INSENERIMEHAANIKA
PÕHIVARA
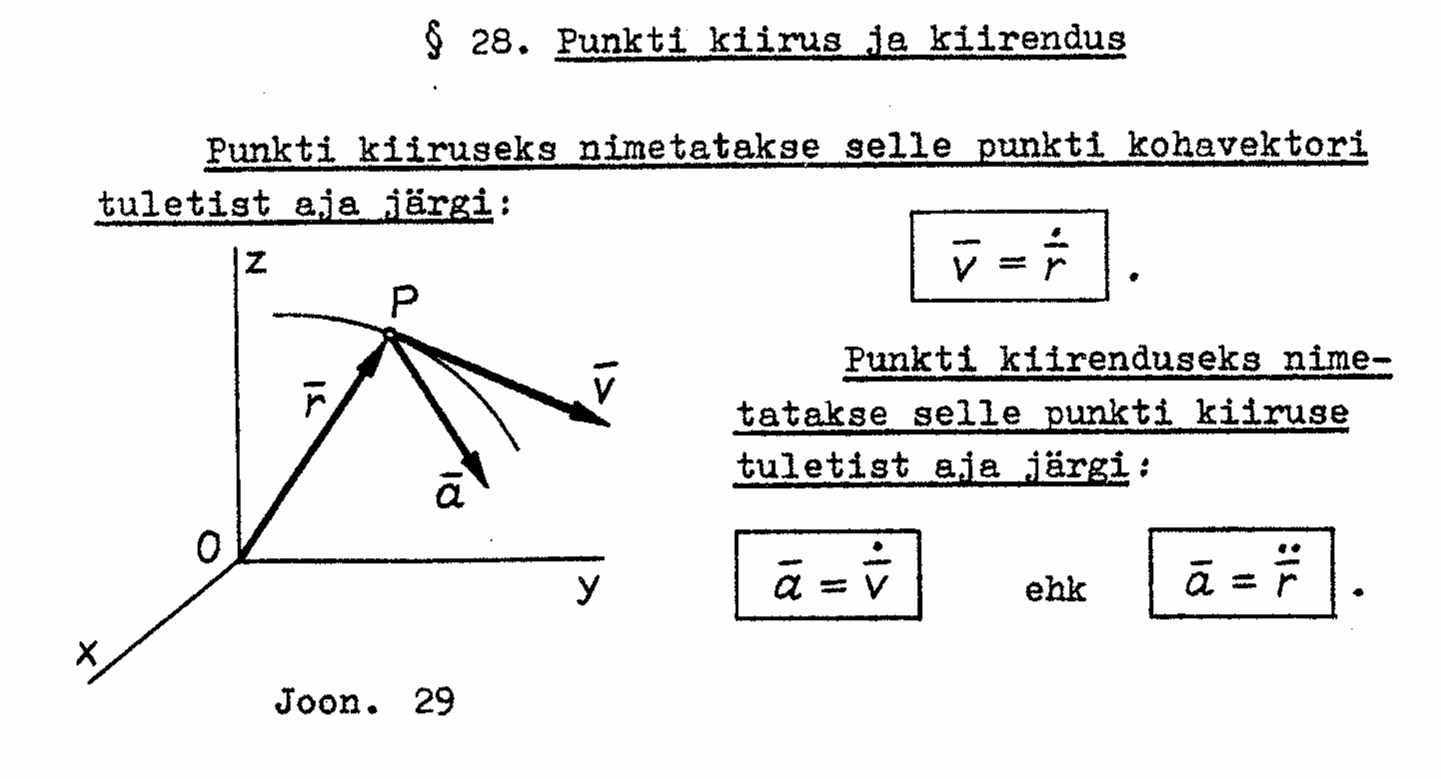
Kinemaatika
Endel Topnik
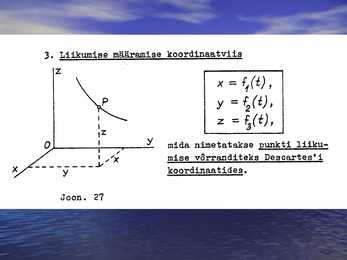
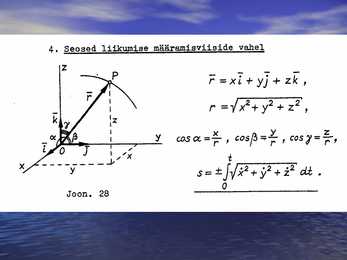
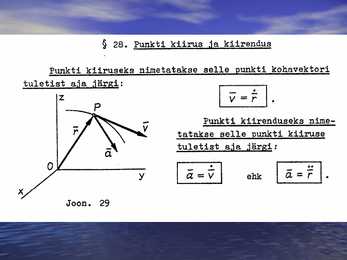
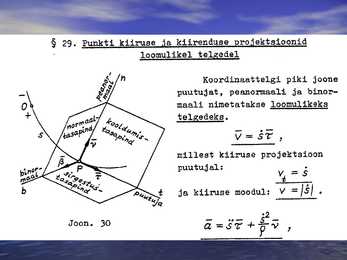
LOENGUKURSUS UTT0080 INSENERIMEHAANIKA UTT0090 INSENERIFÜÜSIKA 6. LOENG KEHADE SÜSTEEMI TASAKAAL. HÕÕRE. KINEMAATIKA 6.3 JÕUSÜSTEEMI TASAKAAL Varem oleme näidanud, et jõusüsteem on ekvivalentne tema peavektoriga ja peamomendiga. Süsteemi tasakaaluks on tarvilik ja piisav, et need võrduksid nulliga: FO = 0; MO =0. Toodud avaldised esitavad süsteemi tasakaalutingimusi vektorkujul. TASAKAALUTINGIMUSED