TALLINNA POLÜTEHNIKUM Täiskasvanukoolituse osakond
KEE-007 977
(rühm) (registri nr)
(ees- ja perekonnanimi )
Kontrolltöö (töö pealkiri)
Elekriajamid (õppeaine)
Kodutöö nr. 1
Juhendaja R. Kask Esitamine TPT-sse ............ 2009
Hinne .................
Kuupäev .............
Õpetaja allkiri .......................
Tallinn 2009
ÜLESANNE Nr. 1 (Variant 7)
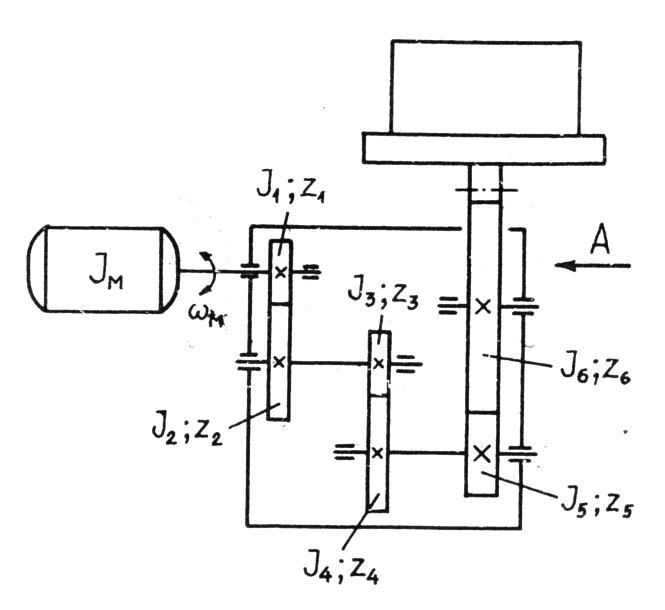
Määrata pikkihöövelpingi töölaua mehhanismi taanadatud inertsimoment . Mehhanismi
kinemaatiline skeem on kujutatud joonisel 1.1 Andmed tabelis 1.1
Joonis 1.1
Tabel 1.1
Vari Moot Hammasrataste Inertsimoment Hamm Töölaua ja
andi ori hammaste arv kgm2 as-lati detaili nr. pöörl samm mass emiss z1 z2 z3 z4 z5 z6 JM J1 J2 J3 J4 J5 J6 mm m1 kgm2 agedu s p/min
7 600 18 61 20 66 22 70 3,0 0,1 1,2 0,21 3,7 0,45 14,7 30 180 2600 4 0
LAHENDUS
Leiame mootori nurkkiiruse × = 30
×600 = = 63 -1 30
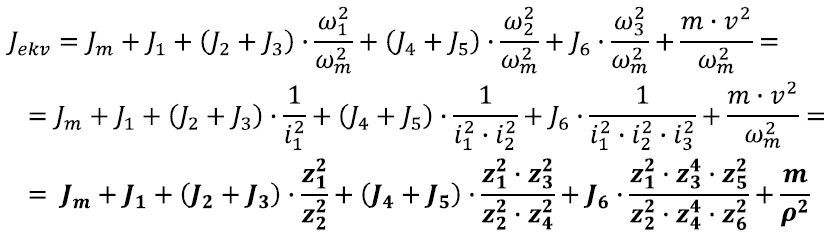
Mootori võllile taandatud inertsimomendi arvutamiseks tuletame valemi vastavalt joonise
kinemaatilisele skeemile:
Leiame töölaua ja detaili kogumassi
m = m1+m2 m = 1800+2600 = 4400 kg
Et arvutada ülekandemehhanismi ülekandetegurit tuleb kõigepealt leida töölaua joonkiirus:
× × = 60 ×
milles Zm reduktori viimase hammasratta hammaste arv , p hammaslati samm , nm
mootori pöörlemissagedus , i reduktori ülekandearv
= 1 × 2 × 3 = 2 × 4 × 6 1 3 5
66 66 70 = 18 × 20 × 22 =35,6
70 × 0,03 × 600 = = 0,59 60 × 35,6
Nüüd saame arvutada ülekandemehhanismi ülekandeteguri
= milles vto tööorgani joonkiirus
77
= = 175-1 0,44
Leiame taandatud inertsimomendi väärtuse:
324 324 × 400 = 3,0 + 0,14 + 1,2 + 0,20 × + 3,7 + 0,45 × + 14,7 3721 3721 × 4356 324 × 400 × 484 4400 × + = 3.34 × 2 3721 × 4356 × 4900 30625
Kuna kiirustvähendava ülekande korral võib sageli taandatud inertsimomendi lugeda
ligikaudselt võrdseks 1,1...1,2 kordse el.mootori inertsimomendiga siis kontrollime oma
tulemust:
= 1,1 ... 1,2 × 1,1 × 3,0 = 3,3 × 2 3.34 × 2
VASTUS: pikkihöövelpingi töölaua mehhanismi taanadatud inertsimoment on: 3,34 kgm2 ÜLESANNE Nr. 2
(Variant 7)
1) Arvutada rööpergutusega alalisvoolumootori käivitusreostaat eeldusel, et mootor on käivitamise hetkel koormatud momendiga Tst=0,85Tn . 2) Arvutada mootori pidurdustakisti vastulülituspidurduseks nimikiiruselt ankruvoolu suuna muutmisega.
