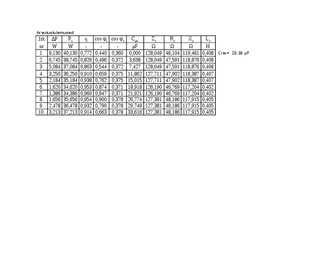
Arvutustulemused Jrk P P1 cos 1 cos 2 Carv Z2 R2 X2 L2 nr W W - - - F H 1. 9,130 40,130 0,772 0,440 0,360 0,000 128,049 46,104 119,461 0,408 Cres= 23,19 F 2. 6,745 38,745 0,826 0,496 0,372 3,638 128,049 47,591 118,876 0,408 3. 5,084 37,084 0,863 0,544 0,372 7,427 128,049 47,591 118,876 0,408 4. 3,250 36,250 0,910 0,659 0,375 11,862 127,711 47,902 118,387 0,407 5. 2,184 35,184 0,938 0,762 0,375 15,015 127,711 47,902 118,387 0,407 6. 1,620 34,620 0,953 0,874 0,371 18,918 126,190 46,769 117,204 0,402 7. 1,386 34,386 0,960 0,947 0,371 21,921 126,190 46,769 117,204 0,402 8. 1,656 35,656 0,954 0,900 0,378 26,774 127,381 48,186 117,915 0,405 9. 2,478 36,478 0,932 0,790 0,378 29,749 127,38
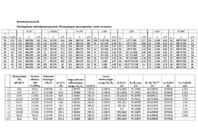
Katsetulemused 2A Ühefaasilised vahelduvooluahelad: Võimsusteguri parendamine, voolu resonants U₁ (V) ΔU (V) U₂ (V) I₁ (A) Ic (A) I₂ (A) P₂ (W) f (Hz) C (µF) α C α*C α C α*C α C α*C α C α*C α C α*C α C α*C α C α*C 50 10,5 110 300/150 220 114 15/150 11,4 104 300/150 208 100 0,25/100 0,25 77 1/5*5/100 0,77 82 1/100 0,82 26 300*1/150 52 50 12,5 110 300/150 220 130 15/150 13 104 300/150 208 58 0,5/100 0,29 91 1/5*5/100 0,91 82 1/100 0,82 26 300*1/150 52 50 14,5 110 300/150 220 108 30/150 21,6 102 300/150 204 73
Tallinna Tehnikaülikool Elektroenergeetika aluste ja elektrimasinate instituut Elektrotehnika II Kodutöö nr 5 (Var 11) Homogeene liin Tallinn 2017 Algandmed f =600 Hz l=200 km Ω R0=5.5 km nF C0 =10 km mH L0=3 km μS G0=0.65 km U 2=60 V I 2 =52.1mA 0 ψ 2=12.42 1. Arvutada pinge U1 ja vool I1 liini alguses aktiivvōimsus P ja näivvōimsus S liini alguses ja lōpus ning liini kasutegur η ω=2∗f∗π =2∗600∗3.14=3768 I ' 2 =I 2∗eiψ 2=52,1∗10−3∗e 12,42 j=52,1∗10−3∗( cos 12.42+ jsin 12.42 )=0.051+ j 0.011=0.052∠ 12.17 −3 0 Z 0 =R 0 +ω∗L0∗ j=5.5+3768∗3∗10 j=5.5+ j 11.3=12,57 ∠ 64,05 −6 −9
U
Ohmi seaduse valemi kuju I= Voolutugevus on võrdeline pingega ja
R
pöördvõrdeline takistusega
Ohmi seadus graafiliselt I-U teljestikus R2
ELEKTROTEHNIKA ALUSED Õppevahend eesti kutsekoolides mehhatroonikat õppijaile Koostanud Rain Lahtmets Tallinn 2001 Saateks Raske on välja tulla uue elektrotehnika aluste raamatuga, eriti kui see on mõeldud õppevahendiks neile, kes on kutsekoolis valinud erialaks mehhatroonika. Mehhatroonika hõlmab kõike, mis on vajalik tööstuslikuks tehnoloogiliseks protsessiks, ning haarab endasse tööpingi, jõumasinad ja juhtimisseadmed. Toote valmistamiseks kasutatakse tööpingis elektri-, pneumo- kui ka hüdroajameid, protsessi juhitakse arvuti ning elektri-, pneumo- ja/või hüdroseadmetega. Mida peab tulevane mehhatroonik teadma elektrotehnikast? Mille poolest peab tema elektrotehnika- raamat erinema neist paljudest, mis eesti keeles on XX sajandil ilmunud? On ju põhitõed ikka samad. Käesolev raamat on üks võimalikest nägemustest vastuseks eelmistele küsimustele. Selle koostamisel on lisaks paljudele e