Descartes’i koordinaatides omavad nii peavektor kui ka peamoment kolm komponenti, mis annab kokku kuus tasakaalutingimust. Skalaarkujul tasakaalutingimused
1. Teoreetilise mehaanika aine. Teoreetilise mehaanika osad (staatika, kinemaatika, dünaamika, analüütiline mehaanika). Insenerimehaanika. *Mehaanika on teadus reaalsete objektide liikumisest. * Teoreetiline mehaanika on mehaanika osa, mis uurib absoluutselt jäikade kehade paigalseisu ja liikumist nendele kehale rakendatud jõudude mõjul. Absoluutselt jäigaks kehaks nimetame keha, mille kahe mistahes punkti vaheline kaugus on jääv sõltumatult kehale toimivatest välismõjutustest (jõududest). *Seega: absoluutselt jäigas kehas ei toimu iialgi mitte
INSENERIFÜÜSIKA/INSENERIMEHAANIKA TEOREETILISE OSA KORDAMISKÜSIMUSED TEEMA 1. STAATIKA PÕHIMÕISTED. JÕUD. JÕU PROJEKTSIOON, JÕUDUDE LIITMINE. SIDEMED JA SIDEMETE REAKTSIOONID 1. Defineeri jõud ja jõu mõõtühik- Suurust, mis on kehade vastastikuse mõju mõõduks, nimetatakse jõuks. Jõud on vektor, mida tähistame F.Jõu mõõtühik on njuuton (N). 2. Defineeri koonduv jõusüsteem- koonduvasse jõusüsteemi kuuluvate jõudude mõjusirged lõikuvad ühes ja samas punktis. paralleeljõudude süsteem- paralleeljõudude süsteemi kuuluvate jõudude mõjusirged on paralleelsed. üldine jõusüsteem- jõusüsteemi, mis pole ei koonduv jõusüsteem