Mootori nimiandmed:
Nimipinge Un= 440 V
Nimivõimsus Pn= 42,0 kW
Nimipöörlemissagedus nn= 1000 min-1
Nimivool In= 172 A
Nimikasutegur n= 84,5 %
LAHENDUS
Leiame niminurkkiiruse × = 30
×1000 = = 104,7 -1 30
Arvutame ankruahela takistuse 0,5 × × (1 - )
440 0,5 × × 1 - 0,845 = 0,198 172
, et saaksime leida ideaalse tühijooksu nurkkiiruse 0 , tuleb enne arvutada mootori
konstruktsiooniteguri ja nimimagnetvoo korrutis
- × × = =
440 - 172 × 0,198
= = 3,88 × -1 104,7 0 = 440
0 = = 113,4 -1 3,88
Leiame lühiajaliselt maksimaalselt lubatud käivitusvoolu, arvestades lähteandmetes
koormatuse kohta öelduga
1 0,85 × (2 ... 2,5) × , , kus , 1 292 ... 366 , valime I1 = 366A, leiame
ümberlülitusvoolule esitatud tingimuse 2 0,85 × (1,1 ... 1,2) × , 2 161 ... 175 ,
Valime käivitusastmete arvu. Soovituslik astmete arv mootoritele Pn= 10...50 kW on 2...3 ,
6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi- pöörlemissagedus nn = 1000 min-1, ankruahela takistus (ankru- ja lisapooluste mähised) Ra = 0,2 ja ankruahelasse on lülitatud lisatakisti takistu
Kodune töö nr 2 Ülesanne 3.4 variant 7 Arvutada ning ehitada faasirootoriga asünkroonmootori loomulik mehaaniline karakteristik nurkkiiruse vahemikus 0 kuni -0,50 . Mootori tüübi saan tabelist 14 ja mootori nimiandmed lisa 7'mest.Märkus: lisast 7 valin variandi B = 100%. Samuti ehitada tehistunnusjooned, mis vastavad lisatakisti väärtustele rootori ahelas. R2l,1= 0,0385 ja R2l,2= 0,067 Tabel 14 Variant Mootori tüüp 7 MTH613-10 Lisa 7 Faasirootoriga seeria MTH metallurgiamootorite tehnilised andmed. Staatorimähise ühendusskeem Y/ , 380/220, 50 Hz Võimsus cos Mootori B=100%, nn, n I2, E2k, Tmax, Tüüp KW p/min A V N*m MTH613-10 40 585 0,53 76,0 320 4120 1.Esiteks leiame ideaalse tühijooksu punkti.(tühijooksul libistus s=0): Mootori poolt arendatav moment on T0=
Tallinna Polütehnikum Päevane osakond EE.EA04.1.2318 Kodutöö Õpetaja: Koostaja: 28.05.2007 Tallinn,2007 ÜL 3.3(1) Arvutada täpsustatud Klossi valemi abil ning ehitada lühisrootorga asünkroonmootori loomulik mehaaniline karakteristik nurkkiiruse vahemikus 0 kuni -5,50 , samuti ehitada tehistunnusjooned, mis vastavad toitepingele 0,8 U 1n ja 0,7 U 1n Antud: 1. Mootori tüüp 4A80B4 2. Nimivõimsus Pn=1,5 kW 3. Nimi liinipinge Un=380 V 4. Nimipöörlemissagedus Nn=1415 p/min 5. Nimivool An=3,57 A 6. Nimikasutegur =77,0 7. Käivitusvoolu kordsus i =5,0 8. Käivitusmomendi kordsus k =2,0 9. Väär
EESTI MAAÜLIKOOL Tehnikainstituut Madis Vitsut RIPPVAGONETI ELEKTRIAJAM Kursuseprojekt õppeaines „Tehnoloogiaseadmete elektriajamid” TE.0023 Energiakasutuse eriala EK MAG II Üliõpilane: “ “ 2016. a. ………… Madis Vitsut Juhendaja: “ “ “ 2016. a. ………… lektor Erkki Jõgi Tartu 2016 SISUKORD TÄHISED JA LÜHENDID ........................................................................................................ 3 SISSEJUHATUS ........................................................................................................................ 5 1. TEHNOLOOGIA KIRJELDUS ................................
