Tallinn University of Technology
Department
of Electrical Engineering
Report on laboratory work 1 on General Course of Electrical Drive
SENSORLESS DRIVE POWER FLEX (ALLEN BRADLEY )
Jüri
Lina
666BMW
Group
M16 Variant 2
Tallinn
2014
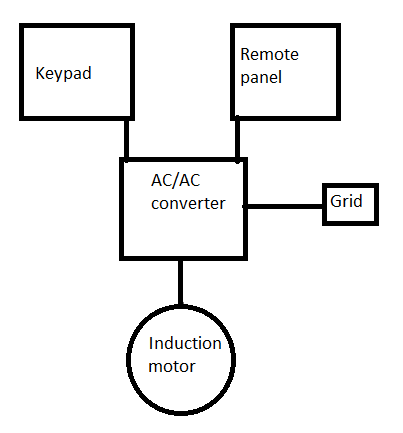
1. Functional Diagram
2.
Tables of observations
Task
Operation / Record
Observation
1
Reverse the motor speed . How long does the motor reverse?
Time to reverse was 16 seconds
2
2: Set the screen display an Output Voltage of the inverter . Turning the potentiometer, find accessible minimal and maximal voltages. Stop the drive.
Minimal: 2.8V
Maximal: 166V
3
3 Turn the keypad potentiometer half -way counter -clockwise. Run the drive and reverse it, count the shaft reversing time. Compare with the previous result and explain the difference . Stop the drive.
Reverse time was 7 seconds.
It was less because the motor was running at a lower speed compared to the previous experiment .
4
Set the Stop Mod to coasting (so called freewheel braking). Enable the Flying Start running function . Run the motor to the maximal speed. Then stop and restart it immediately before the motor stops. Observe the motor response. Stop the drive. Disable Flying Start.
The motor restart is very fast and it accelerates at exponential rate .
5
Set the PWM Frequency to the maximal level and run the motor again. Observe and explain the noise. Is it higher or less than before.
Less noise than before.
PWM noise is caused by the voltage inverter switching at a frequency in the audible range.
6
Using Boost Selection , set the variable torque boost to 30.0 VT. Run the motor at very low speed (2-3 Hz). Suspend warily the motor shaft with fingers. Observe the spring effect ( strong or weak ?). Stop the motor.
The spring effect was weak.
4. Solutions of the problems
1.1 What
dictates the maximal voltage of the drive? Why is it limited?
Maximal voltage
voltage is determined by the drive manufacturer and is usually dictated by the motors ability to dissipate excess thermal energy
that comes from the internal resistance of windings.
Test VIII - cumulative test by Piigli, Mets, Parker, Kauler "Top delusion" question / answers are red. Test I The induction machines are associated with the names of Dolivo - Dobrovolsky, Tesla. The synchronous machines are associated with the name of Ferraris. The DC machines are associated with the names of Jacobi and Henry. The electromagnetic torque is born in air gap. The torque is proportional to the current in dc motor. Which equations are correct? P = sW; oomega = tuletis fii'st The angular frequency is 2*pi()*n / 60 ja 2*pi()f The motor torque is equal to TL + J * oomega tuletis aja järgi The inductor supplies the motor with flux. The leading companies in the world market of electrical drive engineering are: Mitsubishi. The energy balance is described by energy conservation law. The armature supplies the motor with current. The cheapest and the most reliable is induction motor. The torque productio
Electrical drives and power electronics TESTS · The synchronous machines are associated with the names of Ferraris · Name the scientists who first studied electrical phenomena Coulomb · The DC machines are associated with the names of Jacobi Henry · The leading companies in the world market of electrical drive engineering are Mitsubishi · · The electromagnetic torque is born in air gap · What kind of drives the majority of drive systems present low accuracy · The induction machines are associated with the names of Dolivo-Dobrovolsky Tesla · One of the first eletrical motors has been built by Jacobi · Electromagnetic efficiency is measured in tesla · Time constants are measured by ms s hours · Who is the author of the first electrical motor Henry · Which rectifier cannot be built without a transformer 3-phase midpoint · Call the benefits of 3-phase rectifiers upon the 1-phase ones output voltage · Which rectifier has more diodes 3-phase bridge · In th