ega paralleeljõudude süsteem, nimetatakse üldiseks jõusüsteemiks tasapinnaline jõusüsteem- tasapinnalisse jõusüsteemi kuuluvate jõudude mõjusirged asuvad ühel ja samal tasandil ruumiline jõusüsteem- ruumilisse jõusüsteemi kuuluvate jõudude mõjus
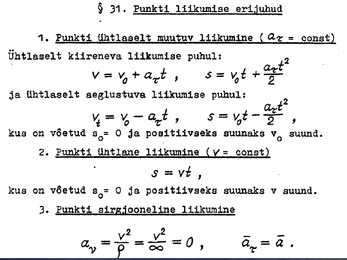
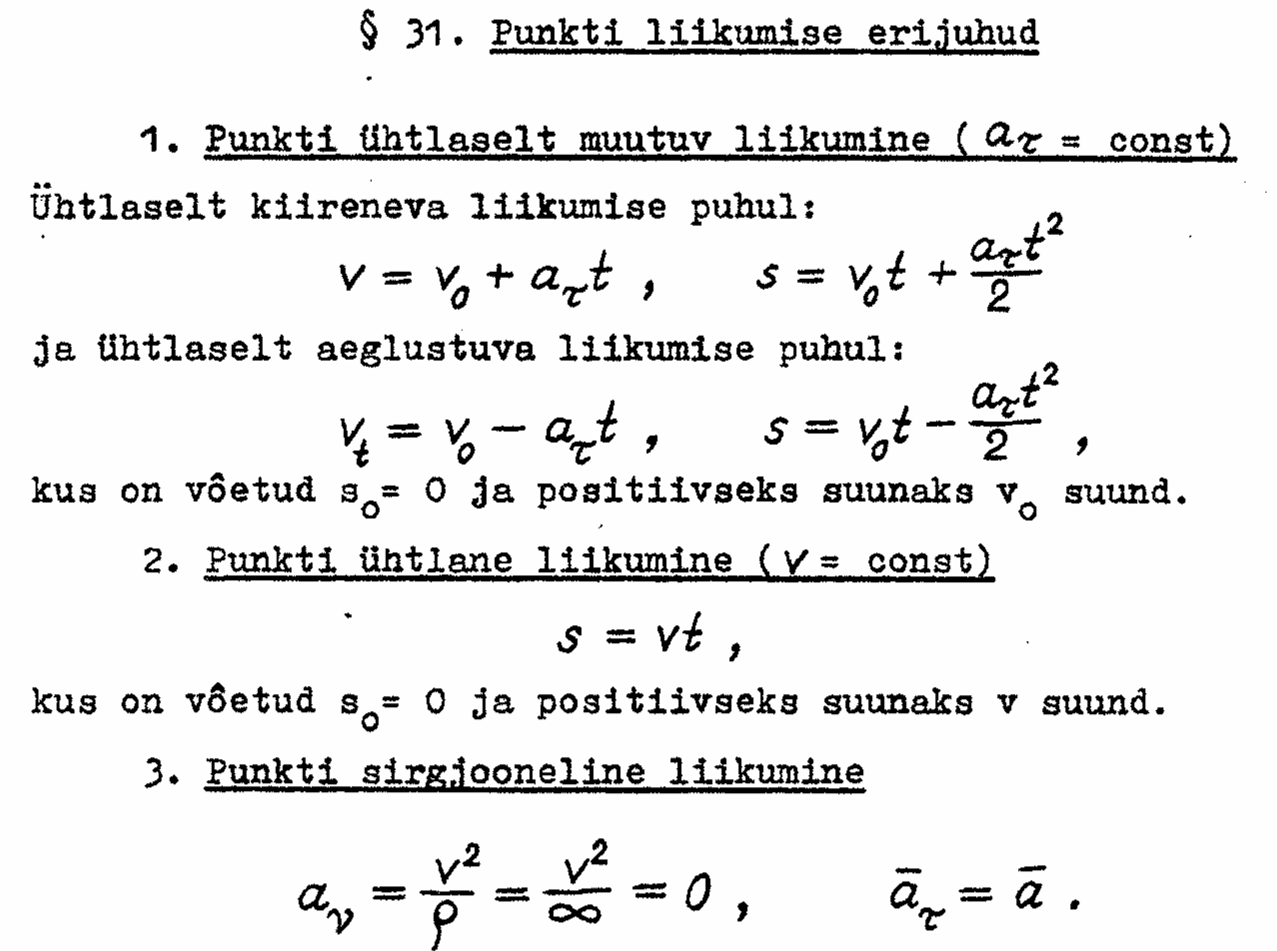
Valem Kirjeldus Teema s Kiirus ühtlasel sirgjoonelisel Kinemaatika v= t liikumisel v - v0 Kiirendus Kinemaatika a= t v = v 0 + at Hetkkiirus ühtlaselt muutuval Kinemaatika sirgjoonelisel liikumisel at 2 Teepikkus ühtlaselt muutuval Kinemaatika s = v0 t + sirgjoonelisel liikumisel 2 v 2 - v0 2 Nihe ühtlaselt muutuval Kinemaatika s= sirgjoonelisel liikumisel 2a
