide juurdekasvud, "+" vôi "-". dAB xAB Tuleb arvestada millise veerandi nurgaga on tegemist. XA A xAB = dAB *cosAB yAB = dAB *sinAB xB =xAB + xA 0 YA YB Y yB =yAB + yA 2.Geodeetiline vastuülesanne. Antud on 2 punkti koordinaadid (xA,yA,xB,yB) IV veerand I veerand ja leida tuleb nurk (AB) ja punktidevaheline kaugus dAB. x + x + Antud: xA, yA, xB, yB y - y + (0...90) Leida: AB, d






















Kõik kommentaarid