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT KODUTÖÖ AINES "MASINATEHNIKA" TIGUÜLEKANNE JA VÕLLIKOOSTU PROJEKTEERIMINE ÜLIÕPILANE: KOOD: JUHENDAJA: Igor Penkov TALLINN 2006 Sisukord 1. Mootori valik ................................................................................................... 3 2. Tiguülekanne arvutus ....................................................................................... 4 3. Võlli projektarvutus ......................................................................................... 7 4. Võlli kontrollarvutus ........................................................................................ 9 5. Liistu arvutus ................................................................................................... 10 6. Siduri valik ........................................................................
Reduktori projekteerimise näide 1. Mootori võimsuse arvutamine ja mootori valik Joon. 1. Konveieri trumli ajami kinemaatikaskeem 1 – mootor; 2 – sidur; 3 – hammasrattad (hammasülekanne) ; 4 – reduktori korpus; 5 – sidur; 6 – vedav rihmaratas; 7 – rihm; 8 – veetav rihmaratas; 9 – konveieri trummel; 10 – konveieri lint. Pöördemomendid ja pöörlemissagedused võllidel: Võll I - Т1 ja n1; Võll II - T2 ja n2; Võll III ehk töövõll T3 ja n3. Lähteandmed mootori valikuks: F = 3,3 kN, v = 2 m/s, D = 0,35 m, kus F on lintkonveieri koormus; v on lindi liikumise kiirus; D konveieri trumli läbimõõt. Pöördemoment töövõllil ehk III võllil: T3 = FD/ 2 = 3,3 ⋅ 103 ⋅ 0,35/ 2 = 578 Nm. Trumli pöörlemissagedus: n3 = 60 v /πD = 60 D = 60 ⋅ 2/πD = 60 ⋅0,35 =109,2 1/min. Trumli nurkkiirus ω3 = 2πD = 60 n / 60 = 11,43 rad/s Kasulik võimsus võllil III: P3 = T3 ⋅ ω3 = 57
504.064.38 (, , , , , .), . ..................................................................................................4 1. ..............5 1.1. ....................................................................................5 1.2. .........................................................................................5 1.3. .....................................................................................6 1.4. ....................................................................................7 1.5. ........................................................................................7 2. 30 /.....................................................................9 2.1. ..................................................................................9 2.2. .......
INTENSIIVKURSUS ”TOOTMISE AUTOMATISEERIMINE” Intensiivkursus kuulub projekti: „Energia- ja geotehnika doktorikool II” tegevuskavasse Ins. Viktor Beldjajev TÄITURMEHHANISMID Loengumaterjalid Tallinn 2010 Sisukord Tähistused ................................................................................................................................. 5 1. Sissejuhatus ........................................................................................................................... 6 2. Täiturmehhanismide olemus ............................................................................................... 7 2.1. Täiturmehhanismide klassifikatsioon .................................................................................. 7 2.2. Automaatsüsteem ......................................






























Kõik kommentaarid