VALEM KIRJELDUS TEEMA s Kiirus ühtlasel sirgjoonelisel Kinemaatika v =¿ t liikumisel v−v 0 Kiirendus Kinemaatika a= t v =v 0 +at ❑❑❑ Hetkkiirus ühtlaselt muutuval Kinemaatika sirgjoonelisel liikumisel s=v 0 t +¿ at❑2 Teepikkus ühtlaselt muutuval Kinemaatika 2 sirgjoonelisel liikumisel v ❑2−v 20 Nihe ühtlaselt muutuval Kinemaatika s=¿ sirgjoonelisel liikumisel 2a 2
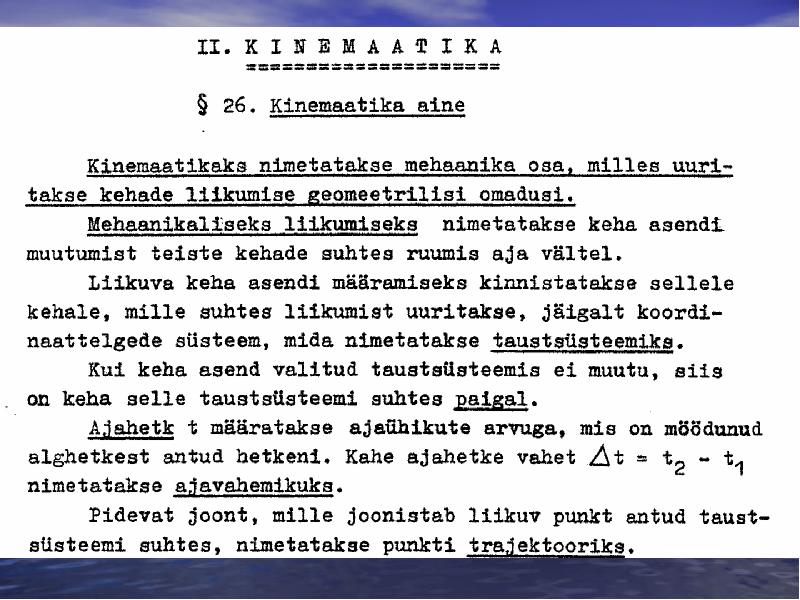
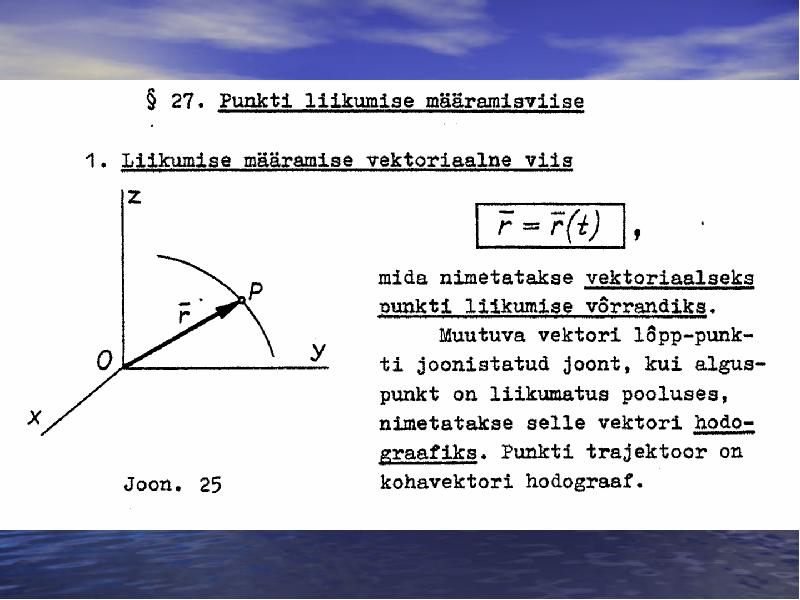
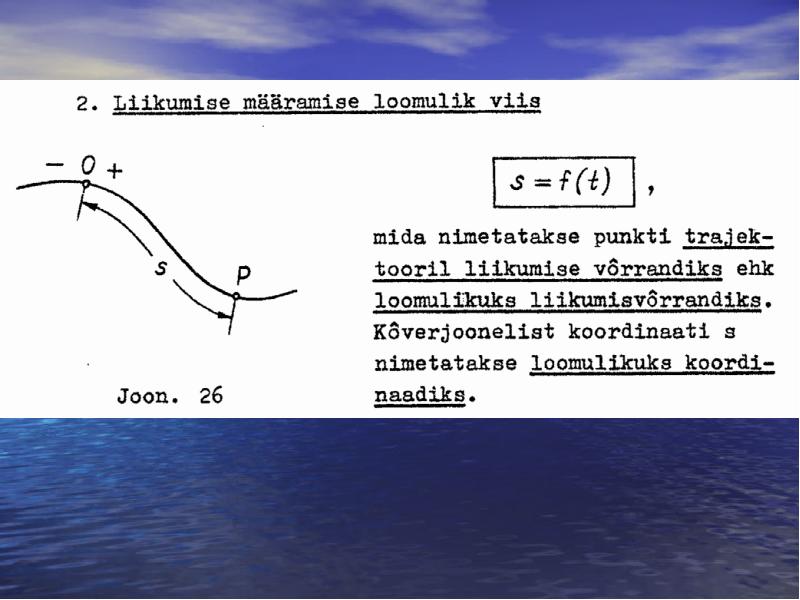
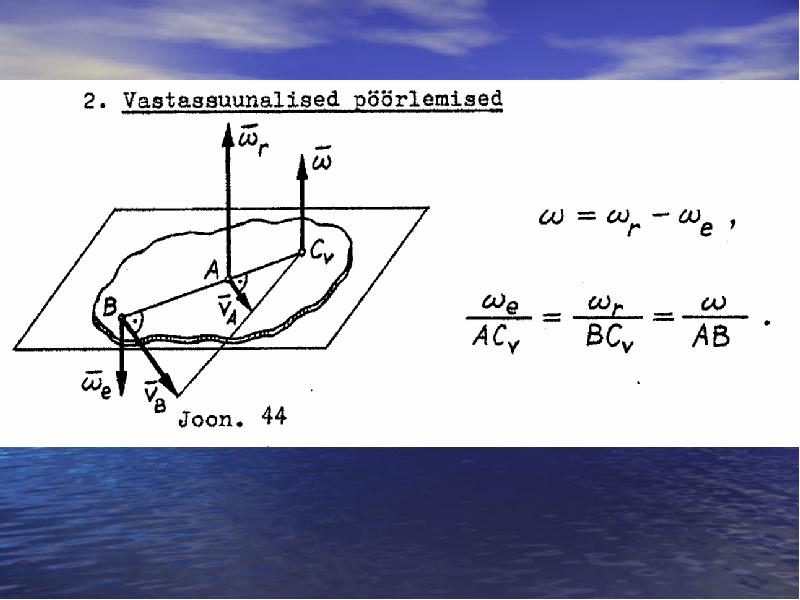
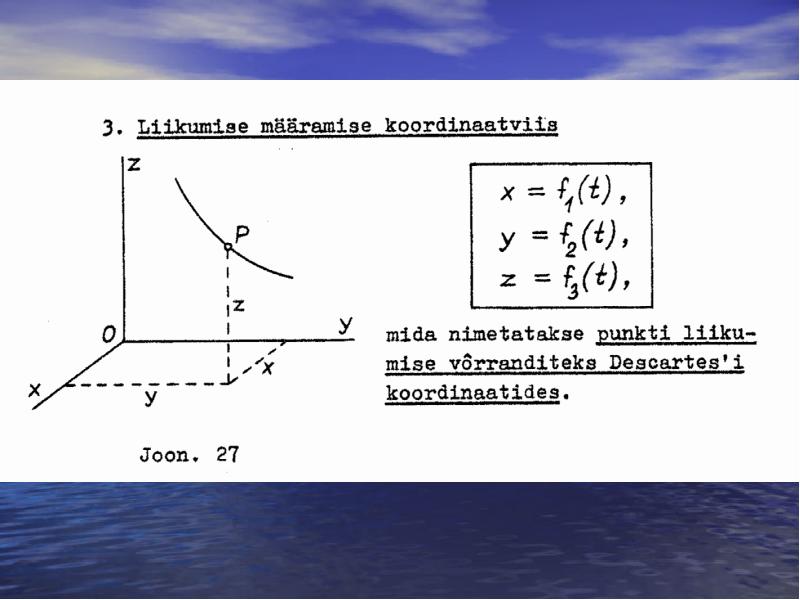
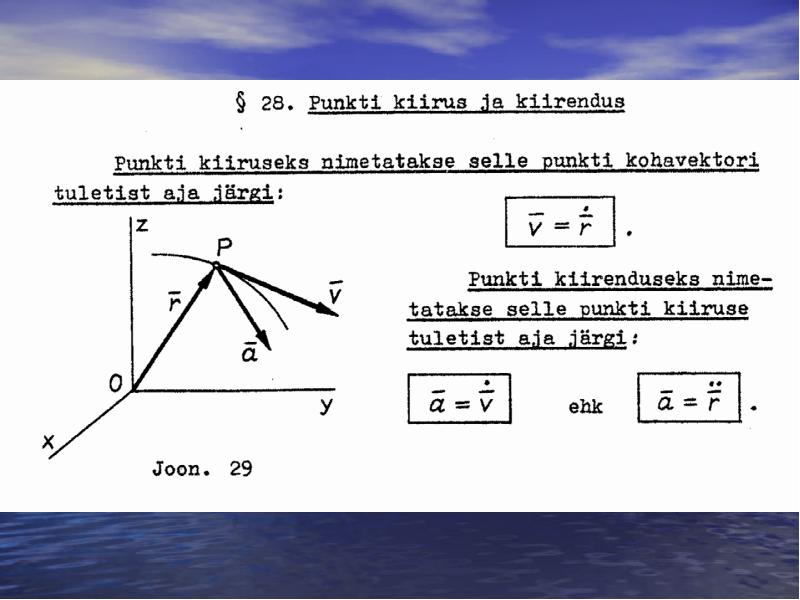