Füüsika eksam 1. Liikumise kiirendamine. Taustsüsteem on mingi kehaga seotud ruumiliste ja ajaliste koordinaatide süsteem. Kohavektor on vektor, mille alguspunkt ühtib koordinaatide alguspunktiga. Trajektoor on keha või ainepunkti teekond liikumisel ruumis või tasandil. Trajektoori saab korrektselt kasutada ainult punktmassi korral. Kiirus on vektoriaalne suurus, mis võrdub nihke ja selle sooritamiseks kulunud ajagavahemiku suhtega(kiirusvektor on igas trajektoori punktis suunatud mööda trajektoori puutujat selles punktis) Kiirendus on kiiruse muutus ajaühikus. (Kiirendusvektor lahutub kiirenevalt liikuva keha trajektoori igas punktis trajektoori puutuja sihiliseks tangentsiaalkiirenduseks ning sellega risti olevaks normaalkiirenduseks ehk tsentrifugaalkiirenduseks) 2. Ühtlaselt muutuv sirgjooneline liikumine. a=consT =>kolmikvalem, Keha liigub sirgjoonelisel trajektooril, kusjuures
1. Vektorite liitmine ja lahutamine (graafiline meetod ja vektori moodulite kaudu). Kuidas leida vektorite skalaar- ja vektorkorrutis? Graafiline liitmine: Kolmnurga reegel – eelmise vektori lõpp-punkti pannakse uue vektori algpunkt. Vektorite liitmisel tuleb aevestada suundasid. Saab kuitahes palju vektoreid kokku liita. Rööpküliku reegel – vektorite alguspunkt paigutatakse nii, et nende alguspunktid ühtivad. Saab ainult kahte vektorit kokku liita. ax – x-telje projektsioon ay – y-telje projektsioon az – z-telje projektsioon i, j, k – vektori komponendid ⃗a + b⃗ =i⃗ ( a x + bx ) + ⃗j ( a y +b y ) + ⃗k (a z +b z ) Skalaarkorrutis: ⃗a ∙ ⃗b=|⃗a||b⃗| cosα=a x b x +a j b j +a z b z Kui suudame ära näidata, et vektorid on risti, siis võime öelda, et skalaarkorrutis on 0. ⃗ ⃗ Vektorkorrutis: |a⃗ × b|=¿ ⃗a∨∙∨b∨sinα Vektorid on võrdsed, kui suund ja siht on sama. Samasihilised võivad olla eri
Füsa eksami konspekt 1, Liikumise kirjeldamine Taustsüsteem on mingi kehaga seotud ruumiliste ja ajaliste koordinaatide süsteem. Kohavektor on vektor, mille alguspunkt ühtib koordinaatide alguspunktiga. Trajektoor on keha või ainepunkti teekond liikumisel ruumis või tasandil. Trajektoori saab korrektselt kasutada ainult punktmassi korral. Kiirus on vektoriaalne suurus, mis võrdub nihke ja selle sooritamiseks kulunud ajavahemiku suhtega (kiirusvektor on igas trajektoori punktis suunatud mööda trajektoori puutujat selles punktis). Kiirendus on kiiruse muutus ajaühikus. (Kiirendusvektor lahutub kiirenevalt liikuva keha trajektoori igas punktis trajektoori puutuja sihiliseks tangentsiaalkiirenduseks ning sellega risti olevaks normaalkiirenduseks ehk tsentrifugaalkiirenduseks) 2,* Ühtlaselt muutuv sirgjooneline liikumine. a=consT =>kolmikvalem, Keha liigub sirgjoonelisel trajektooril, kusjuures tema kiirendus on nii suunalt kui suuruselt muutumatu ning samasihilise kiirusega






















Kõik kommentaarid