Analog Interfacing to Embedded Microprocessors Real World Design Analog Interfacing to Embedded Microprocessors Real World Design Stuart Ball Boston Oxford Auckland Johannesburg Melbourne New Delhi Newnes is an imprint of Butterworth–Heinemann. Copyright © 2001 by Butterworth–Heinemann A member of the Reed Elsevier group All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. Recognizing the importance of preserving what has been written, Butterworth–Heinemann prints its books on acid-free paper whenever possible. Library of Congress Cataloging-in-Publication Data Ball, Stuart R., 1956– Analog interfacing to embedded microprocessors : real world design / Stuart Ball. p. cm. ISBN 0-7506-7339-7 (pbk. : alk. paper) 1. Embedded computer
Tallinn University of Technology Department of Electrical Engineering Report on laboratory work 3 on General Course of Electrical Drive SERVO DRIVE (FESTO) Jüri Lina 666BMW Group M16 Variant 2 Tallinn 2014 1. Functional Diagram Component list: PC with Wmmemoc software SEC-AC-305 controller MTR-AC-55 servo motor with encoder External 24VDC power supply unit Test stand with slide and limit switches 4. Tables of observations Task Operation/Record Observation 1 Measure the slide position at Limit Slide moved to the right, switch 1 Limit 1 reached at 1,46 2 Turn potentiometer slowly counter- Slide sta
Tallinn University of Technology Department of Electrical Engineering Report on laboratory work 2 on General Course of Electrical Drive STEP DRIVE (FESTO) Jüri Lina 666BMW Group M16 Variant 2 Tallinn 2014 1. Functional Diagram 2. Program texts Program parts concenring the tasks of my variant are marked in bold, with an explanation of their meaning marked with // after them. Program 2: Velocity Profiles N000 G01 X180.13 FX20 N001 G01 X45.03 FX20 N002 G01 X180.13 FX50 // N002- Record number, G01- Move to position at specified speed, X180.13 - position parameter for X axis, FX50 -speed parameter for X axis. N003 G01 X45.03 FX50 N004 G01 X180.13 FX70 N005 G01 X45.03 FX70 N006 G01 X180.13 FX0 N007 G01 X45.03
1·1 Chapter 1 Routine maintenance and servicing 1 Contents Air cleaner element renewal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Fuel filter renewal - fuel injection engines . . . . . . . . . . . . . . . . . . . .36 Alternator drivebelt check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Hinge and lock check and lubrication . . . . . . . . . . . . . . . . . . . . . . .31 Automatic transmission fluid level check . . . . . . . . . . . . . . . . . . . . .27 Idle speed and mixture adjustment . . . . .
3. Quiz on Electrical Drive Motors and Models 1. What types of motors have the single-sided excitation? -(linear) synchronous 2. What types of motors have the dc excitation? - 3. What types of motors have the permanent magnet excitation? -synchronous, DC 4. What types of motors have the dc supply? -DC, synchronous 5. What types of motors have the slip rings? -induction 6. What types of motors are the brushless motors? -DC, synchronous 7. What orthogonal reference frames do you know? -(,)stator; (d,q)rotor;(x,y)arbitrary 8. What natural reference frames do you know? -3 phase 9. What stationary reference frames do you know? -stator 10. Write the frequency equilibriums that you know. -induction:w1=w2+w12;synchronous:w1=w12;DC:w2=-w12 11. What is the result of the mutual motion of the stator and rotor windings? -torque??? 12. What variables does the flux depend on? -L12 I12? L ja I 13. Write the formulae of the synchronous speed. -2*pii*f1/p 14. Write the formulae of the motor speed. -2*pi
Microcontroller homework for week 12 1. Three different stepper motors (illustrations on page 162-163): · permanent-magnet, · variablereluctance, · hybrid. The VR stepper has a soft iron rotor with teethand a wound stator. As current is applied to two opposing stator coils, the rotor is pulled into alignment with these twocoils. As the next pair of coils is energized, the rotor advances to the next position. The permanent magnet (PM) stepper has a rotor with alternating north and south. As the coils are energized, the rotor is pulled around. This figure shows a single coil to illustrate the concept, but a realstepper would have stator windings surrounding the rotor. The PM stepper has more torque than an equivalent VR stepper. The hybrid stepper essentially adds teeth to a permanent magnet motor,resulting in better coupling of the magnetic field into the rotor and moreprecise movement. In a hybrid stepper, the rotor is split into two parts, anupper and lo























Kõik kommentaarid