Mehaanika tekkis antiikajal, mil hakati rasket käsitsitööd kergemaks muutvaid masinaid ehitama. Et masinaid täiustada, tuli lähemalt tundma õppida eelkõige neid nähtusi, mis masinates aset leidsid. Tuli uurida liikumist ning liikumist mõjutavaid tegureid. Sõna ,,mehaanika" ongi tulnud kreeka keelest (? -- masinatesse puutuv). Tänapäeval ei piirdu mehaanika ainult masinate ehitamisega, vaid uurib liikumist üldisemalt. Mehaanikat saab jaotada kolmeks haruks: Kinemaatika, dünaamika, staatika Alljärgnev referaat räägibki kinemaatika osast üldisemalt. Kinemaatika mõiste Kinemaatika (kreeka keelest kinma - liigutus, liikumine) on mehaanika osa, mis tegeleb keha või masspunkti liikumise matemaatilise kirjeldamisega. Kinemaatikaks nimetatakse teoreetilise mehaanika osa, milles uuritakse materiaalsete kehade liikumise geomeetrilisi omadusi. Kinemaatika uurib ja kirjeldab kehade liikumist ruumis. Seejuures pole oluline, mis on liikumise põhjuseks
TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut Kodutöö aines Sissejuhatus Robotitehnikasse Tööstusroboti Mitsubishi RV-3SQ kinemaatika ja juhtimine Õpilane: Strippar Marko 999999 Juhendaja: Tõnu Lehtla Tallinn 2011 Sisukord 1.Roboti valik ..........................................................................................................................................3 2.Roboti kirjeldus
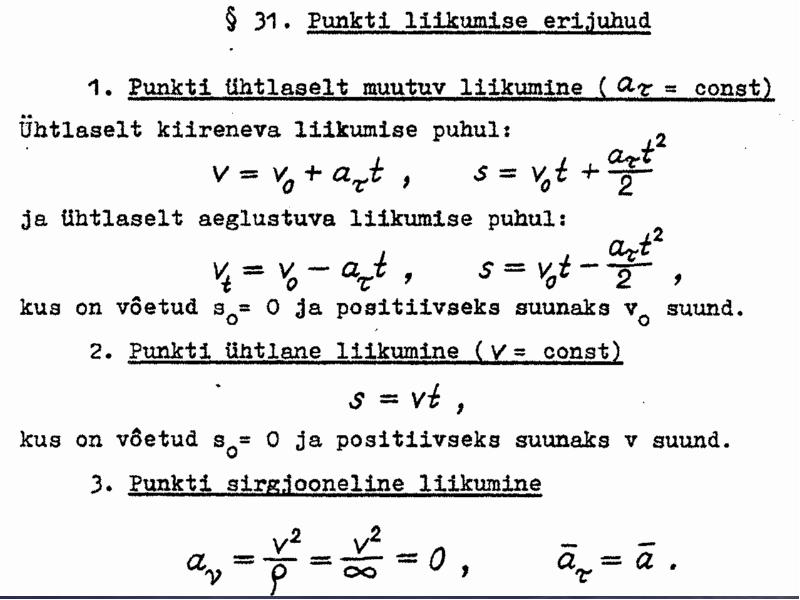
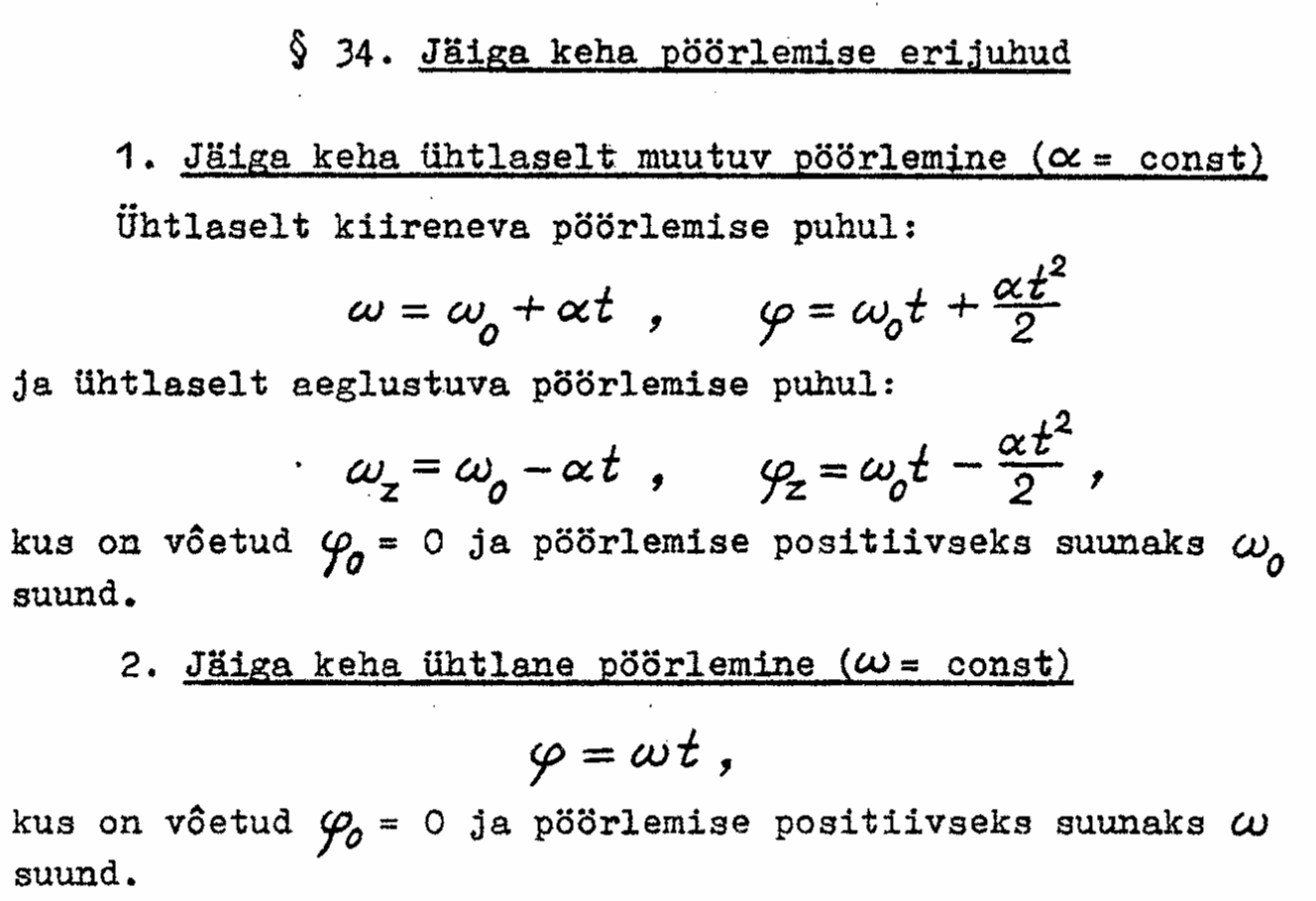
Kinemaatika Mehaanika põhiülesanne- Leida keha asukoht mistahes ajahetkel. Punktmass- keha, mille mõõtmed jäetakse lihtsuse mõttes arvestamata. Suhteline liikumine- liikumist vaatleme alati mingi teise keha e. Taustkeha suhtes. Taustkeha valikust sõltub keha liikumine. Nihe- nihe on vektor, mis ühendab keha algasukohta lõppasukohaga. Kiirendus- näitab kiiruse muutumise kiirust. Valem: a=(v-v0)/t Ühik: m/s^2 Kinemaatika põhivalemid ühtlaselt muutuva liikumise korral: s=v0*t+at^2 /2 v=v0+at




















































Kõik kommentaarid